1. 简介
多目标跟踪是当前计算机视觉领域的研究热点。它的主要任务是在给定视频中同时对多个特定目标进行定位,同时保持目标的ID稳定,最后记录它们的轨迹 [1]。目前主流的行人多目标跟踪遵循检测跟踪范式,它将MOT问题分成两个独立的步骤,即首先通过目标检测算法检测出视频帧中目标对象可能出现的区域,然后通过关联模型将属于同一运动目标的检测框关联到一起,得到目标的关联轨迹,完成目标对象的跟踪。本文沿用检测跟踪范式进行行人多目标的研究。
近年来,基于检测的多目标跟踪研究越来越多。Bewley等 [2] 提出Sort网络,利用双阶段检测器同时结合卡尔曼滤波 [3] (Kalman Filter)和匈牙利算法 [4] (Hungarian Algorithm),前者用来预测目标框在当前帧中的位置,后者以预测框和检测框的交并比(Intersection over Union, IOU)为相似性度量来匹配来完成数据关联。Sort在面对人流较稀疏场景简单有效,在遮挡拥挤的场景下会使目标ID的变换次数多,跟踪准确性差。Wojke等 [5] 针对SORT存在的缺陷提出了DeepSort算法,在Sort基础上加入了级联匹配和外观模型,级联匹配策略提高了目标匹配准确度,外观模型使用行人重识别(Person Re-identification, ReID)网络 [6] 提取目标的外观特征作为数据关联的辅助度量,有效的解决了身份切换的问题。但串联两个深度学习模型使得计算量急剧增加。Wang等 [7] 提出JDE网络,将ReID网络与检测网络整合到一个网络中去,在输出目标的同时也输出相应的表观特征,然后结合运动信息进行数据关联。虽然都是采用逐检测跟踪范式,但它们大多数检测器的性能有待提高并且大多数MOT方法只保留了满足阈值条件的检测框,并未对检测框进行充分利用。
本文提出了一种迭代策略的多目标跟踪方法,通过迭代检测,分别检测出高置信度和低置信度的目标框,充分考虑所有检测框。并在数据关联中对迭代结果分阶段处理,缓解检测框干扰造成的轨迹漂移而形成的身份切换问题。
2. 提出的方法
本文将多目标跟踪算法分为两个步骤,即第一步是目标迭代检测阶段,通过两次目标检测分别得到高置信度和低置信度目标框;第二步是数据关联阶段,利用轨迹和检测框之间的相似度进行匹配。迭代策略下对检测框分批次处理有效的减少了跟踪过程中身份切换问题同时提高了跟踪精度。图1是本文整体的网络结构。
2.1. 迭代检测
目标检测是多目标跟踪的基础,检测器的性能决定了数据关联的上限。但基于深度学习的检测器更倾向于对相同对象的进行重复检测,然后通过非极大值抑制算法对检测框进行过滤,最后只剩下一个边界框,但这在拥挤环境中通常效果很差,常常出现漏检的情况。针对这个问题提出了迭代策略如图2所示,通过两次迭代输出最终的检测结果。由于当前迭代中考虑所有先前迭代检测到的目标框,所以不会两次检测到同一对象。
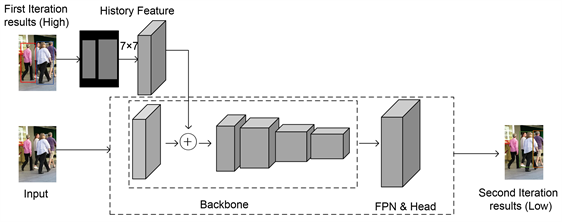
Figure 2. Network structure of iterative detection
图2. 迭代检测网络结构图
目标检测的一般流程:输入图像
得到一组边界框
,每个目标框由左上角坐标
,宽度为W,高度H表示。在本文迭代策略中引入了灰度图像作为历史图像
与输入图像大小相同。初始时所有像素值为0,当检测器检测出行人位置在灰度图上对应位置像素值加1,同一位置存在不同检测框时像素值进行累加,如公式(1)所示,
(1)
其中n为先前迭代检测的边界框的数量。
迭代策略下的检测为:在给定图像I的情况下,第一次迭代t = 1,此时历史
