1. 引言
新世纪以来,电子对抗技术逐渐成为现代战争的主要攻防手段,海陆空一体化的多维立体作战模式逐渐形成。面对武器的隐身技术、抗辐射和电子干扰等日益严重的威胁,电子战对作战系统的隐蔽性采用了越来越高的要求。目前,传统雷达等主动定位技术已不能在许多场合发挥其原有的威力。因此,专家学者们越来越重视对快速、狠、准确的无源定位技术的研究,只有在技术上占优势才能赢得战争的最终胜利。无源被动定位技术在无需对外发射电磁波的情况下,只依靠探测系统采集到的目标辐射源的角度信息,就可以根据实际情况采用某种具体的定位算法得到目标位置。
红外被动定位只根据方位角和俯仰角进行定位,也可以说是纯方位目标定位的一种,也是研究较早、应用范围较广的无源被动定位的一种,能有效解决从受噪声干扰的角度测量值中估计出目标准确位置的问题。对于目标被动跟踪的问题,最经典的方法其实就是基于测量角度的扩展卡尔曼滤波(Extended Kalman Filter, EKF)目标跟踪算法 [1]。EKF算法虽然应用和发展都很广泛,但是也存在一定的缺点,比如会在线性化的过程中引入模型误差,导致整个状态的估计偏差较大,甚至可能会导致滤波过程发散;还有就是滤波过程中使用的雅可比矩阵可能会导致奇异情况的出现。不断有不同的滤波优化算法被采用,叶俊 [2] 采用了一种能对噪声统计特性进行实时估计的自适应无迹卡尔曼滤波算法,通过结合间歇信息递推滤波,改进的无源定位方法能显著提高定位精度。文献 [3] 基于平方根无迹卡尔曼滤波(Square-root Unscented Kalman Filter, SRUKF)和后向平滑的思想,采用了一种改进的SRUKF双向滤波算法,有效地提高了定位精度和跟踪稳定性。文献 [4] 采用了一种结合无迹变换(Unscented Transform, UT)变换和强跟踪滤波的定位算法,该方法通过反复利用观测信息来估计状态向量和协方差矩阵,使其更真实,滤波精度更高。高春艳等人 [5] 针对移动目标的跟踪过程中可能出现运动轨迹突变的问题,提出一种基于扩展卡尔曼滤波的交互多模型算法。
本文考虑到各种测量噪声及误差对定位精度的影响,采用基于时间序列的ARIMA-UKF滤波算法,并和EKF和UKF进行对比分析。接着通过目标的运动模型对机载观测平台的机动轨迹进行设计,通过计算机载观测平台在“一步最优”状态下每一时刻的次优航向角,给出基于FIM行列式最大指标的运动轨迹设计方案,最后讨论在机载观测平台静止和机动这两种情况下对200 km红外运动目标的误差影响。
2. 目标跟踪滤波算法
2.1. 时间序列模型的建立
ARIMA时间序列模型是自回归滑动平均模型ARMA的扩展 [6],可以处理时间序列不平稳的情况。与ARMA模型相比较,ARIMA时间序列模型的适用范围更广一些,而且平稳序列的本质就是让系统变的更加稳定,变量更加收敛。为了提高该类模型的适应性,需要利用ARIMA模型先对时间序列进行平滑处理,此时,时间序列是平稳的 [7],故用ARMA模型进行分析。ARMA(p, q)模型的一般数学表达形式为:
(2-1)
上式中,
表示在任意t时刻的观测值;
作为误差项,是由t时刻系统的预测值与实际机载观测平台的观测值做减法得到;
和
均为模型系数。
设
,同时令
、
,则公式(2-1)可以转化为:
(2-2)
引入滞后算子B,将上式整理为:
(2-3)
为将公式(2-3)写成满足
的最小二乘形式,先令
,其中
,
,此外根据滞后算子B中各项分式前的系数都是相等的这一条件,可以得到:
(2-4)
