1. 引言
倾斜摄影技术方面的基础理论研究在我国直至2010年才正式成为测绘地理信息与测绘遥感两个领域新的热点 [1]。全自动精细化的实景三维模型技术构建正成为当今遥感技术和三维计算机视觉领域所研究的热点之一 [2]。利用无人机和倾斜的摄影及测量等技术实时获取实时影像,可以同时提高三维模型设计的图像真实度、精度以及三维建模计算效率,具有设计作业安全高效、成本低省等方面众多明显优势 [3]。倾斜摄影可以有效提升模型的生产效率,缩短作业完成时间,把无人机原本承担大量重复性的外业工作任务转变为内业工作,降低操作者外业劳动强度 [4]。目前国内学者对倾斜摄影的技术在各行业的应用进行了广泛的研究,但是对不同机型和软件对于建模效果以及成本控制的研究还较少。本文通过三维全景模型构建的对比来验证不同机型以及软件的优缺点,可以在以后的任务中选择适合的机型、软件、飞行高度来减少任务量,节省成本,具有相当的现实意义。对南京信息工程大学采用PHANTOM4RTK和MAVIC2Pro分别进行数据采集,得到数据组A和数据组B。对A组影像资料用DJI Terra和context capture分别进行处理,产出模型production1和production2,对产出的模型进行对比,以此探讨两种软件各有的优势。通过对比两种无人机作业过程中遇到的具体情况,以此探讨两款无人机各自的优势。对数据组B用context capture进行处理,产出模型production3,通过对比最终产出模型production2和production3的效果,分析不同镜头所采集的影像资料对于最终产出模型效果的影像;对东南大学成贤学院用MAVIC2Pro进行数据采集,使用不同的航高,得到数据组C,对数据组C用context capture进行处理,产出模型production4,通过对比最终产出模型production3和production4的效果,以此分析不同航高的作业对于模型质量的影像。最终的产出模型会为实景三维模型的构建过程提供一个参考。
2. 无人机倾斜摄影技术
倾斜摄影技术作为一项先进的航空测量技术,最够最大程度地增加拍摄区域面积,通过数字影像、摄影测量技术与无人机技术相结合的方式,实现航空测量。无人机设备挂载相机,采集地面的垂直影像和倾斜的影像,再由软件进行处理,将拍摄的物体与空间上的点进行组合,借助地面像控点、空间GPS信息,获取具有倾斜角度的相片数据资料。
2.1. 布设像控点
像控点是无人机倾斜成像摄影以及业内影像信息解析采集和三维建模计算的理论基础,用于自动纠正无人机上因定位传感器受限或因电磁传感器干扰等而容易产生的目标位置偏移、坐标精度要求过低以及无人机因使用气压计可能产生的高层差值变化过大等问题 [5]。像控点的布设及位置要求应相对均匀有效的分布于在航摄区域航向和与旁向航线方向重叠的区域范围内,像控点选点要求一般应是选择点在观测场地比较平坦、相对观测位置基本固定的和易于快速而准确地进行摄影测量、记录目标影像是比较清晰且是最易于判刺的两个地方,像控点一般是有标靶式像控点和油漆式像控点,油漆式的目标像控点主要分为喷漆式目标和涂漆式 [8]。
2.2. 航摄参数设计
航摄的参数和设计方法的主要技术指标包括地面分辨率、航行高度范围、拍照模式、云台角度和像素片重叠度系数等。
2.2.1. 地面分辨率
地面分辨率(GSD)是指每毫米所能辨别的黑白相隔的线对数(线对/毫米),通常以像元的大小来表示,一般像元越小,地面分辨率越高,信息量越大 [6]。GSD应注意首先必须根据航所摄成图的全国总幅比例尺、地形特点分布等实际自然条件而进行分析确定,通常以表1作为参考。

Table 1. Ground resolution takes the value reference
表1. 地面分辨率取值参考
2.2.2. 航行高度
航行高度由相机参数和地面分辨率决定,计算公式如下所示:
,
其中H是航行高度,单位为m;f是镜头焦距,单位为mm [7];GSD是地面分辨率,单位为m;α是像元尺寸,单位为mm [7]。
如果想要提高模型的精度,可以适当降低无人机的航行高度,但如果航行高度过低会导致像片数量过多,增加外业像控和内业建模的工作量,并且航高过低会增大安全风险 [7]。《低空数字航空摄影规范》规定:摄影分区内地形高差不应大于1/6航高,因此综合考虑建模精度、工作量、规范和安全等因素,在满足各项技术精度指标的前提下来确定相对适宜的航高 [8]。
