1. 引言
随着全球人口的增长和城市化的加速,整个社会对交通的需求也在增加。尽管交通运输业的发展取得了巨大的进步,但日益增长的交通需求与人均道路面积拥有率之间的矛盾正在逐渐加剧。目前,全球公路问题和交通拥堵越来越严重 [1] [2] [3]。为解决这些问题而提出的智能交通系统(Intelligent Transportation System, ITS)、联网和自动驾驶汽车(Connected and Automated Vehicles, CAV)和车联网(Internet of Vehicles, IoV)具有广阔的发展前景 [4] [5] [6] [7]。它们的出现使车辆能够在商定的通信协议和数据交互标准下进行无线通信和交换信息。它们使车辆不再单独行动,而是与网络中的其他车辆一起行动,以实现更高的交通效率,减少拥堵时间、能源消耗和环境污染。
为了更好地了解驾驶员行为和交通动力学,交通流理论的研究越来越受到学者们关注,交通流模型一般可分为宏观模型、中观模型和微观模型,微观交通流模型则通过车辆的运动方程来解释交通动力学。最早的微观交通流模型由Pipes等人提出 [8] [9],主要思想是利用前车的速度和后车的速度差来确定车辆控制。Bando等人在1995年提出了最优速度模型(Optimal Velocity Model, OVM),来解决无限加速的问题 [10]。此后,许多研究者从不同方面对OVM进行了探索和扩展,并利用它来分析各种交通密度波,获得不同情况下的稳定条件 [11] [12] [13] [14]。有学者考虑了车辆之间的第二次接近距离,提出了广义最优速度模型 [15]。还有学者考虑本车和前车的速度差,提出了全速度差模型 [16]。考虑到车辆间的通信网络存在传输延迟等问题,有学者将车辆当前速度与某一历史时刻速度的差值引入OVM中,利用车辆自身的数据稳定车辆的运动,避免不适当的操作 [17]。
然而,各种因素导致车辆发生的数据丢失的情况很常见 [18] [19] [20] [21] [22],数据丢失会引起车辆控制模式的变化,进而导致交通流的波动。尽管如此,目前的研究大多只关注没有数据丢失的情况。很少有研究人员关注当车辆因为某些因素而丢失数据时,如何稳定车辆的控制。在对数据弥补的研究方面,有学者通过对可用数据取均值对数据集中长期缺失的数据进行弥补 [23],使交通流稳定,这说明对缺失数据合理地弥补可以稳定车辆控制,使交通流稳定。
具有自稳控制的车辆利用自身的历史速度数据让车辆运行更稳定,但是储存的历史速度数据可能会有丢失的情况,使得由于自稳控制提高的车辆稳定性消失。当车辆丢失自稳信息且无法获取时,车辆是否能采用合适的控制策略对丢失的数据弥补,让车辆具有与原来相似的稳定性?本文从数据弥补的角度研究让丢失自稳控制所需数据的车辆保持稳定的策略,具体来说,就是利用最近邻前车的相同类型的数据弥补当前车辆丢失的实现自稳控制所需要的信息,并进一步研究这种弥补策略是否能让自稳数据缺失的车辆保持稳定。
本文组织如下:在第二节中,本文将对数据弥补的场景做交通流建模。第三节分析数据弥补后车辆的稳定性。并在第四节做计算机数值仿真,验证稳定性分析结果的正确性。最后,在第五节给出了结论和结束语。
2. 基于数据弥补的自稳控制交通流建模
2.1. 自稳控制建模