将上式简化得:
(2-5)
然后,将
展开如下:
(2-6)
(2-7)
(2-8)
联立公式(2-7)和公式(2-8):
(2-9)
令状态向量
,结合机载观测平台的观测值
,可以得到系统状态空间模型的观测方程表达式为:
(2-10)
联立公式(2-5)和公式(2-9)可得状态空间方程表达式:
(2-11)
其中:
;
。
综上所述,已经得到了ARMA(p,q)模型与状态空间模型之间的转换关系,在传统的UKF算法的基础上,我们知道统计参数
和
是未知的,通过时间序列分析模型与状态空间之间的转换关系,并利用建立ARIMA过程中求取得到的模型参数进一步在求取任意t时刻的估计值的基础上得到相应t时刻的
和
。因此基于ARIMA-UKF算法的具体流程如图1所示,具体步骤为:
1) 首先根据角度信息的测量历史数据得到ARMA模型与滤波算法所需状态空间模型之间的转换关系;
2) 接着建立ARIMA模型,并确定其模型参数;
3) 然后在步骤(2)的基础上得到相应t时刻的
和
;
4) 代入到基于UKF滤波跟踪的目标定位模型的状态方程和观测方程,就可以得到基于ARIMA-UKF滤波算法的新的观测方程和状态方程。
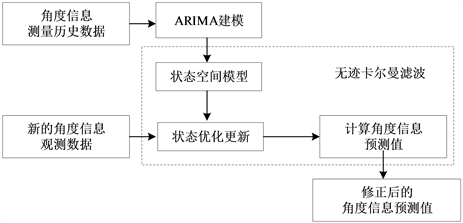
Figure 1. Positioning model based on ARIMA-UKF algorithm
图1. 基于ARIMA-UKF算法的定位模型
2.2. 跟踪误差的理论误差下界
在目标跟踪过程中,目标状态的最大似然估计的误差下限接近后验克拉美罗下界RCRLB,定义为FIM矩阵的逆 [8],递推公式表示为:
(2-12)
上式中,
表示地面目标运动时的过程噪声协方差,
表示目标状态转移矩阵,
表示雅可比矩阵,
表示测量噪声矩阵。由于机子啊观测平台的运动速度比地面目标运动速度快的多,所以可以忽略目标的运动速度当作静止目标处理,不考虑过程噪声的影响。此时,
,
为单位矩阵,那么:
(2-13)
目标位置估计的理论误差下界PCRLB就可以表示为:
。
实验数据:观测站初始位置
,机载观测平台速度为1 km/s,假设机载观测平台沿x轴匀速飞行,地面目标的初始位置为
;方位角和俯仰角的测量噪声设置为
,采样时间间隔为0.2s,对目标的位置估计进行均方根误差统计。
由图2可知,采样刚开始时,三种滤波算法都没有立刻向目标位置收敛,而是当采样达到一定次数时才开始逐渐收敛;对于EKF滤波算法和UKF滤波算法,当采样次数达到100和80次左右时,才开始有效收敛;而对于ARIMA-UKF算法,当采样次数达到40次左右时,就开始收敛,达到80次时,已经高精度地收敛于真实值。对静止目标定位算法而言,基于ARIMA-UKF算法的收敛效果最好,且很快趋于理论误差下界PCRLB。探测距离200 km处,EKF滤波误差为0.43 km,UKF滤波误差约为0.37 km,ARIMA-UKF算法的误差约为0.19 km。
 (a) 基于EKF算法的定位误差图
(a) 基于EKF算法的定位误差图  (b) 基于UKF算法的定位误差图
(b) 基于UKF算法的定位误差图 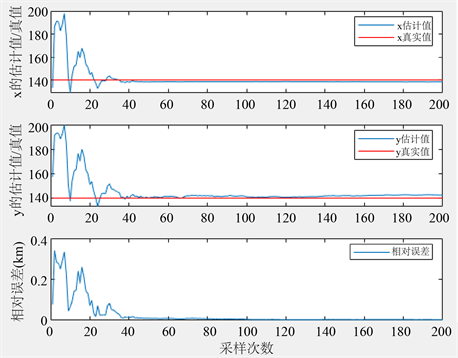 (c) 基于ARIMA-UKF算法的定位误差
(c) 基于ARIMA-UKF算法的定位误差  (d) 定位误差对比图
(d) 定位误差对比图
Figure 2. Comparison and analysis of filtering algorithm errors