为空即灰度图像像素值为0,联合图像I和
并通过阈值
设置可以得出第一组高置信度检测框
,其次,
被映射到历史
,然后第二次迭代结合图像I和
得出第二组低置信度检测框
。
2.2. 数据关联
数据关联是多目标跟踪的核心,它首先计算机轨迹和检测框之间的相似度并根据相似度利用不同的策略进行匹配。位置、运动和外观都是关联的有用线索,在短距离匹配中位置和运动相似性 [8] 是准确的,外观相似性有助于长距离匹配,在获得相似性度量后,可以通过匈牙利算法或者贪婪赋值算法 [9] 来进行匹配。
以往的多目标跟踪方法中通常只保留高置信度检测框。在本文迭代检测中充分利用了每个检测框。并按照迭代结果的先后顺序处理不同检测框。我们首先将高置信度检测框与轨迹相关联。有些轨迹无法匹配到高置信度检测框,这通常发生在遮挡、运动模糊或大小变化时。然后,我们将低置信度检测框与这些不匹配的轨迹相关联,以恢复低置信度检测框中的对象,同时可以过滤到检测得到的假阳性目标框即背景。关联的伪代码如下算法所示。
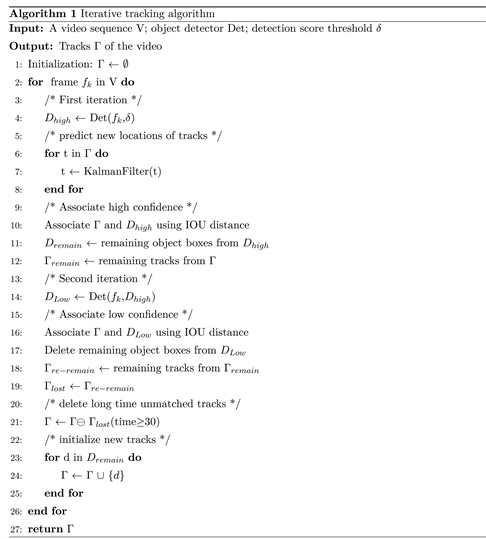
数据关联中输入的是视频序列V,检测器对象Det和检测置信度阈值
,实验中
设置为0.6。
输出是视频的轨迹Γ,每个轨迹包含每个帧中目标的边界框和标识。流程如下:
1) 对于视频的每一帧,使用检测器Det第一次迭代检测出高置信度的检测框
即得分大于
的检测框。
2) 利用卡尔曼滤波器来预测Γ (包括丢失的轨迹)中每个轨迹在当前帧中的新位置。由于轨迹的丢失常常伴随着遮挡,但同时丢失轨迹也在运动,所以为了丢失轨迹的恢复保留其身份,并进行新位置预测。
3) 高置信度检测框
和预测的轨迹框Γ之间的IoU来计算相似度,采用匈牙利算法来完成基于相似度的匹配,此为第一次关联。
4) 使用检测器Det结合前一次迭代的结果第二次迭代检测出低置信度的检测框
,将其和剩余轨道
之间执行第二次关联。我们保留不匹配的轨迹
,视为丢失的轨迹
,只删除所有不匹配的低置信度检测框,因为它们往往是迭代检测出的假阳性框即背景。
5) 对于
中的每个轨道,当它存在超过一定数量的帧(即30帧)时,从轨道Γ中删除它。
6) 对于第一次关联之后从不匹配的高分检测框
初始化新轨迹。
3. 实验结果与分析
3.1. 数据集与实验环境
本文在公开的行人检测数据集CrowdHuman的训练集 [10] 训练迭代检测器,用CrowdHuman的验证集验证检测器性能,用MOT16的训练集 [11] 作为验证集验证跟踪算法性能。实验环境基于Ubuntu 18.04操作系统,Nvidia GeForce RTX 3090显卡,运行内存24G,采用Pytorch1.8.1深度学习框架,在Python3.7的服务器下实现。选择多目标跟踪公开数据MOT16测试集测试本文算法,并MOT Challenge官网上对结果进行评估,同时与其他算法进行对比,并分析模型性能。
3.2. 评价指标
本文采用一些通用评估指标分别对行人检测和多目标跟踪进行客观评价,以证明算法的准确性。对于行人检测采用平均精度(mAP),召回率(Recall),平均丢失率(mMR)作为评估指标。部分评价指标公式如公式(2),(3),(4)和(5)所示
(2)
(3)
(4)
(5)
平均丢失率mMR,是在(False Positive Per Image) FPPI@0.01-1下漏检数的平均值越低越好。
对于多目标跟踪采用多目标跟踪领域通用的评估指标进行评估,评估指标如下:
