摘要: 我国在船舶工业、港口以及各种船舶的拥有数量方面居于世界前列,但目前船舶尾气排放实测研究严重缺乏。目前,海事部门在现场执法过程中主要对燃油质量、记录台账等要求的内容进行检查,并根据实际情况确定是否进行燃油抽样测试的方式实现对船舶燃油硫含量的监管,该方法存在检查目标比较随机、针对性不强的缺点,而且登船检查成本较高,检查数量较少、效率相对较低。因此,设计了基于无人机的船舶尾气监测系统。监测系统由旋翼无人机自主飞行系统、机载气体采样系统、地面通讯控制系统和无线传输系统组成。地面通讯控制系统使用LORA模块与PC端进行数据传输,地面通讯控制系统基于建立的排放数学模型,通过Labview软件编程进行数据处理。对两种型号的船用发动机进行排放监测,监测数据结果显示,该系统能够快速监测船舶尾气中的SO
2浓度,并通过数学模型计算得出燃油中的含硫量和NO
x比排放,与原有的燃油抽取检测方式相比,更具有针对性和实时性。
Abstract:
It is clear in our county that the number of ships owned is very high in the world, but there is a severe lack of field research on ship exhaust emission. Maritime department mainly checks fuel quality and record in the process of law enforcement, then determines whether using fuel sampling to realize the supervision of sulfur content in ship fuel oil, according to the actual situation. There are some practical disadvantages to this approach, including poorly targeted, random in check target, higher cost, small number of checks, low efficiency. Therefore, a ship exhaust monitoring system based on unmanned aerial vehicle (UAV) is designed in this paper. The monitoring system is composed of autonomous flight system, airborne gas sampling system, ground communication control system and wireless transmission system. The ground communication control system, which is rely upon the LORA and PC for data transport, processes the data by LabVIEW based on the mathematical model of emission is established. The monitoring data showed that the system can quickly monitor the concentration of SO2 in ship exhaust gas and calculate the sulfur content and NOx brake emission by mathematical model. Compared with the original fuel sampling method, it is more targeted and real-time.
1. 前言
