1. 引言
随着无人作战模式的快速发展,重载无人机在现代战争中发挥着越来越重要的作用,适用于各种突击侦察、掩护、打击等作战场景,与普通无人机相比,能承载更多重型、大型武器,拥有更长的航程。重载无人机能对目标打击的首要前提是能准确识别目标,普通单一手段识别效果不理想,具有局限性,需要采用多识别手段来提升识别目的的可靠性,这里引用粒子群算法。目前采用的设备包括:光电、红外、雷达探测设备,这三种设备在不同的距离、天气、抗干扰能力方面有不同的特点。通过粒子群算法,计算雷达、光电、红外的识别手段,计算被打击对象的优先等级,确定优先被打击对象。
目前国内通过识别方法来准确识别打击对象的研究还不够完善,本文将引入粒子群算法来提高目标对象的识别精度。文献 [1] 秦清,徐毓建立了通过多种手段来识别低小目标的可行性和可靠性。文献 [2] 李良福,陈卫东,等基于多维图像融合的目标识别技术,从而提高目标识别的能力。文献 [3] 王玉杰,唐钟南,等对于集群攻击作战运用及多机协同控制器的设计具有一定的参考意义。文献 [4] 朱霸坤,朱卫纲,等通过Dyna-Q算法的干扰决策算法对雷达目标识别具有重要意义。文献 [5] 殷宗迪,何平等设计了一种对无人机的值守光电告警系统,该系统能输出光电信息和红外图像信息,对输出的目标信息进行自动识别。文献 [6] 张瑞鹏,冯彦翔,杨宜康针对新目标发现导致的初始计划失效问题,设计了一种基于匹配策略的局部任务重分配方法能有效解决异构多无人机同时打击场景中的任务分配问题。文献 [7] 鲁希团,吕慧等利用DM642的强大数据处理能力,对目标的空间坐标进行转换,改变数据库内存将位置坐标添加到视频图像,从而获得目标定位。文献 [8] 张云飞,林德福,等提出多的协同路径规划算法,在不降低无人机目标分配规划效率前提下,实现无人机对多目标协同打击,增强了无人机对目标的打击能力。文献 [9] 石文君,刘万锁针对无人机智能打击构建的图谱,能够结合战斗指令和环境制定具体的打击方案。文献 [10] [11] [12] [13] 基于多代理强化学习对无人机网络资源分配。文献 [14] [15] [16] [17] 通过自动时空正则化实现无人机的高新能视觉跟踪,并对无人机视角下的小目标进行检测。
2. 打击目标识别协同模型
多目标识别协同模型包括打击目标和打击策略两种对象。
2.1. 打击目标模型
无人机探测装置雷达、红外、光电获得的信息包括:目标地理信息、属性信息。通过雷达得到目标速度、运动方向从而获得坐标位置信息;后台数据库通过信息匹配确认目标对象。
无人机在城市巷战环境打击对象包括敌人、车辆;在野外作战打击对象包括敌人、车辆、碉堡。根据目标是否携带危险武器、炮口朝向、位移方向、速度和温度等状态来计算出打击对象的危险等级,依据危险等级作为优先打击对象。
从探测装置获取打击对象位置信息X、Y、Z分别为坐标和高度;Vx、Vy、Vz代表打击对象速度;
、
、
代表打击对象加速度,则t时打击对象状态为
。
敌人、车辆、碉堡,不同对象的属性不同,令wm为打击对象敌人的危险系数;敌人有站立、蹲下、卧倒三种姿势,分别为Sm,姿势危险系数分别为Sm = 1、2、3;距离用L表示,Lm为距离危险系数,
,以第一次探测到敌人距离为基准,距离危险系数Lm = 5,远离无人车Lm按距离逐渐减少,处于无人车探测距离外Lm = 0,靠近无人车Lm按距离逐渐增大;敌人朝向危险系数为Om,
,面朝无人车朝向危险系数Om = 10,背朝无人车朝向危险系数Om = 1;携带武器杀伤力用Fm表示,按杀伤威力危险系数
,不携带武器无杀伤力Fm = 0,携带火箭筒杀伤力最大为Fm = 10。
则打击对象敌人的危险系数
。无人机、人模型如图1。
wc为打击对象车辆的属性,距离用L表示,Lc为距离危险系数,
,以第一次探测到敌人距离为基准,距离危险系数Lc = 5,远离无人车Lc按距离逐渐减少,处于无车辆探测距离外Lc = 0,靠近无人车Lc按距离逐渐增大;车辆行驶朝向危险系数为Oc,