自稳控制是利用车辆自身的数据进一步提高其稳定性。实现自稳控制模式,车辆需要的数据信息包括本车的速度和历史速度、本车与最近邻前车的车头距。车辆行驶过程中,这些所需的数据必须由车载传感系统实时获取,以维持自稳车辆的控制模式。自稳控制模式的模型可以表示为公式(1):
(1)
其中,V是优化速度函数,与本车和前车的车头距有关;vn是本车车速;Xn是本车当前位置;a是敏感系数;λ是自稳信息控制增益;τ是历史时间间隔。在车辆实际行驶中,其需要的自身历史速度数据来自内部储存。但是用于储存数据的设备通常都是外包的,然后组装到车上。如果车辆数据的储存器或者数据传输链路出现故障,内部储存的历史速度数据很可能无法获得甚至丢失,导致车辆无法利用自稳控制的效果让其行驶更稳定。从自稳车辆的控制模型中可以发现,当车辆无法获得自稳数据时,自稳控制将无法发挥作用,车辆的控制模型会退化为OVM模型,使得自稳控制提升的稳定性消失,让车辆的实际行驶具有额外的安全隐患。因此,有必要对丢失的自稳所需要的数据进行补偿,让车辆稳定性近似达到其数据丢失前的稳定性。
2.2. 基于数据弥补的自稳建模
车辆在实际行驶的过程中,一般都会对前方车辆跟驰,本车和最近邻前车的距离相比于其他前方车辆更近,两者行驶状态的关联程度更高。因此,本文拟用最近邻前车的信息对丢失的数据进行弥补,并研究其是否能近似达到原有的水平。具体说来,当本车的自稳数据丢失时,本文拟通过使用最近邻前方车辆的相同分类的数据,即最近邻前车自身的自稳控制信息来弥补本车丢失的数据。因此,新的交通流模型如公式(2)所示,新的交通流模型直接利用最近邻前方车辆的自稳信息
来补偿丢失的数据
,其余参数不变。图1是基于数据弥补的控制模式的方框图,H表示的是最近邻前车和本车之间数据传输的信道。最近邻前方车辆的速度和历史速度数据经过信道传输后为本车所得,不但是对丢失的数据进行了弥补,还会让本车获得最近邻前方车辆的状态(sn−1(t))。因此,这种控制模式下,本车能够获得引导车的状态,使得本车可以更紧密地跟随最近邻前车。
(2)
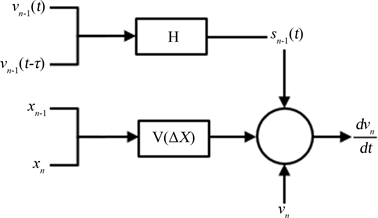
Figure 1. Block diagram of control mode based on data compensation
图1. 基于数据弥补的控制模式的框图
3. 线性稳定性分析
在第二节中,本文使用最近邻前车自身的自稳控制数据弥补了车辆丢失的自稳控制数据,并提出了新的基于数据弥补的自稳交通流模型。为了分析这种数据弥补是否能让车辆行驶的稳定性近似或者达到原有具有自稳控制时的稳定性,本文将在这一节中对数据补偿后的车辆的交通流模型进行线性稳定性分析,并与常规具有自稳功能的车辆的稳定性进行比较。
将数据弥补后的车辆的跟车模型(2)线性化,得到线性化后的微观交通流模型的数学表达式如公式(3)所示:
(3)
不难得知,
(4)
对上面两式分别做拉普拉斯变换,我们有
(5)
(6)
代入(6)到(5)中,则
(7)
经过推导,我们有如下关系式:
(8)
即传递函数为:
(9)
显然,其特征多项式为
(10)
为了推导稳定条件,进行以下转换:
(11)
当
时,
(12)
即:
(13)
对指数项进行泰勒展开,得到