图2. 滤波算法误差对比分析图
3. 基于FIM行列式的载机机动轨迹设计
3.1. FIM行列式最大指标
以平坦地面目标为例,因为机载观测平台航行高度较高,设机载观测平台的运动平面位于和地面目标运动处于一定高度的平行平面 [9],机载观测平台的初始位置为
,则载机的运动方程为:
(2-14)
其中,v表示机载观测平台的运行速度;
是载机的航向角。
把目标和平台的相对运动抽象至二维平面,目标的位置坐标为
。以目标轨迹平面为坐标平面建立坐标系,则机载观测平台与目标的位置关系如图3所示,得到角度的测量方程为:
(2-15)
其中,
为方位角的量测噪声。
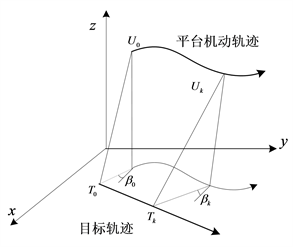
Figure 3. Movement situation of the target and the airborne observation platform
图3. 目标与机载观测平台的运动态势
设k时刻观测系统的FIM矩阵为:
(2-16)
上式中,
是待估目标系统的雅可比矩阵,表示为:
(2-17)
其中,
。
则公式(2-17)可以表示为:
(2-18)
综合公式(2-17)和公式(2-18)可以得到FIM的递推形式为:
(2-19)
其中:
(2-20)
为了解决求解上式需要大量计算航向角的情况,本文给出“一步最优”算法,也称为贪心算法。虽然在求解问题的过程中得到的并不是全局最优解,但其最终结果却是全局最优解的近似解,也能达到计算简单、减小误差的效果 [10]。算法的目的是将当前A时刻到A + 1时刻的FIM最大化,求解当前时刻载机的航向,从而实现某种意义上的局部优化,分步优化可以保证结果相对较好。设目标在A到A + 1时刻内保持静止,位于点
,机载观测平台在k时刻位于点
,每个采样时间以一定的航向
匀速直线运动,速度为
,k + 1时刻运动至点
,如图4所示。
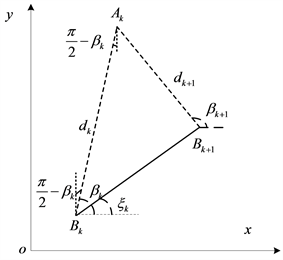
Figure 4. The airborne observation platform and the target movement situation from the top view
图4. 俯视角度机载观测平台与目标运动态势
设采样周期为
,则
,k时刻目标与机载观测平台的距离为
,k + 1时刻目标与机载观测平台的距离为
,则:
(2-21)
可以求得:
(2-22)
因为
(2-23)
(2-24)
所以
(2-25)
将公式(2-25)代入公式(2-22)可得:
(2-26)
令
,那么求
的最大值就是求
的最大值,对
求导:
(2-27)
计算上式,可以得到:
(2-28)
令
则
,得到
(2-29)
由公式(2-29)可以得到机载观测平台的运动方程:
右支轨迹方程
(2-30)
左支轨迹方程
(2-31)
3.2. 轨迹规划仿真分析
(1) 匀速运动目标
仿真参数设定 [11]:观测平台初始位置
,机载观测平台速度为1 km/s,地面未知目标的初始位置为
,目标运动速度为15 m/s,运动方向为0.8 rsd。方位角和俯仰角的测量噪声分别设置为
,采用ARIMA-UKF滤波算法,采样间隔为0.5 s,采样时间为500 s。