船舶尾气排放是港口和近海岸地区空气环境污染的主要来源之一,已经成为继机动车排放污染和工业排放污染后的第三大空气污染来源。我国港口多集中在长三角、珠三角、环渤海等人口稠密地区,船舶尾气排放给沿海居民的健康和生活带来了严重的影响。随着我国经济的不断正常,各大港区的船舶运输总量不断提高,船舶直接排放的NOx和SO2等污染物对环境和气候条件造成了较大的影响。为应对当前节能减排的国际形势,国内部分港区开始建立船舶尾气排放区。珠三角、长三角、环渤海(京津冀)水域船舶排放控制区实施方案 [1] 中对船舶在排放控制区内的核心港口区域靠岸停泊期间和海船进入内河控制区时使用硫的含量都提出了不同要求。经调研,海事部门在现场执法过程中主要对燃油质量、记录台账等要求的内容进行检查,并根据实际情况确定是否进行燃油抽样测试的方式实现对船舶燃油硫含量的监管,改方法存在检查目标比较随机、针对性不强的缺点,而且登船检查成本较高,检查数量较少、效率相对较低。
对船舶尾气的监测可分为固定的岸基嗅探法和移动的机载嗅探法这两大类。岸基嗅探法 [2] 是一种被动的测试方法,主要通过风将船舶尾气吹拂到检测地点,因此风是决定该方法是否有效的重要参数,同时也决定了监测地点和被测船舶之间的位置关系。通常,被测船舶只可能位于上风向,同时风速的大小也是决定检测是否有效的重要参数,风速过大会导致船舶尾气被过渡稀释,风速过小则会导致船舶尾气无法被送至监测点,两者均会导致无法监测出尾气。因此,岸基嗅探法适合于船舶必经的狭长航道附近的岸、桥、灯塔等靠近航道的位置。
机载嗅探法是一种主动追踪船舶尾气的方法,主要利用飞行器运行速度快、运行位置灵活、检测效率高的优势,适合开阔海域的巡航式检查,例如船舶排放控制区附近。相比岸基嗅探法,机载嗅探法具有明显的优势,目前欧洲许多国家在排放控制区监管方面已经开始使用“固定翼飞机 + 气体传感器”的监测手段,通过固定翼飞机搭载高精度气体检测传感器或气体采集装置,在排放控制区内对船舶尾气进行监测。Mellqvist和Berg开发了远程监控系统,目的在于控制单个船舶是否遵守国际海事组织关于减少硫含量和NOx排放的法规 [3]。在早期的试点项目中,Mellqvist等人开展了识别严重污染船舶的项目 [4],在2006年至2008年间组装了原型测量系统,该系统在一个船航道的下风向上安装在固定地点上,分析吹过该站点的船舶烟气,并从烟气中直接获得船舶的燃料硫含量。随后,相同的系统安装在瑞典海岸警卫队的KBV-583飞机,然后在波罗的海多次试飞测试 [5]。同时,该系统也在北海的海豚直升机和鹿特丹港航道的地面站上使用,作为欧盟项目的一部分,旨在测试船舶监视技术 [6]。瑞典Chalmers大学 [7] 等人研究利用机载嗅探法监测了船舶排气污染物,用于监测在港口区域违法使用重硫油的船只,并且在两期项目的支持下 [4],成功研发了船舶排放监测飞机。其嗅探器系统基于几种最先进的气体和颗粒测量仪器,经过改造后具有响应快、重量轻、体积小和现场鲁棒性强的特点,还增加了AIS接收器、GPS传感器、风传感器、互联网调制解调器和控制电子设备。并开发出一种定制的软件,可以在地图上绘制船只的位置,自动识别船只的羽流并计算排放系数。德国和比利时等国家也成功应用机载嗅探法执法因燃油硫含量超标而导致尾气排放超标的船舶。2010年10月,意大利海岸警卫队通过无人机搭载二氧化碳和二氧化硫测试设备对10艘船舶开展尾气测试试验 [8]。2014~2016年,欧盟成员国芬兰、瑞典、比利时、荷兰、丹麦和德国成立了Compliance Monitoring for Marpol Annex VI (CompMon)联盟,针对排放控制区内船舶环保执法的要求在船舶密集区域配备了3架监测飞机。数据显示,在排放控制区内近95%的船舶使用了低硫油,但是大约13%的船舶在离开排放控制区时会过早的切换使用高硫油 [9]。2014年,《Atmospheric Measurement Techniques》 [10] 期刊探讨了当前世界范围内正在研究的各种船舶尾气监测技术,其主要目的就是辅助执法,识别排放超标的船舶。目前,我国在利用机载嗅探法监测船舶尾气方面的研究较少,主要为船舶污染排放清单的制定提供数据支持,鲜有在船舶尾气排放环保监视与执法方面的研究。
监视船舶在沿海控制区域低硫油的切换对船舶排放至关重要,有必要提前规划。国外在2012年即开始在排放控制区内的硫含量进行控制,而我国起步相对较晚(2017年) [11]。船舶排放控制区政策的有效实施与落地,需要强有力的监管和技术手段作为保障,因此,本文的研究目的是开发和进行新仪器的现场测试,基于气体传感器和合理的假设,对船舶尾气排放(SO2和NOx)进行经济有效的实时在线监控。
2. 无人机监测系统设计