因此,可以得到交通流波动可以被抑制的稳定条件:根据分散延迟反馈控制理论可知,当稳定性条件(14)满足时,交通拥堵就不会发生,否则,小干扰在传播过程中会不断被放大,直到发生交通拥堵。
(14)
为了与常规具有自稳车控制功能的车辆(控制模型如公式(1)所示)进行比较,引入其稳定性条件:
(15)
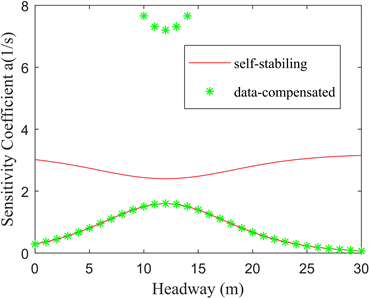
公式(14)是基于数据弥补的自稳模型的稳定性条件,与常规的自稳交通流模型的稳定性条件(15)相比,可以发现两个稳定性条件中敏感系数a具有相同的下界,但是其上界不同。为了更好对比它们的稳定性,本小节中,我们将绘制两种稳定性条件的稳定性曲线,得到数据弥补前后的稳定区域,并对稳定区域进行分析和比较。图2是绘制的数据弥补和自稳控制的中性稳定性曲线,其中,控制增益λ = 0.2,历史时刻间隔τ = 1.0。如图2所示,数据弥补前后稳定区域都存在,且两个稳定区域的下边界相同,而且自稳控制模式的稳定区域上界要低于数据弥补后的车辆稳定区域的上界,这说明使用最近邻前车自身的自稳控制所需数据弥补本车丢失的自稳数据可以让车辆行驶更容易保持稳定。
在稳定性条件(14)与(15)中,敏感系数a和
的值一般是不变的,因此,控制增益λ和历史时刻间隔τ对车辆的稳定性条件有着重要的影响。为了研究历史时间间隔τ的变化对稳定区域的影响,本文固定自稳控制增益λ = 0.2,逐渐增大τ研究稳定区域的变化。图3是控制增益固定时,不同的历史时刻间隔下的车头距–敏感系数图。如图3(a)~(b)所示,当τ增加时,敏感系数的下边界变得更低,自稳控制模式的稳定区域边界出现交汇,此时自稳控制稳定区域明显减小,自稳控制将不再稳定;但是数据弥补的控制模式稳定区域仍然存在,这意味着此时τ增加仍然能让数据弥补后的车辆保持稳定,并且敏感系数的下边界下降,意味着车辆稳定性的提高和对扰动抑制能力的增强,车辆在敏感系数a更小的情况下也能保持稳定;但当延迟τ进一步增大时,如图3(c)~(d)所示,数据弥补的控制模式稳定区域边界曲线也相互交叉,数据弥补的控制模式也不再稳定。由此可以看出,可以适当增大τ来提高车辆稳定性,但是这种提高并不是无限制的,当τ的值超出一定范围后,数据弥补控制将不能保持稳定。
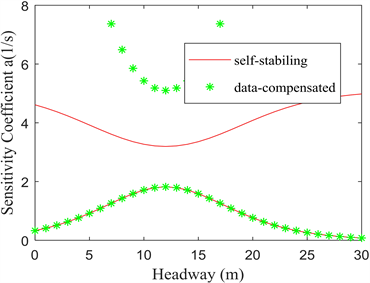
为了研究自稳控制增益λ的变化稳定区域的影响,固定历史时间间隔τ = 1.8,逐渐增大λ研究稳定区域的变化。图4是历史时间间隔τ固定时,不同的控制增益下的车头距–敏感系数图。如图4(a)~(c)所示,当λ增加时,稳定区域的下边界变得更低,但是自稳控制模式的稳定区域边界出现明显交汇,此时自稳控制不再稳定;但是数据弥补的自稳控制稳定区域仍然存在,因此数据弥补的控制模型可在敏感系数a更小的情况下达到稳定条件,意味着此时λ增加时车辆控制变得更稳定,对扰动的抑制能力更强;但图4(d)说明,当自稳控制增益λ继续增大时,数据弥补的自稳控制稳定区域边界也相互交叉,数据弥

Figure 2. The neutral stability curves of the data-compensation and self-stabilizing control. Where, λ = 0.2, τ = 1.0