如图5和图6所示,在不考虑载机运动的情况下,平台也能对匀速运动的目标实现良好的跟踪效果,但定位跟踪的误差比较大,在后期,由于目标距离机载观测平台越来越远,距离的增加使得定位误差越来越大。当机载观测平台能够按照设计的最优机动策略进行机动对目标进行跟踪时,能够很好地跟踪目标。如表1所示,选取距离200 km处的误差进行分析,对于匀速运动目标,当机载观测平台和目标相距200 km时,考虑机载运动时误差较小,测距误差可达到0.487 km。
 (a) 滤波曲线
(a) 滤波曲线 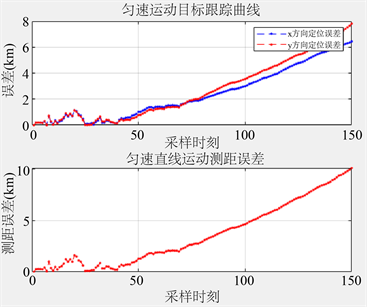 (b) 定位误差曲线
(b) 定位误差曲线
Figure 5. The uniform velocity target tracking and filtering curve without considering the airborne motion
图5. 不考虑机载运动,匀速目标跟踪及滤波曲线
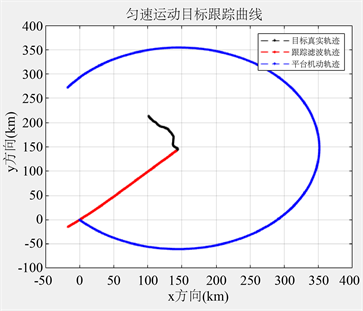 (a) 相对运动曲线
(a) 相对运动曲线  (b) 测距误差曲线
(b) 测距误差曲线
Figure 6. Considering airborne maneuvering, uniform target tracking and filtering error curves
图6. 考虑机载机动,匀速目标跟踪及滤波误差曲线

Table 1. The influence of the static and maneuvering of the carrier aircraft on the error of the uniform moving target
表1. 载机静止和机动对匀速运动目标的误差影响
2) 匀加速运动目标
仿真参数设定:观测平台初始位置
,机载观测平台速度为1 km/s,地面目标的初始位置为
,目标运动速度为15 m/s,加速度为5 m/s2,方位角和俯仰角的测量噪声分别设置为
,采用ARIMA-UKF算法,采样间隔为0.5 s,采样时间200 s。
对比图7和图8可以看出,机载观测平台的有效最优机动能够更稳定、准确地跟踪目标,对目标的跟踪误差比不考虑机载观测平台机动时有所减小。200 km处的误差如表2所示,有效机动时,定位误差在1 km以内,测距误差在0.6 km以内。
 (a) 滤波曲线
(a) 滤波曲线  (b) 误差曲线
(b) 误差曲线
Figure 7. The filter error curve of the uniformly accelerated target without considering the maneuvering of the observation platform
图7. 不考虑观测平台机动,匀加速目标的滤波误差曲线
 (a) 相对运动曲线
(a) 相对运动曲线 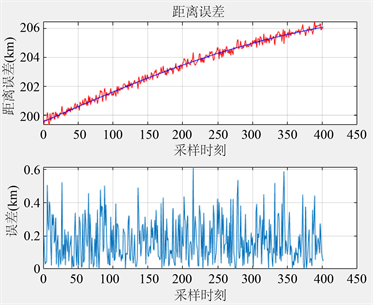 (b) 误差曲线
(b) 误差曲线
Figure 8. The maneuvering, uniform acceleration target tracking and filtering error curve of the airborne observation platform
图8. 机载观测平台机动,匀加速目标跟踪及滤波误差曲线
Table 2. The influence of the static and maneuvering of the carrier aircraft on the error of the uniformly accelerated moving target
