1. 引言
在各种滤波算法中,卡尔曼滤波算法及其变体因其在信号处理和系统控制领域中易于实现和递归而受到越来越多的研究关注 [1] [2] [3] [4]。众所周知,传统的卡尔曼滤波可以在高斯噪声假设下得到线性系统在最小方差意义下的最优估计。然而,在实际工程中,系统参数可能会受到随机扰动的影响,包括随机故障、环境突变、子系统互连等。因此,具有随机参数的非线性系统获得了一定的研究兴趣,见 [5] [6]。鲁棒卡尔曼滤波算法被认为是解决这类系统的强大工具。例如, [7] 对具有静态参数不确定性的线性时变系统提出了一种鲁棒卡尔曼滤波算法,以提高估计性能。 [8] 提出了一种新息饱和的扩展卡尔曼滤波器,该滤波器可以自适应地调整饱和边界,以处理由模型不确定性、网络攻击和数据传输误差引起的测量异常值。
由于传感器的老化、故障和未建模的动力学,滤波器或估计器有时会受到外部未知输入或干扰的影响。未知输入的存在不仅会降低估计性能,而且会导致系统的发散。到目前为止,未知输入条件下的估计问题在设备故障检测、环境监测和道路粗糙度估计等领域发挥了重要作用,也有了丰硕的成果。例如, [9] 首先提出了一个针对没有先验信息的未知输入的最优滤波器。然后,在 [10] 中进一步研究了这一问题,讨论了其稳定性和收敛性条件。然而,这些结果仅限于估计状态,而不产生对未知输入的估计。因此,为了更好地反映未知输入对状态估计精度的影响,在过去几十年的时间里,未知输入和状态的联合估计问题被认为是一个有意义的课题,具有实际意义和理论意义 [11] [12]。
为了便于系统分析和设计,大多数现有文献都假设控制器或估计器是基于传统的时间触发通信方案进行更新的,即执行信号或测量输出是周期传输的 [13] [14]。但是,对于带宽有限的通信信道,事件触发方案可以避免网络传输负担的增加和通信资源的浪费。具体地,事件触发通信机制仅在满足某些特定条件时才触发信号传输,从而有效地减少了网络资源的损失,弥补了能量的不足 [11] [15]。最近,在 [16] 中提出了一种新的动态事件触发机制,通过引入一个额外的内部动态变量,可以保证所得到的闭环系统的稳定性。另外,自适应事件触发因其参数可以根据特定的情况进行调节也受到了广泛的关注 [17]。然而,值得注意的是,事件触发机制下未知输入和状态的联合估计问题虽然具有明显的实际意义,但尚未得到足够的研究兴趣,这产生了我们目前研究的动力。
在上述讨论的基础上,本文针对一类具有随机非线性的离散时变系统,设计了一种基于事件触发机制的状态和未知输入的联合估计器。我们面临的主要挑战如下:1) 如何将未知输入与系统状态解耦,以消除未知输入对状态估计精度的影响;2) 如何设计合适的递归滤波器,使状态和未知输入的滤波误差协方差的上界最小。为了克服这些挑战,本文的主要贡献如下:1) 系统模型是全面的,涵盖了未知输入、随机非线性和事件触发方案,更接近工程实际;2) 触发条件的影响清楚地反映在滤波误差协方差的上界中;3) 递归得到期望的分布滤波器增益可以使滤波误差协方差的上界最小。
2. 问题描述
考虑一类具有随机非线性的离散时变系统:
(1)
其中
为不能直接测量的目标系统的状态向量,
是未知的系统输入,
为输出向量。
,
和
是具有适当维数的已知矩阵。假设过程噪声
和测量噪声
是互不相关的、零均值的、分别具有已知协方差
和
的随机信号。
随机非线性函数
满足
且具有以下统计特性:
(2)
(3)
(4)
其中s是已知的正标量,
是零均值高斯序列,
和
都是具有适当维数的已知矩阵。
假设1:系统(1)的初始值
是一个随机向量,有均值
和协方差
,并且与
,
,
和
是互不相关的。
假设2:
,并且
。
本文引入自适应事件触发机制来调节从传感器到滤波器的信号传输,以减少不必要的资源浪费,这意味着只有在满足规定的条件时,测量信号才被传输到滤波器。为此,定义以下触发条件:
(5)
其中,
,
是最新传输时刻的测量值,当满足条件
时,数据会被传输给滤波器。因此,触发时刻
定义如下
(6)
这里,事件触发的自适应时变函数可构造为
(7)
其中,
,
是属于
范围内的正常数,
的初始值
满足
。并且,很容易证明
是一个以
为上界的单调递增函数。
考虑到以上给定的系统特性和事件触发机制,我们构造了以下联合滤波器:
(8)
其中
是未知输入
的估计,
是
在k时刻的一步预测,
是在
时刻的
的估计。
和
是需要设计的估计器增益。
为方便计算,我们首先计算得
(9)
和
(10)
现在,我们来计算误差系统。设
,
和
分别为未知输入估计误差、状态预测误差和状态估计误差。于是我们可以得到
(11)