,驶入无人车朝向危险系数Oc = 10,背离无人车朝向危险系数Oc = 1;携带武器杀伤力用Fc表示,按杀伤威力危险系数
,不携带武器无杀伤力Fc = 0,携带反坦克炮杀伤力最大为Fc = 10;炮口朝向危险系数
,
,炮口朝向无人车Rc = 180,炮口背朝向无人车Rc = 0。
则打击对象车辆的危险系数
。无人机、车模型如图2。
wb为打击对象碉堡的属性,距离用L表示,Lb为距离危险系数,
,以第一次探测到敌人距离为基准,距离危险系数Lb = 5,按距离逐渐减少和增大,处于无车辆探测距离外Lb = 0;碉堡内携带武器杀伤力用Fb表示,按杀伤威力危险系数
,不携带武器无杀伤力Fb = 0,携带反坦克炮杀伤力最大为Fb = 10;碉堡口朝向危险系数
,
,炮口朝向无人车Rb = 180,炮口背朝向无人车Rb = 0。
则打击对象碉堡的危险系数
。无人机、碉堡模型如图3。
打击对象为
。
n为对象危险函数,对象危险等级表示为
,N值越大代表危险等级越高;危险等级越高打击越优先。则打击对象表示为
。
2.2. 识别方法模型
探测装置的探测效能不同,所得到的对象信息也不同,需要对探测装置探测范围、探测距离、视野盲区及探测速度进行考虑。如白天能见度高的环境下,光电探测性能大于红外;如雪天、雾天、雨天、晚上等能见度底的环境下,红外探测性能大于光电;如车等打击对象移动速度较快,雷达探测性能比较好。因此分配识别手段要体现环境对策略分配的影响因素。
探测装置有探测距离、俯仰角、方位角、俯仰角速度、方位角速度以及不同场景下不同对象的识别权重。设L为探测装置的探测距离;CA为探测装置的俯仰角范围
;CB为探测装置的方位角范围
;天气、环境温度、场景、及打击对象的运动状态都会影响探测装置的探测权重,P、I、R分别表示光电、红外、雷达探测装置,Pwx、Iwx、Rwx分别为光电、红外、雷达对不同识别对象的权重。则识别手段可以表示为S(L, CA, CB, Pwx, Iwx, Rwx)。
3. 目标识别手段分配算法
目标识别手段分配算法设计的关键在于用匹配原则找到目标,以及对识别手段的效能评估。
3.1. 算法优化目标
目标识别和分配手段求解中的优化目标:
1) 环境分配原则:雪天、雾天、雨天、晚上等能见度低的环境下,红外识别分配效能权重大;白天、视野开阔的环境下,光电识别分配效能权重大。
2) 对象分配原则:对象移动速度快,雷达识别分配效能权重大;对象温度高,与环境温度明显区分,红外识别分配效能权重大。
3) 在城市巷战和野外作战,根据实际情况指定分配权重O,可以实现人工分配效能权重。对没一种效能权重计算探测性能U,确定分配效能权重的可靠性,使分配的识别手段的可靠性逐步提高。
(1)
3.2. 基于粒子群的目标识别和目标识别分配手段寻优
普通单一手段识别效果不理想,具有局限性,需要采用多识别手段来提升识别对象的可靠性,粒子群算法设计简单,收敛速度快,适用于这类问题的求解。目前采用的设备包括:光电、红外、雷达探测设备,这三种设备在不同的距离、天气、抗干扰能力方面有不同的特点。通过粒子群算法,计算雷达、光电、红外的探测性能,为识别目标提供不同的策略。
1) 基本粒子群算法
粒子群优化算法是通过模拟鸟群觅食行为而发展起来的一种基于群体协作的随机搜索算法。模拟鸟群的捕食行为。一群鸟在指定区域随机搜索食物,在这个区域里只有一块食物。所有的鸟都不知道食物在哪里。但是他们知道当前的位置离食物还有多远。因此可以指导找到食物的最优策略是通过最简单有效的方法是搜寻离食物最近的鸟的周围区域。
在粒子群算法中,每一个优化问题的解被看作搜索空间的粒子。令V为粒子速度,
和
是[0, 1]之间的随机数,为搜索加入随机扰动,K1和K2为学习因子,一般为2,
为惯性权重,则基本粒子群进化方程为
(2)
(3)
