1. 引言
在科技领域和自然界物理现象的许多变化过程中,运动状态可能会在某一时刻发生突变,而这个时间可以看作是瞬间发生的,即以脉冲的形式出现。脉冲系统是一类特殊的混杂系统,由三部分构成:用微分方程描述连续动力学部分,控制系统在脉冲之间的运动;用差分方程描述离散动力学部分,控制瞬时状态跳跃或者脉冲瞬间的重置;以及脉冲频率,决定这些脉冲何时发生。在过去几十年,脉冲系统越来越受到学者的关注 [1] [2]。一般来说,脉冲系统问题可以分为两类,即脉冲控制问题 [3] [4] 和脉冲干扰问题 [5] [6] [7],并在许多领域得到了广泛应用,如网络控制系统 [5]、生物模型 [6] 和多智能体控制 [7] 等。
稳定性理论的研究是非线性系统研究中经久不衰的一个课题。相较于传统的Lyapunov渐近稳定性,有限时间稳定性(FTS)在控制理论研究中具有广泛的应用价值,如高阶滑膜控制问题 [8] [9]。FTS不仅需要李雅普诺夫稳定性,而且需要有限时间的收敛性。近年来,不少学者对非线性系统FTS做了广泛的研究。例如,Bhat给出了连续非Lipschitz自治系统平衡点FTS [10],Polyakov提出两种非线性控制算法给出了闭环系统的全局有限时间稳定性 [11],Lu利用Lyapunov的反函数提供了有限时间收敛的充分条件 [12]。对于非线性脉冲系统的有限时间稳定性,文献 [13] 建立了非线性系统分别在具有镇定效应的脉冲和脉冲扰动作用下FTS的李雅普诺夫定理,并提供了估计关于脉冲时间序列的沉降时间的充分条件。文献 [14] 研究了非线性脉冲系统的有限时间稳定性和固定时间稳定性,并得到了更为一般的李雅普诺夫定理。在输入系统中,输入到状态稳定(ISS)描述了外部输入对系统稳定性的影响,除了作为分析工具之外,在非线性控制系统的设计中具有核心作用,使其在过去几年也引起了许多关注。例如,Cai研究了基本预测器反馈的逆最优性和干扰衰减性质 [15] 以及加性对象扰动ISS [16],Dashkovskiy证明非线性脉冲系统在满足广义平均驻留时间条件的序列ISS [17]。文献 [18] 中首次引入了FTISS,并提出了非线性系统FTISS的几个充分条件和必要条件。到目前为止,由于非线性系统的非光滑性有关的技术难度和复杂性,即使是在线性系统中对FTISS的研究也很少 [19] [20]。最近,文献 [21] 利用李雅普诺夫理论和驻留时间法给出了非线性脉冲系统FTISS的充分条件,具体地说,存在具有局部Lipschitz连续函数
使得
,当
,
其中
,
,
为外部输入。然而,在很多实际应用中,对上式李雅普诺夫函数的导数有以下形式:
,当
,
其中
。如果直接将后面的
用0替代,则我们在估计的收敛时间时会出现较大的误差。受上述思想的启发,本文将改进推广文献 [21] 中的结论,并给出了更一般的非线性脉冲系统FTISS的充分条件。
2. 预备知识
令
为实数集;
为非负实数集;
为正整数集;
为非负整数集;
为n维欧氏空间;
为二维欧氏范数;
和
分别为a和b的最大值和最小值;对于
,
,令
是一个可测的基本有界函数且 为最大范数,特别地
,对于
,
为最大范数,特别地
,对于
, 。
。
考虑一个非线性脉冲系统
(1)
这里
为系统状态;
是一个已知的初始状态;
是一个可测的基本有界的外部输入;
和
是满足
的连续函数;脉冲时间序列
满足
且
;假设函数f满足适当的条件使得解
在相关时间间隔内存在唯一正向解;假设
和
是左连续;对于给出的脉冲时间序列
,
表示系统(1)在半开区间
上的脉冲次数。
对于一个局部Lipschitz连续函数
,沿着系统(1)的解
的右上导数定义为
.