假设3:估计器增益
满足
(12)
注1:为了消除未知输入对误差的影响,我们给定以上假设。这种解耦方法在众多未知输入的文献中得到普遍使用 [10] [11]。另外,在假设2的条件下,可以看出(12)至少存在一个解
。
因此,未知输入误差可以重写为
(13)
为了便于后续的推导,我们定义:
1) 状态估计误差协方差记为
2) 未知输入估计误差协方差定义为
本文的目的是构造基于事件触发的联合滤波器,求得以上状态估计误差协方差和输入估计误差协方差的上界,并寻找最优的估计器增益
和
,使得误差协方差的上界在每个时刻都最小。
3. 主要结果
在本节中,我们将首先使用数学归纳获得状态和未知输入的滤波误差协方差的上界,然后寻找适当的增益矩阵
和
最小化这些上界。在此之前,我们先给出以下引理,以便后面的推导。
引理1:对于具有适当维数的任意矩阵
,
和
,以下不等式成立
其中,a是一个任意的正标量。
定理1:对于目标系统(1)和测量输出(2),在约束条件(12)下考虑联合滤波器(8)。对于给定的正标量
和
,假设存在两个矩阵序列
和
,有初始值
和
,且满足以下黎卡提差分方程:
(14)
(15)
其中,
证明:利用数学归纳法进行证明。基于初始条件,我们在初始时刻有
,
。然后,我们假设在每个k时刻,有
和
。接下来,我们需要证明在
时刻,有
和
。
由随机非线性函数的性质,可得
(16)
由事件触发的定义,我们可以看出
(17)
由(11)、(16)~(17)和引理1可以得到
同样地,可得
其中
利用引理1,可得
所以,可以得到如下状态误差协方差的上界
同理,可求得未知输入
的误差协方差上界
。
综上,我们可以得到
得证。
在下面的定理中,通过适当设计估计器增益
和
,使得到的上界
和
最小化。
定理2:在约束(12)下,上述递归方程给出的状态和未知输入估计误差协方差的上界可以通过以下增益最小化:
(18)
(19)
其中,
证明:不难看出,未知输入协方差矩阵的上界可以重写成
我们利用拉格朗日乘子法来证明,首先引入拉格朗日因子
,构造如下函数:
(20)
利用完全平方法,进一步得到
(21)
显然,当
(22)
时,
取最小值。
将约束(12)带入到上式,可得
(23)
将(23)代回(22)中,于是可得增益
满足(18)。
由
和
的定义,状态协方差上界
可以重写为
显然,当增益满足(19)时,以上协方差取得最小值。定理得证。
4. 数值仿真实例
在本节中,我们引入一个实例来验证联合滤波器的有效性。在有限时域N = 200内,假设系统的参数为:
随机非线性函数为:
其中随机参数
的方差为0.0001的零均值随机变量。
定义如下的未知输入量
其他辅助参数选定为
,
,
,
。状态和未知输入初始值及其估计值
,
,
,
。
为了量化估计精度,我们使用均方误差(MSE),定义如下:
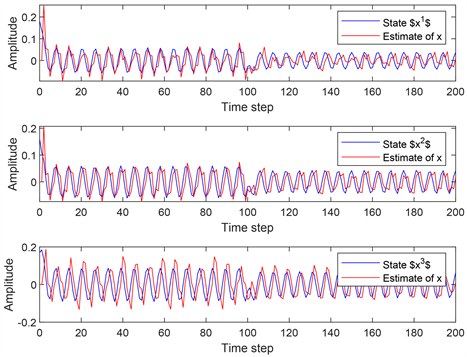
Figure 1. True value of the state and its estimation
图1. 状态的真实值及其估计
仿真结果如图所示。图1显示了该状态的三个分量的运动轨迹和相应的估计值,由此我们可以看出,所提出的算法在估计该状态方面具有较好的性能。图2描述了未知输入的两个分量的轨迹和相应的估计值,可以看出该联合滤波器可以有效地估计系统的未知输入。图3和图4分别绘制了状态和未知输入的MSE及其上界,且MSE保持在相应的上界之下,证实了我们算法的设计期望。图5绘制了传感器的触发时刻,不难看出,数据传输的频率大大减少,从而有效减轻了能量消耗。仿真结果验证了所提出的事件触发机制的有效性。

Figure 2. True value of the unknown input and its estimation
图2. 未知输入的真实值及其估计

Figure 3. MSE of the state and its upper bound
图3. 状态的MSE及其上界

Figure 4. MSE of the unknown input and its upper bound
图4. 未知输入的MSE及其上界
5. 总结
本文研究了基于事件触发机制的随机非线性系统,同时估计未知输入和状态的递归滤波问题。引入了一个函数来调整触发阈值,以节省网络资源。利用数学归纳法和类黎卡提差分方程技术,分别递归地得到了状态和未知输入的误差协方差的上界。然后,利用完全平方法,得到了所需的滤波器参数,使每个时刻的上界最小化。最后,给出了一个数值实例,验证了该联合估计算法的有效性。
NOTES
*通讯作者。