其中每个粒子代表问题的一个解,迭代过程中,粒子通过跟踪个体极值Pbest和全局极值Gbest自我更新,Pbest为粒子本身找到的最优位置,Gbest为整体目前找到的最优位置。
2) 粒子的定义
采用如下方式把实际应用问题抽象为算法中的粒子:假设有n个目标对象
,m个识别方法
,目标、识别方法的关系为
,
目标和识别方法如表1。

Table 1. Objectives and identification methods
表1. 目标和识别方法
目标、识别方法表示为:以S的二进制数值
作为粒子群算法的粒子。计算式(2)和(3)来迭代方程。约束条件:每种识别方法分配的目标有最大限度
。
3) 效能函数的设计
根据识别方法和目标分配方案,式(1)计算探测性能,U值越大表明可靠性越高。
4) 算法流程
初始化,t = 0,设置V(t) = 0,K1 = 0,K2 = 0,μ = 0.5,
;
根据式(2)计算V(t + 1);代入式(3),得到新的粒子S(t + 1);
将S(t + 1)代入(1)计算新的探测性能U(t + 1)。若U(t + 1) > Gbest,则U(t + 1) = Gbest。
4. 实现过程
雷达利用探测的回波得到对象的时域、频域、极化域的雷达对象特征信息,通过这些信息对来判定对象类型、属性、威胁等级。雷达能够获取的对象特征信息包括高度、速度、加速度、显轮廓、多普勒特性、低分辨率起伏特性,根据对象运动、大小等特性的变化来对对象类型识别,同时也能对目标的时间序列获取其几何特征和形状特性展开目标识别。近年来雷达识别技术越来越强大,能够对一般的目标型号和目标个体来识别。可以通过目标一维距离像特征获取目标的大小、形状等信息从而将雷达的目标识别等效为一个图像识别问题。
光电识别主要由两部分组成:分别是红外采集发送软件和服务器软件,图像数据采集流程图如图4。
光电识别系统主要是接收控制器转发的由雷达获得的目标信息,从而对转台、可见光相机、红外相机控制来探测目标。可见光相机得到目标相关信息后通过卷积神经网络算法来对目标识别,同样红外相机通过TopHat算法对比较复杂的目标检测,对比两种方法对目标实时识别和有效跟踪,最后将目标识别结果及对目标的跟踪视频发送到中央确定危险等级,给出打击策略。总识别流程如图5。
识别流程完成,将敌人、车辆、碉堡的不同属性作为粒子群算法的粒子。敌人的粒子分别是Sm、Lm、Om、Fm;车辆的粒子为Lc、Oc、Fc、Rc;碉堡的例子分别为Lb、Ob、Fb、Rb。
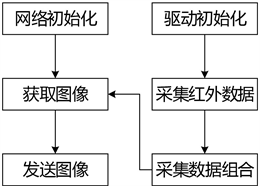
Figure 4. Image data acquisition process
图4. 图像数据采集流程
5. 实例仿真
根据实际需求,在一定时间出现的目标数,不会超过表中的最大值。目标数量,识别方法数量增加时,算法得出目标的平均时间、可靠性如表2所示。
不同目标数、识别方法下算法平均识别时间和可靠性如表2所示。
通过仿真结果可以明显看出,普通单一识别方法效果具有局限性,需要采用粒子群算法的多识别手段来提升识别对象的可靠性。
随着战场目标数量的增加,识别方法太少,识别平均时间会显著增加,可靠性显著降低;目标数量一定,随着识别方法的增加,虽然使得识别平均时间变长,但能提高识别的可靠性,这样为指控中心提供了有效的打击策略依据。
Table 2. Target number, recognition method, average recognition time and reliability
表2. 目标数、识别方法算法平均识别时间和可靠性
6. 结束语
在真实战场环境中,打击对象的精准识别,对现代战争具有重要意义。为此,本文结合粒子群算法来对识别方法分配,针对目标类型和数量多的情况,根据危险等级提供打击策略,能有效提高识别精度并给出打击策略,为指控中心提供有效的打击策略。提出的基于粒子群算法的重载无人机地面打击策略在无人机指控系统中能成功应用。
参考文献
NOTES
*通讯作者。