1. 引言
随着高新技术与我国汽车行业的快速发展,越来越多的新能源汽车企业涌入汽车市场中。运用在新能源汽车上的高新技术也越来越多。自动驾驶(autonomous driving)相关技术运用在新能源智能汽车上的比重也越来越高。工程师在新型电动智能汽车底盘、以及动力驱动方式上也做了非常多的相关研究,从传统的单电机驱动、前后双电机驱动演化到现在先进的分布式电机驱动。分布式驱动电动汽车相比于传统的通过传动轴传动的汽车来说具有整车质量降低、车轮力矩可独立控制、传动效率高等优点 [1] 。因此分布式驱动电动汽车一直都是学术界以及工程界研究的重点对象。人们想要车辆在行驶的过程中拥有转弯半径小、行驶稳定性高等优点,介于此衍生出对四个相互独立驱动的电机如何进行合理的转矩分配、对于车身总体稳定性如何提升相关研究问题。
我国许多学者对于分布式驱动汽车稳定性提升的相关研究非常之多,并提出了许多在仿真领域被证实有效的方法。2013年张利鹏等人提出在低附着系数的路面上利用驱动电机的转速和转矩反馈实现驱动防滑,从而提升整车行驶稳定性的方法 [2] 。2020年陈哲明等人提出运用模糊PID控制算法对车身横摆力矩进行控制的方式来维持车身的操纵稳定性 [3] 。2021年王伟达等人提出利用一种新的非线性联合滑模变结构主动控制的顶层控制器,实现了车辆横摆角速度与质心侧偏角的解耦控制 [4] 。
2. 分布式驱动车辆仿真控制系统的建立
为对分布式驱动电动汽车整车稳定性进行分析研究,对整车稳定性进行优化提升。本文在仿真模拟环境下,提出基于车轮滑移率对车轮的运行状态进行评估,利用转矩补偿以及转矩输出限制的方法来对独立车轮的动力输出进行干预。保证车轮与路面有良好的纵向、侧向附着力,提升整车的车辆行驶稳定性。为完成这一工作,采用CarSim与Simulink联合仿真的方式进行系统的搭建。整体仿真系统可分为整车模型、车辆动力学模型、电机模型、轨迹规划模块、纵向控制模块、横向控制模块。滑动判定转矩补偿模块主要根据车辆的纵向运行速度来进行相关计算并对车轮的转矩做出干预。整车控制逻辑关系图如图1所示。
2.1. 整车仿真模型
对于汽车这种高集成、复杂度高的特殊集合体,想要对其做专业性的研究的话需要一款在行业中认可度且准确度高的仿真软件来确保成果的正确性。汽车仿真相关研究无论是在学术界还是在工程界,认可度比较高的专业仿真软件为CarSim与Simulink。CarSim与Simulink能够为工程师提供非常专业且准确的仿真环境。本文利用CarSim与Simulink联合仿真的方法搭建了基于分布式驱动的电动汽车整车模型。在CarSim中对整车模型进行相关参数设置,完成后发送至Simulink中进行整车模型正确性的验证,以确保设置的电动车模型是符合现实物理形态的。
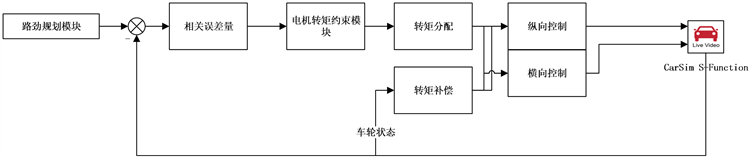
Figure 1. Vehicle control logic diagram
图1. 整车控制逻辑关系图
对整车模型进行正确性仿真测试,从以下几点证实整车模型的正确性:1) 动力切断实验;2) 速度跟踪实验;3) 差速转向实验。验证仿真数据如下:(图2)
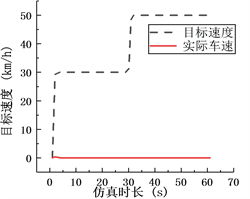 (a) 动力切断实验