2.2.3. 重叠度
航向重叠度是指一条航线上两张相邻像片的重复率,一般取60%~80%;旁向重叠度是指两条相邻航线上像片之间的重复率,一般取30%~75% [8]。重叠度计算公式如下所示:
,
式中pX, qY是像片上的航向重叠度和旁向重叠度(%) [8];
,
是航摄像片的航向和旁向标准重叠度(%) [8];Δh是相对于摄影基准面的高差,单位为m;H是摄影航高,单位为m [8]。由此可知,重叠度度由相较于基准面的高差
决定,
为0时,重叠度与标准值相同,因此在设计像片重叠度时要考虑高差因素,一般适当增加重叠度以满足精度要求 [8]。
2.3. 航线规划
使用大疆的DJI Pilot软件进行航线规划。设置的飞行高度要高于拍摄区域中最高建筑物25%以避免发生撞击。通过高级设置可设置采集相片的重叠率。为了提高模型质量采用的重叠率为航向重叠率80%、旁向重叠率为70%。确定重叠度、航高后计算航线距离,航线距离即为相邻两航带间隔。在航线规划完毕后,需要对场地进行勘察,选择行人较少,空旷的场地作为起降场地。
3. 实景三维建模技术
在无人机对研究区域进行数据采集后,可对采集的影像数据进行预处理。首先,检查照片质量,结合影像的POS数据、布设的像控点等信息进行空中三角测量 [9],然后通过图像几何畸变校正、图像增强、影像拼接等处理,生产三维模型。处理遥感影像的三维建模过程如图1所示。
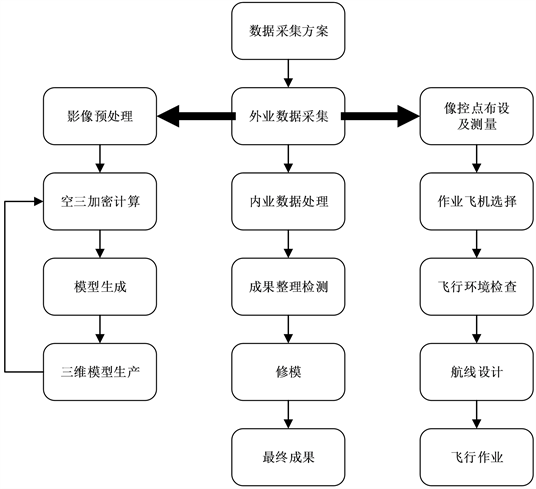
Figure 1. 3D modeling process for remote sensing imagery
图1. 遥感影像三维建模流程
目前,Context Capture、PhotoScan、DJI Terra以及Pix4Dmap-per为业界主流的倾斜摄影建模平台,通过建模速度、模型精度、工作量等方面对四款软件进行对比,如表2所示,综合各项参数后选择Context Capture和DJI Terra作为校园实景三维模型建模平台。
Table 2. Comprehensive comparison of modeling software
表2. 建模软件综合对比
4. 校园实景三维建模应用
4.1. 作业前准备
1) 现场勘察:查看并熟悉现场周围地形,记录周围较高的建筑物及地形以及可能危及飞行的地形地貌。
2) 像控点布设:
① 在条件允许的情况下可以在飞行前布设,条件不允许的情况下可以在飞行结束后布设;
② 1个加密区需要布置4个像控点(建议1平方公里最少布置5个点);
③ 采用周边布点法,控制点应能均匀分布控制整个加密区;
④ 像控点应该布置在地势变化不大的较平坦地面;
3) 航测区域划定
① 在DJI PLIOT中现场设置航测区域;
② 在划定区域时应尽量设置为形状规则的区域;
③ 避开河道、远离高压线;
4) 飞行参数设置
① 设置拍照模式,在基础设置中选择拍照模式为等距间隔拍照;
② 设置飞行高度,在基础设置中设置飞行高度;
③ 设置图像的重叠率,在DJI PLIOT中的高级设置中设置图象的重叠率;
④ 设置云台俯仰角度,在DJI PLIOT中的高级设置中设置云台俯角为−60˚;
4.2. 获取校园遥感影像
对南京信息工程大学使用大疆PHANTOM4RTK无人机和大疆MAVIC2Pro无人机作为航摄设备,PHANTOM4RTK无人机飞行器参数见表3,大疆MAVIC2Pro无人机飞行器参数见表4。使用PHANTOM4RTK无人机作业时,影像采集区域面积1394729平方米,划分为八个航摄区域。根据PHANTOM4RTK航摄设备精度要求,将航向重叠度设置为80%,旁向重叠度设置为70%。影像采集区域最高建筑110米。航线长度229公里。飞行高度设定为120米,飞行总架次52次。使用MAVIC2Pro无人机作业时,分为两个区域。航向重叠度设置为80%,旁向重叠度设置为70%。航线长度174公里。飞行高度设定为120米,飞行总架次24架次。
对东南大学成贤学院使用大疆MAVIC2Pro无人机作为航摄设备。使用MAVIC2Pro无人机作业时,无需划分区域。航向重叠度设置为80%,旁向重叠度设置为70%。航线长度83公里。飞行高度设定为158米,飞行架次12架次。