环境监测系统包括旋翼无人机自主飞行系统、机载气体传感器(二氧化硫(SO2)、二氧化碳(CO2)、氮氧化物(NOx)、碳氢化合物(THC)和一氧化碳(CO))、地面通讯控制系统、无线传输系统等系统框图如图1所示。
监测系统由无人机移动平台和地面通讯模块组成,无人机移动平台的整体结构设计如图2所示,采样软管、汽水分离器、过滤器、单向阀、抽气泵和气体检测模组(SO2、NOX和CO2)依次串联。气泵采用德国THOMAS微型真空泵,能够在高温和高湿环境中工作,SO2传感器采用支持RS485接口,量程为0~2000 ppm,CO2采用GRG5H型红外二氧化碳传感器,支持485输出,NOx传感器测量范围为0~2000 ppm,支持485输出。
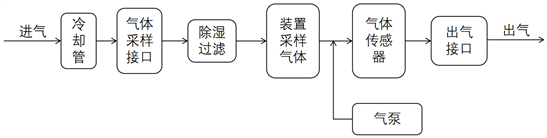
Figure 2. Structure design of the system
图2. 系统整体结构设计
无人机平台必须具有大载重量和长续航能力,是由主飞行器模块、云台相机模块、锂电池模块、地面遥控器模块、运输箱模块和软件系统组成。尾气监测系统挂载于无人机机架下,通过地面控制飞行路线对船舶尾气进行采集、储存和出来,同时无人机的机载相机可以将拍摄到的现场画面传输至遥控器端地面监视器。为满足以上要求,无人机选型为大疆MATRICE 300RTK机型,该机型集成先进的飞控系统、六项视觉系统、六项红外感知系统和FPV摄像头,兼容全向避障雷达、并具备自动返航、障碍物感知、精准复拍和目标获取等飞行功能,内置AIRSense可检测周围航空器情况,以保障飞行安全。机身结构在飞行过程中防护等级可达IP45。机身配备夜航灯便于在夜间识别飞行器。其基本参数表1所示:
Zenmuse H20云台相机搭载边角及广角相机,科在高倍率变焦画面与广角画面之间快速切换,在广角画面中搜寻到目标船只后,快速切换至高倍率变焦画面进行细节观察。同时,该相机搭载激光测距仪,可在巡检时提供目标船只的距离以及位置信息,以快速定位。其基本参数如表2所示:

Table 2. Basic parameters of Zenmuse H20 gimbal camera
表2. Zenmuse H20云台相机基本参数
船舶尾气监测系统主要由尾气传感模组、供电系统、数据处理与传输系统、GPS模组、无人机控制端软件系统以及服务器端软件系统组成。能够将监测所得的尾气监测数据以及GPS数据等通过GPRS传输至数据服务器端。检测模块内部包含了一块模组底板,最多可安插5个常用气体检测模组,预留1个粉尘检测模组接口(需配合粉尘传感器专用底板使用)。5个气体模组以及粉尘模组既可独立工作,也可并联工作,模组底板通过内部RS485接口读取5个气体模组和粉尘模组的实时浓度,并建立一个实时数据数组,外部设备可通过RS485调试接口以ModbusRTU协议格式来读取这些浓度数据和使用特定串口软件下载历史浓度记录,气体检测模组外部接口如图3所示。
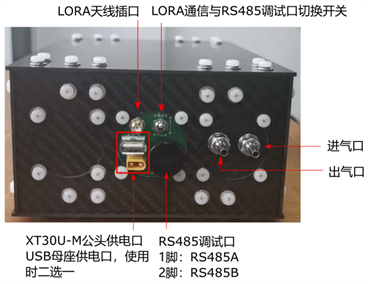
Figure 3. External interface of gas detection module
图3. 气体检测模组外部接口
图4中传感器底板与各传感器之间的通讯线连接示意图,以及使用LORA模块与PC端进行数据传输的连线示意图。设备安装在无人机上后,可在LORA模块通信范围内(目前配的模块通信距离为空旷环境8KM),在电脑的USB口连接USB转485转接器,并连接LORA模块,此LORA模块与气体检测仪模组设备中的LORA模块的通信,因此可运行读取浓度值软件读取气体检测模组中的各个传感器的实时浓度数据,图5是电脑与气体检测模组直连示意图。

Figure 4. Connection diagram of LORA communication
图4. LORA通讯连接示意图

Figure 5. Connection diagram of computer and gas detection module
图5. 电脑与气体检测模组直连示意图
3. 燃油含硫量和NOx比排放数学模型及其处理系统