图2. 数据弥补和自稳控制的中性稳定性曲线。其中,λ = 0.2,τ = 1.0
 (a) τ = 1.0
(a) τ = 1.0 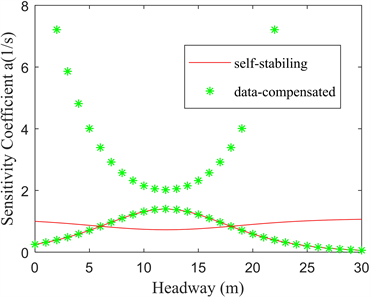 (b) τ = 1.5
(b) τ = 1.5  (c) τ = 2.0
(c) τ = 2.0  (d) τ = 2.5
(d) τ = 2.5
Figure 3. The neutral stability curves of the data-compensation and self-stabilizing control when τ increases. Where, λ = 0.2
图3. τ增大时,数据弥补和自稳控制下中性稳定性曲线的变化。其中,λ = 0.2
 (a) λ = 0.05
(a) λ = 0.05  (b) λ = 0.1
(b) λ = 0.1  (c) λ = 0.15
(c) λ = 0.15 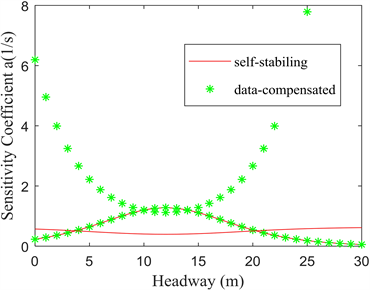 (d) λ = 0.2
(d) λ = 0.2
Figure 4. The neutral stability curves of the data-compensation and self-stabilizing control when λ increases. Where, τ = 1.8
图4. λ增大时,数据弥补和自稳控制下中性稳定性曲线的变化。其中,τ = 1.8
补的控制模式也不再稳定。由此可以看出,可以适当增大λ来提高车辆稳定性,但是这种提高并不是无限制的,当λ的值超出一定范围后,数据弥补控制将不能保持稳定。
4. 数值仿真实验
本节将对本文提出的使用最近邻前车数据弥补丢失数据的自稳交通流模型进行数值仿真,并研究不同的控制增益和历史速度间隔对基于数据弥补的自稳控制交通流模型稳定性的影响。第三节的理论分析说明,在控制增益λ和历史时间间隔τ保持不变时,数据弥补和自稳控制的交通流模型稳定性条件中敏感系数a具有相同的下界,但是其上界不同,并且可以适当增大λ和τ来提高车辆稳定性,但是这种提高并不是无限制的,当λ的值超出一定范围后,数据弥补控制将不能保持稳定,本节将通过数值仿真验证理论分析结果。
4.1. 仿真设置
在本节中,对所提出的数据弥补跟车模型进行了数值模拟,以验证稳定性分析的正确性。如果在接下来的模拟中没有指定,则敏感系数、历史时间间隔和自稳信息增益系数默认为a = 1.4,τ = 1s,λ = 0.7。最优速度函数方程为:
仿真环境设置是一条环形公路,长度是1200米,100辆车沿车道均匀分布。所有车辆的期望车距都是12 m,期望车速度是
。这些车辆在两条车道上的初始位置分别为0,12,24……所有这些车辆都以期望速度、零加速度和预期的车头距平稳行驶,在行驶满一圈后继续新的一圈,并且位置从0开始。为了研究数据弥补控制对交通流扰动的抑制能力,控制增益和历史时间间隔对交通流稳定性的影响,在0时刻,在第50辆车的位置加入小扰动:
在仿真参数、初始化以及小扰动设置之后,接下来将通过数值仿真来研究数据弥补控制对于交通流稳定性的影响。在车辆经过足够长时间的运行后,通过观察车辆速度的波动来反映此时交通流所处的状态。如果车辆速度波动较为平缓甚至没有波动,那么认为此时的交通流是稳定的;反之则交通流不稳定。