选择晴朗、无风、少云的天气进行航摄任务,在上午10点至下午2点这个时间段进行飞行作业。在无人机遥感控制器中划分测区,选择作业相机,输入上述参数,设定云台斜射角度为60度,拍照模式选择等距间隔拍照,起飞速度,航线速度均调至最高,无人机自动生成最优航摄路线、摄影间隔等,在到达拍摄地点后,先注意观察周围环境,选择空旷无人、视野开阔的起降地点。开始航摄任务,在无人机执行任务时监测无人机状态,确保航摄设备正常工作,在无人机进行飞行作业的过程中,注意光线的变化。如果拍摄时相片过曝,会导致后期处理失败的情况出现。南京信息工程大学作业任务结束后检查影像质量,PHANTOM4RTK共获得13,859幅有效影像,MAVIC2Pro共获8233幅有效影像。东南大学成贤学院作业任务结束后检查影像质量,MAVIC2Pro共获2842幅有效影像。
4.3. 校园实景三维建模
4.3.1. 数据处理
无人机飞行作业完成后检查照片的质量并删除废片。确认照片质量合格、POS信息无误、相机文件及数据点完整后,打包导入(导入路径中不可以有中文字符)。利用DJI Terra的重建功能,添加飞行器拍摄的照片进行建图,点击重建按钮,进入重建界面,点击添加照片,选中飞行器所采集到的照片并添加,照片添加完成之后,软件左侧地图将显示每张照片对应的位置点。模型格式选择OSGB格式。在参数设置完后点击开始重建。
打开ContextCapture Center Master软件前先打开ContextCapture Center Engine,该软件可运算位置信息,替空三软件建模提供运算好的位置信息。打开ContextCapture CenterMaster,新建一个工程,输入工程路径及名称(不能中文字符)导入数据,可看到位置信息、相机参数等,导入完成后检查是否有丢失、破损等如图*所示。在3D视图中可看到无人机的飞行轨迹以及每张照片对应的位置,每一个蓝色的点对应一个飞机拍摄时所在的位置,如图2所示。
4.3.2. 空三计算
航测相片测绘的地形图,需要一定数量的控制点的坐标,这些控制点如果采用常规的方式,将耗费大量的人力、财力、时间。
空三计算能够用少量的控制点,快速分析出定向和地面点问题,影像自动识别和快速进行拼接,快速检查影像质量和快速处理数据。将像素点在空间上进行定位,可进一步加密、填充并建立数字化的信息库。
导出空中三角测量计算质量报告如表5所示。
4.3.3. 三维模型重建
将图进行分割切块,导入的航空摄影区块将被规则二维网格分割为数个部分。对目标区域进行重建。首先选择WGS-84空间坐标系,然后根据电脑的配置进行切块,一般选择平面规则切块,如图3所示。导入KML文件可把多余的区域删除,也可以利用ContextCapture Center软件右侧,进行删减区域,缩短处理时间并提高处理效率。
切块完成之后,点击概要,可进行模型命名。命名完成后选择需要处理的格式,选择S3C格式,方便预览。使用WCG84坐标系,选择输出路径提交重建,等待完成即可。重建项目完成后,要先确认重建项目质量有无问题,用ContextCapture Viewer软件打开重建项目存储位置的以“.3mx”为后缀的文件。
4.3.4. 成果对比
DJI Terra重建的南京信息工程大学实景三维模型可通过LocaSpaceViewer向校内师生和社会人士展示,如图4所示。
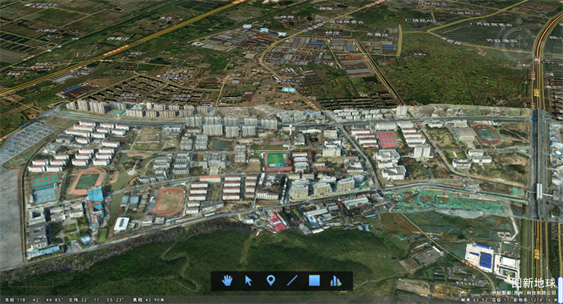
Figure 4. A model of Nanjing University of Information Science and Technology produced by DJI Terra
图4. DJI Terra产出的南京信息工程大学模型
Context Capture重建的南京信息工程大学和东南大学成贤学院的实景三维模型通过Context Capture Viewer展示,分别如图5和图6所示。

Figure 5. Model of Nanjing university of information science & technology
图5. 南京信息工程大学模型

Figure 6. Model of Chengxian college of southeast university
图6. 东南大学成贤学院模型
5. 模型质量分析
成果完成之后,我们主要采用人机交互的检查方式对各个模型的各个模块三维建模成果进行质量检查,一般对平面精度、高程精度和重投影均方差精度进行检查 [10]。
