摘要: 当前爬楼机器人存在的主要问题影响着相关产品的性能,制约了产品的推广。首先针对爬楼能力弱、操作空间受限的技术性能问题,设计了一款可替换的模块化爬楼机器人;其次结合楼梯结构特性,基于丝杠和电动推杆构建三个抬升支架,设计了合理的抬升式爬楼模块;最后运用UG软件建立了爬楼机器人三维模型,并对其关键模块进行了有限元分析和运动仿真。该型机器人底部采用可替换模块,提高了更多应用场景的适应性,可以有效提高人们生活质量和工作效率。
Abstract:
At present, the main problems of climbing robots affect the performance of related products and restrict the promotion of products. Firstly, aiming at the technical performance problems of weak climbing ability and limited operating space, a replaceable modular climbing robot is designed; Secondly, combined with the structural characteristics of the stairs, three lifting brackets are con-structed based on the lead screw and electric push rod, and a reasonable lifting climbing module is designed; Finally, the three-dimensional model of the climbing robot is established by UG software, and the finite element analysis and motion simulation of its key modules are carried out. The re-placeable module is adopted at the bottom of the robot, which improves the adaptability of more application scenarios and can effectively improve people’s quality of life and work efficiency.
1. 引言
近年来,人工智能领域技术创新与科研成果转化进展迅速,智能服务型机器人越来越多地出现在人们的生活中,大大提高了人们的生活质量 [1] 。近三年疫情背景下的无接触服务需求也使得服务机器人需求量大大增加 [2] [3] 。但是市场上大多数清洁服务型机器人也存在着一定的局限性:一是爬楼能力弱,多为轮式或履带式爬升,操作空间受限;二是普遍功能固定、场景单一、采购成本高 [4] [5] [6] 。因此,目前爬楼机器人存在着种类较少与市场需求大之间的矛盾,为提高老旧城区快递的搬运效率,减轻物业楼梯清洁工作量,亟需研究一种成本低廉、功能合理、使用便捷的电动载物爬楼机。同时,2021年以来全球服务型机器人国内外市场渗透率提升趋势明显,凸显中国爬升机器人核心矛盾仍在于供给侧。针对我国社会老龄化特征及消费者清洁意识大幅提高的社会需求,我们响应智能模块化爬楼机器人的“创新”发展理念,从供给侧入手,借助磁吸替换结构,根据市场需求研发设计了一款可替换模块的多功能爬楼机器人,赋予爬升机器人消毒清洁模块及轮椅爬升模块,融合轮椅、爬楼、清洁、消杀等四个结构模块,实现不同箱体的快速切换,提升爬楼稳定性,高效、快速完成工作劳动强度大的楼梯清洁作业,助力社会可持续性绿色发展,具有广阔的应用前景。
2. 爬楼机器人整体结构
爬楼是生活中的重要场景,与人们日常生活息息相关。日常生活中,由于楼梯的结构特定不同,给人们带来了众多不便。爬楼机器人就是适用于楼梯和平地等场景的装置,考虑爬楼机器人形状和效率及占地面积,同时满足市场需求,结合机器人运动仿真原理,我们采用交互式Unigraphics NX (UG)建立了爬楼机器人三维模型,如图1所示。
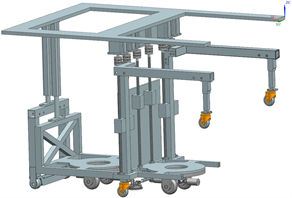
Figure 1. Structure model of climbing robot
图1. 爬楼机器人结构模型
3. 爬楼机器人结构分析
3.1. 框架结构
为提高爬楼机器人运动稳定性,我们设计了升降式底部结构。框架结构由支撑部分、抬升支架及固定支架等三部分组成。一是支撑部分,支撑后面两个箱体进行抬升,且前部由电动推杆组成,可以更好适应不同高度的楼梯,支撑部分配备的轮组均为万向节轮组,在平移时可起到辅助作用;同时,支撑部分总体抬升由四根丝杠带动,以保证其爬升效率和承重能力。二是抬升支架,通过两个丝杆及电动推杆带动框架结构的抬升,保证抬升稳定性。三是固定支架,根据受力重心分析,若抬升支架太重,必然会导致爬楼机器人后倾,基于此,我们设计了固定支架,当机器人抬升至第二台阶时,固定支架仍在第一台阶,确保了爬楼机器人的平衡性和稳定性。框架结构如图2所示。

Figure 2. Frame specific structure. 1—support part; 2—lifting bracket; 3—fixing bracket