4.2. 弥补性能仿真与对比
要研究基于数据弥补的自稳控制模型对交通流的稳定效果,需要用相同模型参数情况下不考虑数据弥补时交通流的状态来对比验证数据弥补是否具有稳定交通流的效果,并且和具有自稳控制并没有发生数据丢失时交通流的状态对比,以研究数据弥补是否完全弥补了因为数据丢失而失去的稳定性。图5是具有自稳控制的、自稳所需数据丢失后进行了数据弥补的自稳控制的以及自稳所需数据丢失后没有进行数据弥补的三种车辆速度波动随时间的演化过程。图5(a)展示了没有数据丢失时具有自稳控制的车辆的速度波动随时间的演化过程,从图5(b)可以看出,车道内车辆丢失了自稳信息后,用最近邻前车的自稳信息弥补时,车辆的速度波动始终很小,交通流可以保持稳定。将速度波动的全程与图5(a)相比不难看出,两者的速度波动演化过程十分接近,这说明本文提出的数据弥补很好地弥补了因为数据丢失而失去的稳定性。从图5(c)可以看出,如果不做任何数据弥补,一开始产生的小扰动并不能得到有效的抑制,车辆速度的波动的颜色随着车辆运行不断变深,这说明车辆速度波动随着时间越变越大,车流不能保持稳定。由此可以得出结论,用最邻近前车的自稳信息弥补丢失的自稳控制所需要的信息,对数据丢失的自稳车辆的控制起到了稳定作用,并且稳定程度与数据丢失前十分接近。因此,当其自身的自稳所需信息不能得到时,可以用最近邻前车的自稳信息弥补失去的数据,弥补因为数据丢失失去的稳定性。
 (a) Self-stabilizing(b) Data-compensation
(a) Self-stabilizing(b) Data-compensation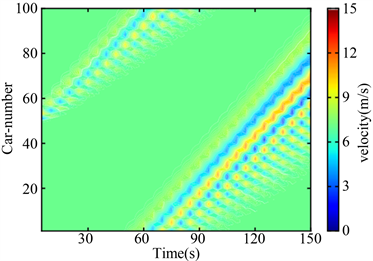 (c) Without data-compensation
(c) Without data-compensation
Figure 5. Time evolutions of the velocities of vehicles in different conditions
图5. 不同情况下车辆速度的时间演化图
4.3. 模型参数对弥补性能的影响
第三节的理论分析表明,可以适当增大控制增益λ和历史时刻间隔τ来提高车辆稳定性,但是这种提高并不是无限制的。为了通过仿真验证这一点,本小节将用与上一小节相同的仿真实验来研究小扰动在交通流中的传播情况,进而判断交通流是否稳定。
4.3.1
. 历史时间间隔对弥补性能的影响
为了清楚直观地显示历史时刻间隔τ对交通流稳定性的影响,并且不被其他参数的变化干扰,固定敏感系数a = 1.4,并保持控制增益λ = 0.7不变,逐步增大历史时刻间隔τ通过与之前相同的仿真实验研究数据弥补后交通流稳定性的变化。图6为不同历史速度时间间隔下,交通流中小扰动的传播情况。对比图6(a)和(d)可以看出,丢失数据用最近邻前车数据弥补后,车流的速度波动始终比没有数据弥补从而导致退化为OVM模型的车流的速度波动小,这说明数据弥补提高了数据丢失的车辆的稳定性和对小扰动的抑制能力;从图6(a)~(c)可以看出,随着τ的逐渐增大,图中速度波动的颜色先变浅再变深,即速度波动幅度先变小再变大,这说明交通流对小扰动的抑制能力从变强到变弱,交通流从稳定变得不稳定,这一仿真结果和理论分析结果完全一致,说明了本文理论分析结果的正确性。