定义1.1:如果函数
是连续的,严格递增并且
,则称函数
是
类函数。如果函数
也是无界的,则称函数
是
类函数。
定义1.2:如果函数
满足:
i) 对每一个固定
,
关于第一个变量是
类函数;
ii) 对于每一个固定
,且当
时,
递减趋于0;
则称
是
类函数。
定义1.3 [21]:如果函数
满足:
i) 对于每一个固定
,存在
,使得当
时,
递减趋于0;
ii)
;
iii) 对于每一个固定
有
则称函数
是
类函数。
定义1.4:设
是一个包含原点的开集,如果存在
,
使得对任意
和
,系统(1)的解
满足
,对
, (2)
则系统(1)是FTISS。
与传统的ISS相比,FTISS的主要区别在于对于给定的初始状态
,
将在有限时间内进入最终界限,并且此后不超过这个界限。
假设
表示一类可容许的脉冲时间序列,
表示一类满足固定驻留时间(FDT)条件的脉冲时间序列,即
,
。
3. 主要结果
下面,利用FDT条件建立非线性脉冲系统(1)的FTISS的充分条件。
定理2.1:假设
是一个局部Lipschitz连续函数,如果存在函数
,常数
,
,
,
,
,使得:
(A1)
,
;
(A2)
,
,
;
(A3) 当
时:
,
, (3)
其中
为系统(1)初值为
的解,这里
;
(A4)
,
这里
,则系统(1)在
上是FTISS。
证明:对于任意满足条件(A4)的
,可以找到一个充分小的常数
使得
且
。 (4)
因为
,所以对任意
,有
且
。令
,当
时,
;当
时,
。因此,我们有
。 (5)
令
为任意脉冲时间序列。假设
是系统(1)以
为初值的解,这里
。为了方便,我们令
。对于任意
,定义:
,
这里
且
。定义
这里
。下面证明
, 对
。 (6)
因为
和
在脉冲点上右连续,所以存在一个时间序列
使得对于
有
,
, (7a)
,
。 (7b)
定义在区间
上的脉冲点为
,这里
。
首先引入变量变换
,则(3)式变为
,由常数变易公式和比较原理得
,
。
故
. (8)
下面我们分两种情况考虑:情况(i)
,即
;情况(ii)
,即
。若情况(i)成立,对于
,当
时,即在区间
上没有脉冲,由(A1)、(4)和(8)得
(9)
当
时,在区间
上的脉冲点为
,
。所以由(9)得
,
。
当
时,由(7a)可知,
。结合条件(A2),我们有
由(4)和(8)式得
继续将上式结果结合(4)和(8)式,对
我们有
。
当
时,我们有
及
下面我们将证明
,
。 (10)
现在假设在区间
上,k满足
并且
,
,可以得到
。
在
上,由(8)式得到
及
所以(10)式在
上成立。通过归纳法得出,当
时,(10)式对
都成立。如果
,则(10)式在
上成立。如果
,则当
上时,由(5)和(7b)式得
。
当
上时,如果
不是脉冲点,由(5)和(7a)式得
。
如果
是脉冲点,由(5)和(7b)式得
。
当
上时,若
,则
。
若
,对于
,由(A3)得
。对于
,
,类似于(10)的证明,我们有
所以,对于
,可以得到
。结合(10)式,我们有,在
上,
。
若情况(ii)成立,在这种情况下,证明方法与上面相同,我们最终可以证得
。
联立(A1)和(6)式可以得到
,即
。这里
是一个
函数,
是一个
函数。因此系统(1)在