图2. 框架具体结构。1——支撑部分;2——抬升支架;3——固定支架
3.2. 驱动结构
爬楼机器人驱动结构主要由底部云台轮组和第三支架搭配电机的轮子组成,如图3所示。底部转向由云台轴承配备万向节轮组作为主要驱动装置,云台轴承配合万向节使得机器人能在台阶进行平移工作,利用两个轮子相反差速,控制方向的转变。当在台阶上平移运动时,第三支架将微微升起,使普通轮不受到磨损。
从图3中可以看出,旋转台有两个普通实心橡胶轮,当机器人需要平移,一个轮子向前驱动,一个轮子向后驱动,万向节控制扭转角度,利用相反差速实现平移。云台轴承支撑连接各部分零件,减少其摩擦性使得平移的顺畅性。
3.3. 控制系统
由图1可知,驱动框架配备了四个万向轮、两个普通轮、四个普通实心橡胶轮及两个旋转台,控制系统通过四根丝杆和一个电推杆实现升降结构。驱动框架的前中后方各有两个万向轮,前方万向轮比中间万向轮高一个台阶,组成了一个抬升架,两个普通轮在后方做支撑架,并配有电机和推杆。当爬楼机器人到达阶梯底端,根据传感器识别的台阶高度将机器人抬升,底部轮组云台由电机驱动前进,使第一抬升支架位于第一台阶;底部轮组旋转前进,完成机器人的平移动作;第一支撑架抬升时,第二支撑架同时抬升,底部轮组前进完成台阶的爬升动作。爬楼机器人的爬楼动作如图4所示。
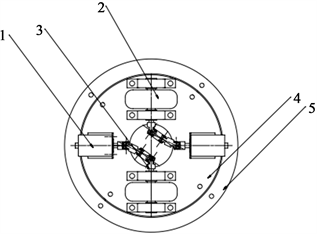
Figure 3. The structure of head wheel group. 1—motor; 2—wheels; 3—universal joint; 4—Bearing; 5—Hou- sing
图3. 云台轮组结构。1——电机;2——轮子;3——万向节;4——轴承;5——轴承座
 (a)
(a)  (b)
(b)  (c)
(c)
Figure 4. Sequence diagram of climbing robot. (a) Support section support diagram; (b) Elevation of supporting part; (c) Elevation part elevation diagram
图4. 爬楼机器人顺序图。(a) 支撑部分支撑图;(b) 支撑部分抬升图;(c) 抬升部分抬升图
4. 力学分析
4.1. 抬升支架应力分析
根据楼梯结构特点,假设楼梯长为a,高为b,爬楼机器人箱体的第一抬升支架和第二抬升支架尺寸应小于等于a,以适应楼梯台阶尺寸,确保机器人可以在台阶上稳定平移动作,抬升支架尺寸如图5所示。机器人的水平上升高度应大于等于台阶的高度b,确保三个支架都能稳定抬升至第二台阶,以避免台阶制作误差无法抬升至指定位置。在前后交替支撑完成机器人的爬升过程中,机器人重心始终处于机器人中心区域的第二支撑,防止机器人侧翻。
考虑机器人第二支撑架是承受载荷最大的模块,直接影响着机器人的整体运行和安全性,故对其做有限元分析,以保证其强度以及寿命适合机器人的运行。为验证爬楼机器人结构强度是否满足设计要求,我们对机器人的钢结构框架进行了强度校核分析,应力分布如图6所示。
计算结果表明,当钢结构框架最大变形为1.267 mm时,允许的挠度[γ] = L/300 = 1220/300 = 4.067 mm,最大变形U < [γ],因此可以满足刚度要求。由于Q235碳素钢的许用应力[σ] = 235 MPa,最大应力σma = 13.16 MPa < [σ] = 235 MPa,同时满足了强度设计要求。
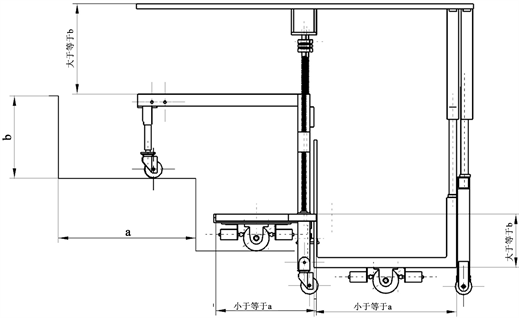
Figure 5. Dimension drawing of lifting bracket
图5. 抬升支架尺寸图

Figure 6. Stress distribution diagram of the second support frame
图6. 第二支撑架应力分布图
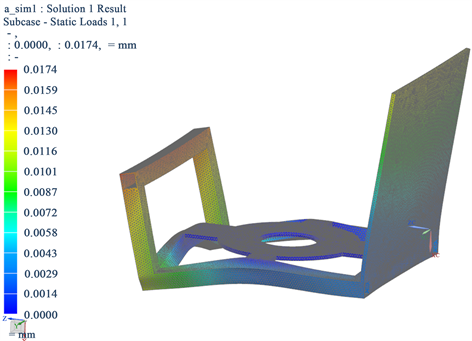
Figure 7. Finite element analysis of the second bracket
图7. 第二支架有限元分析
4.2. 第二支架有限元分析
在抬升支架应力分析基础上,我们基于ANSYS软件对爬楼机器人的钢结构框架模型进行了有限元分析,如图7所示。结果表明,最大变形发生在支撑板中间位置,而且最上面的一层变形最大,随着层数的减少变形也跟随减小,在支撑板的中间增加支撑面圆盘,进一步减少形变。整个框架可满足强度要求,满载状态下框架的刚度和强度均小于许用值。因此,第二支撑架的选材也满足了强度与刚度的设计要求。
5. 结论
随着科技的发展,为适应人口老龄化的快速增长带来的生活问题,如何更好地对已有的产品进行结构优化或轻量化设计,将是工程技术人员重点研究的方向之一。本文针对当前爬楼机器人稳定性问题,在选材和结构考虑轻量化设计的基础上,设计了一种新型升降爬升式结构,解决了爬升稳定性、操作空间受限等问题,这种优化的结构设计弥补了现有爬楼机器人的不足,更加具备明显的技术优势,有着良好的市场应用前景。
基金项目
本文得到了广东省教育厅重点领域专项(2020ZDZX2032)、广东省大学生创业实践项目 (S202113684014S, S202113684015S)资助。
NOTES
*通讯作者。