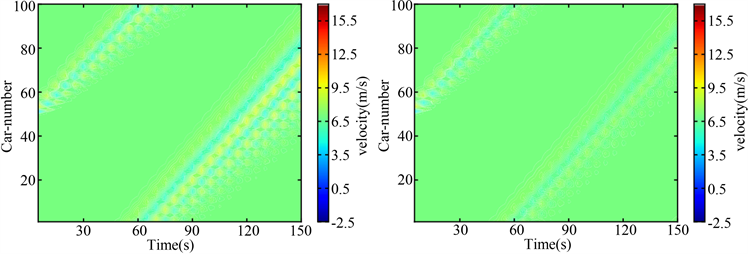 (a) τ = 1 (b) τ = 2.5
(a) τ = 1 (b) τ = 2.5 (c) τ = 5 (d) τ = 0 (OVM)
(c) τ = 5 (d) τ = 0 (OVM)
Figure 6. Time evolutions of the velocities of vehicles when τ increases
图6. τ增大时,车流速度随时间的演化过程
4.3.2
. 自稳控制增益对弥补性能的影响
为了研究自稳控制增益对弥补性能的影响,固定敏感系数a = 1.4,并保持历史时刻间隔τ = 1s不变,逐步增大控制增益λ来研究交通流中扰动的传播和稳定性的变化。图7展示了λ逐步增大时受到小扰动影响后,车流速度随时间的演化过程。对比图7(a)和图7(d),可以看出前者的速度波动相对后者小很多,
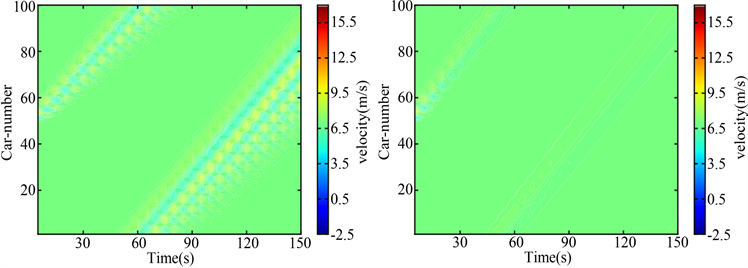 (a) λ = 0.05(b) λ = 0.2
(a) λ = 0.05(b) λ = 0.2 (c) λ = 0.7 (d) λ = 0 (OVM)
(c) λ = 0.7 (d) λ = 0 (OVM)
Figure 7. Time evolutions of the velocities of vehicles when λ increases
图7. λ增大时,车流速度随时间的演化过程
这说明弥补丢失的自稳控制所需数据,让失去自稳数据的车辆对小扰动的抑制能力明显提高,车辆的对小扰动的稳定性相对数据弥补前更强;对比图7(a)和图7(b),可以发现继续增大λ让交通流中速度波动的颜色变得更浅,这说明交通流的稳定性和对扰动的抑制进一步变强;直到λ增大到0.7时,由图7(c)可以看出,交通流稳定性明显下降,并变得极不稳定。显然,图7的仿真结果与前文的稳定性分析结果一致,这说明了本文理论分析结果的准确性。
5. 总结与展望
本文利用最近邻前方车辆的自稳控制所需要的数据来补偿车辆丢失的自稳控制所需数据,并提出了新的基于数据弥补的自稳控制交通流模型。通过稳定性分析,研究了这种数据补偿的自稳控制模式是否可以让交通流保持稳定,并且与自稳控制交通流模型的稳定性相比较,研究了控制增益和历史时间间隔对数据弥补后车辆稳定性的影响。数值模拟验证了数据弥补能提高车辆稳定性的同时,进一步验证了控制增益和历史时间间隔对数据弥补后车辆稳定性的影响,并且与理论分析结果相吻合。本文提出的数据补偿方案,是通过和最近邻的车辆之间相互通信达到数据弥补的目的。最近邻车辆与数据丢失的车辆之间通信信道的物理距离更短,信道的信号衰落幅度更小,因此信号传输更加稳定,利于信号和数据的接收。
未来的工作可以研究前方其它车辆的自稳信息是否可以用于数据弥补,从而在自稳控制所需数据丢失的情况下,仍然可以保持交通流的稳定。对于具有自稳控制功能的车辆来说,在自身自稳控制所需数据无法获得的情况下,使用最近邻前车的自稳数据弥补,是一种避免因自稳信息丢失导致车辆稳定性下降的具有应用前景的方法。
基金项目
这项工作得到了国家自然科学基金的资助,资助号为61773290。