(a) 动力切断实验 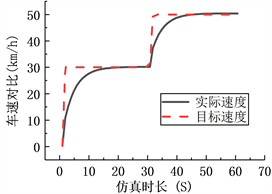 (b) 速度跟踪实验
(b) 速度跟踪实验 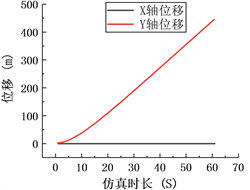 (c) 差速转向实验位移
(c) 差速转向实验位移 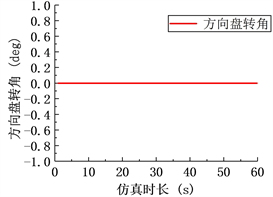 (d) 差速转向方向盘转角
(d) 差速转向方向盘转角
Figure 2. Vehicle model correctness verification experiment
图2. 整车模型正确性验证实验
2.2. 车辆动力学模型
建立分布式驱动电动汽车的二自由度动力学模型,只考虑车辆的纵向以及横向运动。忽略其他次要参数。整车动力学模型示意图如图3所示。
在高速情况下假设前轮转角很小,即车辆在高速行驶过程中不会突然发生大角度转弯的情况 [5] 。此时
。根据图3给出的自行车模型示意图结合牛顿力学之间的相关关系,可以得到车身在横向运动方程:
(1)
假设
很小,则可得:
(2)
式中
为横摆角速度,rad/s;
分别为前后轴到车辆轴心距离m;
前轮转角,
为车身绕Z轴转动的转动惯量kg∙m2,
为整车质量,kg;
,
分别为后轮、前轮侧向力。
车辆纵向运动过程中不考虑空气动力学以及忽略车身悬架对车辆行驶的影响。只考虑车身的加速、减速运动。纵向运动方式为:
(3)
式中
为整车质量,kg;
为纵向加速度,
,
分别为前轮、后轮纵向力。
在纵向控制中只需要对四轮可输出转矩进行控制即可实现纵向运动上的速度控制。
2.3. 电机模型与轨迹规划模块
在本文中采用Simulink作为理想条件下的仿真环境,不对车辆电机进行实际物理建模,在Simulink中对电机可输出的最大转矩进行约束。轨迹规划模块可使用CarSim进行轨迹规划,利用联合仿真的特性进行实时轨迹路线的输出。
3. 总体控制策略设计
总仿真系统可分为两大控制部分,横向控制部分与纵向控制部分。本文着重对车辆横向稳定性提高进行研究。在纵向控制方面采用传统PID控制策略,及期望速度与车身实际速度进行计算,得出需求转矩,通过电机转矩限制模块与转矩分配模块后输出到整车模型中。
滑动补偿控制方法
在汽车行驶过程中,要给予轮胎充分的抓地力,否则会发生打滑或在转弯过程中发生漂移等行为,对车身稳定安全性有影响。对于车轮是否发生滑动有一定的判定标准,可通过车轮滑移率来对车轮的运行状态进行界定。滑移率计算公式如下:
(4)
式中
为车速;
为车轮速度;
为车轮半径,
为车轮角速度。
无论汽车是在行驶还是制动过程中,控制车轮始终处于最佳滑移率区间内,能够为车辆提供充足的动力与制动能力。进而减少车辆发生打滑的场景,提升车辆整体稳定性。因此本文通过根据每个车轮的运动状态来进行动力扭矩输出的控制。从而使得整车车轮都行驶在最佳滑移率区间内。总体控制策略如图4所示:

Figure 4. Sliding compensation decision control logic diagram
图4. 滑动补偿判定控制逻辑图
对滑移率的控制方式采用传统PID控制器进行控制,在获得每个车轮滑移率的情况下,假设车轮处于滑动状态,即当前滑移率高于理想滑移率区间值,则要降低车轮滑移率。通过滑移率计算公式可以计算出当前滑移率
与当前车轮速度