表2. 载机静止和机动对匀加速运动目标的误差影响
3) Singer模型运动目标
仿真参数设定 [12]:观测平台初始位置
,机载观测平台速度为1 km/s,地面目标的初始位置为
,目标运动速度为15 m/s,加速度为5 m/s2,方位角和俯仰角的测量噪声分别设置为
,系统误差表示为
。在实时调整系统噪声中对弱化因子
取0.8,遗忘因子
为0.95。采用ARIMA-UKF滤波算法,UKF卡尔曼滤波器取
,采样间隔为0.5 s,采样时间为500 s。
 (a) 滤波曲线
(a) 滤波曲线 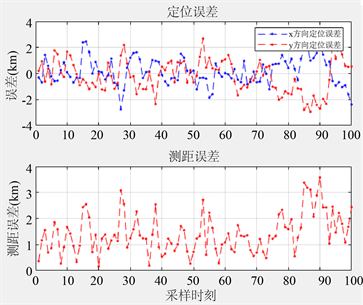 (b) 滤波跟踪误差曲线
(b) 滤波跟踪误差曲线
Figure 9. Filtering error curve of the Singer motion model without considering the movement of the platform machine
图9. 不考虑平台机动动时,Singer运动模型的滤波误差曲线
Table 3. The influence of the static and maneuvering aircraft on the error of the moving target of the Singer model
表3. 载机静止和机动对Singer模型运动目标的误差影响
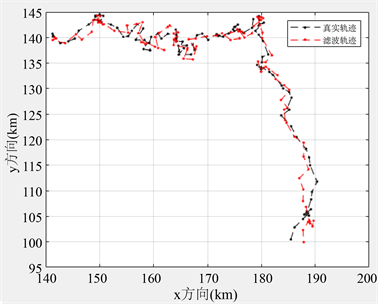
 (a) 相对运动曲线
(a) 相对运动曲线  (b) 运动误差曲线
(b) 运动误差曲线
Figure 10. Singer moving target tracking and filtering error curve when the platform maneuvers optimally
图10. 平台最优机动时,Singer运动目标跟踪及滤波误差曲线
对比图9和图10,基于最优轨迹的机载观测平台于能很好的跟踪Singer运动模型目标,跟踪精度大幅提高,且跟踪结果也趋于收敛。不考虑机载观测平台机动时,定位误差和测距误差都在4 km以内;然而当机载观测平台在有效最优机动时,Singer运动模型目标和机载观测平台相距200 km处的误差如表3所示,定位误差在0.643 km以内,测距误差可以达到0.398 km以内。
4. 结论
本文主要是针对跟踪滤波算法及机载观测平台的轨迹优化进行了研究。首先考虑到测量过程中涉及到的测量误差及噪声干扰项,在EKF和UKF滤波算法的基础上,本文采用一种基于时间序列的ARIMA-UKF滤波算法,并与EKF、UKF在同等仿真条件下的定位性能做出比较,结果表明了ARIMA-UKF算法和EKF、UKF算法都是在达到一样采样次数之后才开始慢慢收敛,但ARIMA-UKF滤波算法能更快地收敛于PCRLB下界,具有更好的滤波效果。然后对机载观测平台的机动轨迹进行设计,计算了机载观测平台在“一步最优”状态下每一时刻的次优航向角,给出基于FIM行列式最大指标的运动轨迹设计方案。仿真实验表明最优机动测量均会产生两条左右对称的轨迹,和平台的运动速度和与目标之间的距离有关系;实验结果表明机载观测平台在最优机动策略的轨迹规划下对目标的定位相比机载观测平台不机动的情况下有更高的定位精度,探测距离为200 km处,目标和机载观测平台相距200 km处定位精度可达到0.643 km,测距误差降到0.398 km左右,测距误差百分比达到0.2%以内。