根据质量报告得知,Production2的平均地面分辨率为29.8316 mm/像素,平均重投影误差(RMS)为0.5像素,重投影误差(RMS)为0.56像素,连接点最高分辨率为0.0153米/像素,最低分辨率为0.057米/像素,中位分辨率等于0.0307米/像素,与光线的距离的(RMS)为0.1102米。Production3平均地面分辨率为32.3805 mm/像素,平均重投影误差(RMS)为1.17像素,重投影误差(RMS)为1.26像素,连接点最高分辨率为0.0129米/像素,最低分辨率为0.0521米/像素,中位分辨率等于0.0316米/像素,与光线的距离的(RMS)为0.1455米。由此可见,Production2的分辨率要高于Production3的分辨率,并且Production2的重投影误差要小于Production3的重投影误差。所以PHANTOM4RTK采集的影像所建成的模型质量要高于MAVIC2Pro采集的影像所建成的模型。报告中的详细数据如表6所示。
6. 模型精度验证
为了保证模型的可靠性,对三维模型结果进行精度验证。以各方向及平面的中误差作为精度评价指标,公式为:
(1)
(2)
(3)
(4)
式(1)~(4)中,Mx,My,Mz,M分别为X, Y, Z方向的中误差和平面的中误差;n为检算值数目。
通过影像位置的不确定性计算出影像位置与实测坐标之间的差值
,
,
,进而进行结果精度的分析与研究,以Production2为例。影像位置与实测坐标之间的差值见表7。
Table 7. The difference between the image location and the measured coordinates
表7. 影像位置与实测坐标之间的差值
将表7中的数据代入式(1)~(4),计算可得
Mx = 0.0077 m,My = 0.0062 m,Mz = 0.0147 m,M = 0.0098 m。
通过以上分析可知,X方向的最大误差为0.0123 m,中误差为0.0077 m;Y方向的最大误差为0.0097 m,中误差为0.00662 m;Z方向的最大误差为0.0072 m,中误差为0.0147 m;平面最大误差为0.5335 m,最小误差为0.0253 m,中误差为0.0098 m。通过无人机倾斜摄影技术搭建目标区域的三维模型精度较高,达到了《城市三维建模技术规范》(CJJ/T157-2010)的相关标准。
7. 结束语
通过无人机倾斜摄影技术、三维建模技术,以南京信息工程大学和东南大学成贤学院为试验区,进行实景三维建模试验,结果表明:
1) 基于无人机倾斜摄影测量技术,借助Context Capture软件构造的三维模型与真实的建筑物有着高度的一致性,其精度符合规范要求,验证了无人机倾斜摄影测量技术构建三维模型的可行性。
2) 三维模型的误差达到了《城市三维建模技术规范》(CJJ/T157-2010)的相关标准,验证了在构建三维模型中的可靠性。
3) PHANTOM4RTK所采集的影像资料建模精度更高,出现的瑕疵更少,并且PHANTOM4RTK在开启RTK之后可以免相控,对于高差较大的采集区域可以通过导入DEM文件使用仿地飞行功能,在功能方面更加齐全,相比之下缺点也明显,数传图传信号较弱,对于大面积的区域进行影像采集需要划分成多个区域,整套设备的体积较大,便携性不如MAVIC2Pro。
4) MAVIC2Pro所采集的影像资料建模色彩更鲜艳,还原度较高,但是建筑表面以及地面车辆等出现的扭曲现象明显更多,数传图传信号较好,对于大面积的区域进行影像采集不需要划分太多区域,整套设备的体积较小,便携性更好。
5) 对比不同航高的数据采集和建模效果,120米航高的精度要高于158米航高的精度,但是120米航高的作业的任务工作量要更大。
6) 对比两种软件可知DJI Terra建模速度较快,操作简单,成功率高,其效果良好,而Context Capture建模纹理更加清晰,输出格式种类更多,都可以应用于智慧化城市建设等方面,最后实现一套优质的数字化三维城市模型。
基金项目
国家自然科学基金项目(41905026);江苏省自然科学基金资助项目(BK20170945);南京信息工程大学人才启动基金资助项目(2016r028);江苏省333工程高层次人才培养资助(第三层次);中国博士后科学基金第63批面上资助(2018M631554)。
NOTES
*通讯作者。