硫含量的测量主要原理是假设SO2与CO2的比例与燃料中的硫与碳含量成正比,因为柴油机燃烧效率较高,发动机缸内燃烧接近完全燃烧过程,所以认为燃烧的主要污染物是SO2和CO2两种。柴油中的碳含量约为87%,因此,标准化为87%的硫碳比直接对应于硫与燃料的比(Tuttle等人,1995)。除SO2外,废气中的其他硫种类包括SO3和SO4,但研究表明 [12],此类硫化物仅占硫含量的百分之几。对于废气中的碳(除CO2外),存在气态CO和颗粒相,但上述研究表明,颗粒物占碳的比例小于1%,而另一项研究表明,CO的占比小于0.05% [13]。这表明硫含量测量的主要假设是具有稳定性的。基于以上假设,可推导出公式(1)。
(1)
IMO法规中NOx对应于与NO2,因此假设所有NOx均对应于NO2。要将NOx排放值转换为比排放量(g/kwh),必须包括特定发动机的燃油消耗率。大型船舶(油轮、集装箱船)通常使用的低速发动机,燃油消耗率在160到170 g/kWh之间 [4]。在中等冲程发动机中,例如客运渡轮的燃油消耗率约为180 g/kWh [14]。但实际上燃油消耗率要更高,例如,在鹿特丹最近的一项研究中,一艘配备中等冲程发动机的渡轮的燃油消耗率约为250 g/kWh [15]。基于以上文献的参考,我们假设船舶的燃油消耗率为200 g/kwh,对应于船舶的假设平均值,因此可推导出NOx比排放,如公式(2)所示。
(2)
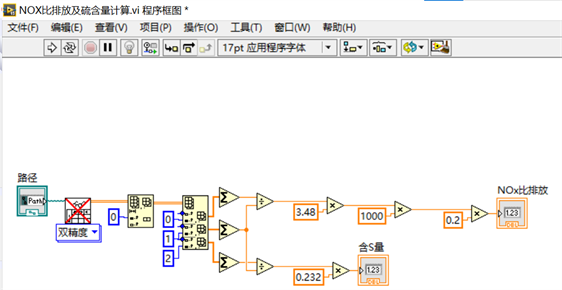
基于燃油含硫量和NOx比排放数学模型建立数据采集分析系统,采用Labview软件自编程序,将采集的NOx,CO2和SO2数据输入程序中运行,即可根据数学模型计算得出NOx比排放和含硫量。数据采集分析系统前面板和分析界面如图6所示。
 (a) Front Panel
(a) Front Panel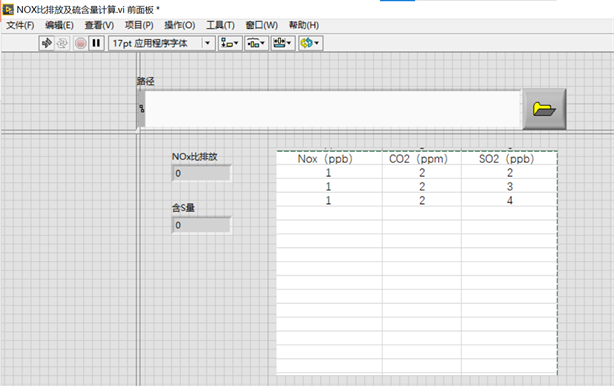 (b) Data analysis interface
(b) Data analysis interface
Figure 6. Front panel and analysis interface of data analysis system. (a) Front Panel; (b) Data analysis interface
图6. 数据分析系统前面板和分析界面。(a) 前面板;(b) 数据分析界面
4. 测试试验
测试机型选取广州市XX柴油机厂A和B两个型号船用发动机,功率分别为2427 kW和4400 kW,试验工况如下表3所示。
如前所述对于所有测量假设燃油消耗率为200 g/kwh,不同工况的排放单位为g/kWh。CO2与SO2的实时监测排放数据如图7所示,数据采集时间为180秒。采集的数据通过数据处理系统计算得出两个机型在不同工况下的硫含量,如图8所示。油品报告显示,试验用油硫含量低于0.005%,而两个机型的硫含量计算结果略高于实际值,这是因为所用试验燃油硫含量本身较低。同时,由于传感器测量精度和数学模型的计算误差,使得不同机型计算得到的硫含量有所不同,但基本能反映燃油硫含量的范围。
图9显示了两个机型不同工况下的NOx实时排放及其计算比排放。如图所示,NOx在180秒测试时间内相对平稳,无人机监测平台计算值与排放分析仪测量值对比显示,机型A四个工况标准差均在1以内,机型B工况1标准差为0.98,其余工况标准差均在0.3以内,基本满足精度要求。
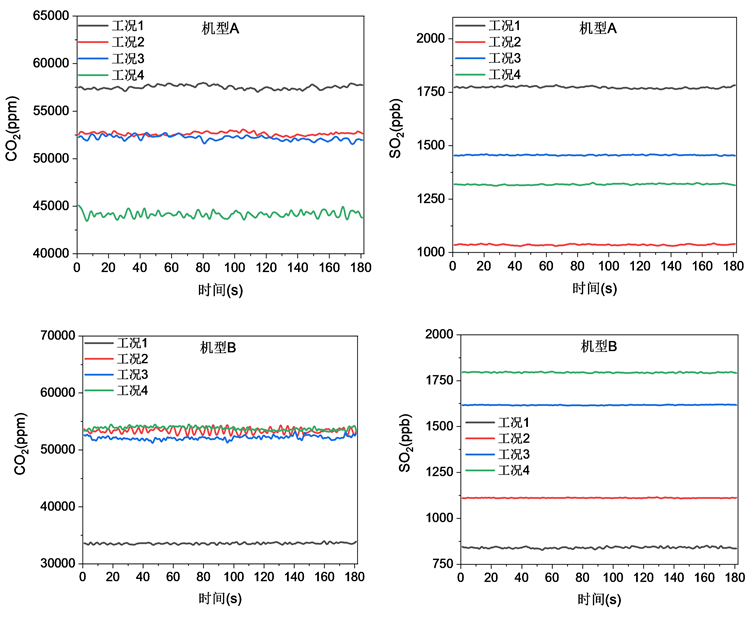
Figure 7. Real-time CO2 and SO2 emissions of different conditions
图7. 不同工况CO2与SO2实时排放

Figure 8. Comparison between calculated sulfur content and the fuel analysis report
图8. 硫含量计算值与油品报告

Figure 9. Real-time NOx emission and the brake emission
图9. NOx实时排放与比排放
5. 结束语
本文设计了基于无人机的船舶尾气监测平台,实现了对船舶尾气NOx和硫含量的实时监测。测试结果表明,该监测系统基本能够满足实时监测的需求。基于无人机的船舶尾气监测系统,在监测位置、监测范围和监测时间上更具有灵活性和针对性,同时利于提高监测效率。但是本研究选取的传感器精度不高,同时数学模型有待进一步修正,以提高计算结果精度。