,设定理想滑移率
,通过式(4)计算出对应的车轮速度
。利用PID控制器调节当前车轮驱动器所输出的驱动转矩来对当前车轮速度进行控制(图5)。
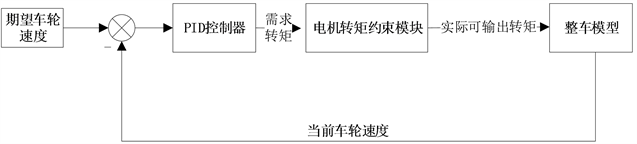
Figure 5. Expected wheel speed control logic diagram
图5. 期望车轮速度控制逻辑图
当前车轮假设运行状态处于最佳滑移率区间内,则不对车轮进行转矩干预,将车轮的转矩输出控制权交给车辆纵向控制模块。滑动转矩补偿模块不作过多干预。
4. 仿真测试及总结
在CarSim与Simulink联合仿真平台中进行仿真模拟测试。主要测试点为本文提出的基于滑移率的车轮滑动转矩补偿方法对于车身横摆角速度的优化有效。在CarSim与Simulink中同时设置仿真时长为20 S,在转矩分配模块采用经典的平均分配模式,整车参数如表1所示。
为保证仿真结果的正确性,采用汽车工业界权威性最高的CarSim与Simulink作为仿真测试工具,并在2.1. 整车仿真模型小节中对整车模型的正确性进行了验证,实验数据表明该整车模型具有分布式驱动车辆的动力特性。

Table 1. Vehicle model parameters
表1. 整车模型相关参数
仿真时,在CarSim中设置左右道路附着系数为0.5,道路总长度为100 m,仿真总时长为20 S,车辆在整体的运行过程中呈直线运动。初始速度为0 km/h,车辆方向盘转角输入为0度,减速运动中不对刹车压力做干预,采用电机制动方式进行车辆减速。由于是分布式驱动电动汽车模型的仿真,在变速箱与传动轴方面都已被取消,完全遵循四轮独立驱动的方式进行动力输出。分别对加入滑动补偿算法与不加入滑动补偿算法两种情况进行仿真对比。结果发现,在车辆直线运动时,无滑动补偿算法的车辆会有一定程度的横向偏移。加入滑动补偿算法后可以对其进行消除优化。结果表明在低道路附着系数的道路上行驶时,加入滑动判定转矩补偿算法后,能够对车身发生的一些细微的横摆运动进行抵消与优化,进一步的提升车辆在行驶过程中的舒适性与稳定性。同时在车辆的纵向运动中也能达到很好的速度跟踪效果。对车轮进行转矩输出干预不会影响总体纵向车速的性能(图6)。
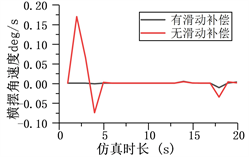
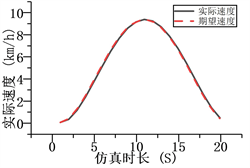 (a) 车辆速度曲线 (b) 横摆角速度曲线
(a) 车辆速度曲线 (b) 横摆角速度曲线
Figure 6. Simulation result data graph
图6. 仿真结果数据图
5. 结论
本文通过对分布式驱动电动汽车进行动力学建模,利用分布式驱动汽车的动力独立输出的特性,根据车轮滑移率与车速之间的关联性关系,提出一种基于车轮滑移率来判定车轮运动状态,通过控制车轮转矩输出使得车轮处于最佳滑移率区间的方式来降低车轮打滑的情况。在CarSim与Simulink的联合仿真中进行仿真测试,实验表明在低道路附着系数的道路上行驶时,加入滑动判定转矩补偿算法后,能够对车身发生的一些细微的横摆运动进行抵消与优化,进一步的提升车辆在行驶过程中的舒适性与稳定性。
基金项目
西南民族大学中央高校基本科研业务费专项资金资助(项目编号:2021NYYXS66)。