1) MOTA (Multi-object Tracking Accuracy)代表多目标跟踪的准确度,综合考虑了误检、漏检和身份切换3种因素,衡量模型在目标检测和轨迹关联的整体性能,如公式(6)所示。
(6)
其中
表示真实边界框数量;
表示整个视频的漏检数;
表示整个视频的误检数;
表示总的行人ID切换次数;
2) MOTP (Multi-object Tracking Precision)代表多目标跟踪精度,计算目标检测框与真实框在所有帧之间的平均度量距离。如公式(7)所示。
(7)
其中t表示当前帧为第t帧,
,
表示第t帧中第i个预测框与真实框之间的重叠率,即IoU (Intersection-Over-Union)距离;c表示目标成功匹配数量。
3) IDF1 (Identification F1 Score)代表多目标跟踪器ID维持能力。
4) IDs (ID Switch)代表整个跟踪过程行人身份(ID)切换的数目。
5) MT (Mostly Tracked)代表至少在80%匹配成功的跟踪轨迹。
6) ML (Mostly Lost)代表在小于20%的时间成功匹配的跟踪轨迹即大多数丢失目标百分比。
3.3. 结果分析
本文使用Faster R-CNN [12] 作为行人检测框架,使用ResNet50 [13] 作为骨干网络,添加FPN模块,并添加BN层改善FPN模块的特征融合效果,训练使用Adam优化器,epoch设置为24,学习率设置为0.0005,在第16个epoch和第22个epoch时学习率分别乘以0.1。在训练过程中,在标注框随机选取一部分标注框并生成历史特征,同时该部分标注框将不参与训练,将历史特征添加到骨干网略中去训练网络使得网络预测到的结果更加接近剩余的标注框,从而迫使网络学习利用历史特征。引进迭代策略改进后的模型与基准模型在CrowdHuman验证集上的结果对比,如表1所示。

Table 1. Comparison results of iterative detection and benchmark model on CrowdHuman verification set
表1. 迭代检测与基准模型在CrowdHuman验证集上的对比结果
对于多目标跟踪,本文选择MOT16数据集进行实验,与几种先进多目标跟踪算法进行对比,结果如表2所示,本文在迭代策略下充分考虑到所有检测框,并且对检测框的分批次处理,因此在MOTA、MOTP等指标上都有所提升。跟踪效果如图3所示。在MOT16-03中61号和MOT16-06中71号行人在面对遮挡情况,依然可以准确追踪。
Table 2. Comparison results between the proposed algorithm and other algorithms on MOT16 data sets
表2. 本文算法与其他算法在MOT16数据集上的对比结果

Figure 3. Multi-object tracking effect. (a) MOT16-03; (b) MOT16-06
图3. 多目标跟踪效果。(a) MOT16-03;(b) MOT16-06
4. 结论
本文针对行人多目标跟踪过程中因为遮挡导致的行人ID频繁切换,跟踪效果差的问题,提出一种迭代策略的多目标跟踪算法。该算法选用TBD跟踪范式,通过迭代检测,分别检测出高置信度和低置信度的目标框,充分考虑所有检测框。并在数据关联中对迭代结果分阶段处理。其准确的检测性能和关联低置信度检测框的帮助,对遮挡非常鲁棒。在未来,我们将继续探索更加可靠的相似性度量和匹配策略,以提升多目标跟踪任务的整体性能。