上对于任意脉冲序列
是FTISS。得证。
注1:假设(A3)保证了不具有脉冲效应时系统(1)是FTISS。故,当系统(1)受到稳定的脉冲扰动,即
时,对于任意的脉冲频率
,系统(1)都是FTISS的;当系统(1)受到不稳定的脉冲扰动影响,即
时,定理2.1得到了系统(1)仍然保持FTISS性质的脉冲频率的下界,即
。
注2:当系统(1)不具有脉冲扰动且假设(A3)中
时,定理2.1将退化成文献 [18] 中的结论。当假设(A3)中
时,定理2.1将退化成文献 [21] 中的结论。
注3:当
时,系统(1)将退化为无外部输入的脉冲非线性系统。此时,在定理2.1的条件下,系统(1)将FTS。文献 [22] 考虑了在脉冲扰动满足
时系统FTS的结论,这种情况脉冲效应具有镇定性。而在定理2.1中,如果不考虑外部输入,(A2)变成
,
。此时,脉冲效应将破坏系统的稳定性,所以脉冲不能太频繁的发生。
4. 数值模拟
本节给出两个数值例子说明本文中定理的正确性。
例1:考虑下面一维脉冲系统:
(11)
假设初始状态
,其中
是一个给定的正常数。选取
,则
,当
。
根据定理,当
时,
,这里
和
。当
时,取
,
,
则(3)式成立。因此,对于
且
,
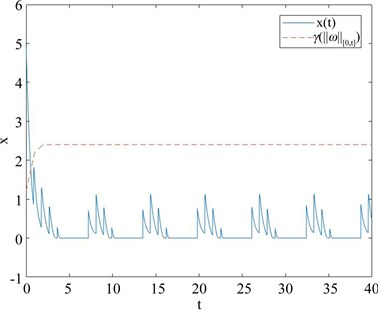
Figure 1. The trajectory of the system when
图1. 当
时的系统轨迹
则系统(11)是FTISS,这里
在定理2.1中已定义。取
,
此时,
和
,从而我们有冲频率
。在数值模拟中,取
,
时,
,此时图1显示了系统(11)在初始状态
时的轨迹在有限时刻进入
的界,此后并没有超过这个界。另一方面,在相同条件下,取
,
,这不满足FDT的约束条件,从图2上可以看出轨道不时超过界
。
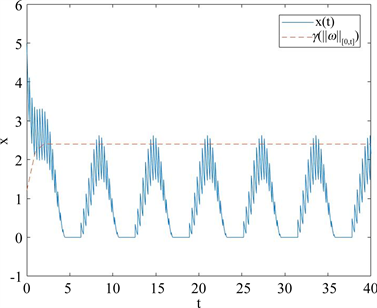
Figure 2. The trajectory of the system when
图2. 当
时的系统轨迹
注4:运用文献 [21] 的结论,我们得到只有当
时系统(11)才能达到FTISS。因此,我们的结论在估计脉冲频率上大大改进了文献 [21] 的结论。
例2:考虑一个三维脉冲系统:
, (12)
脉冲点满足
,
。 (13)
这里
,
,
,并且
,
。
假设初始状态
,
是一个给定的常数。选取
,对
,则
,当
。
这里
,
,
,则定理1的(3)式成立。对于
,我们可以得到
这里
,
。那么对于任意给定的脉冲时间序列
且
。
取
,
,
,则
。从而,我们可以得到
时系统(12) FTISS。图3显示了系统(12)和(13)在选取
,
,此时
,及初始时刻分别为
,
,
,
时的轨迹在有限时刻进入
的界,此后并没有超过这个界。另一方面,在相同条件下,取
,
,
,这不满足FDT的约束条件,从图4上可以看出轨道不时超过界
。

Figure 3. The trajectory of the system when
图3. 当
时的系统轨迹
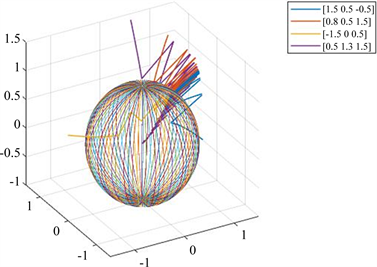
Figure 4. The trajectory of the system when
图4. 当
时的系统轨迹