1. 引言
随着我国海洋经济的蓬勃发展和海洋强国的建设,船舶作为大洋资源勘探、海上运输 [1] 和海防建设 [2] 等领域的重要载体,其操作的有效性和安全性的要求正在不断提高。由于拥有易受外部干扰、模型参数不确定性和内部状态较难测量等特点,船舶作为一类复杂的非线性系统,其控制是非常具有挑战性的 [3] 。因此,对船舶运动的控制算法研究十分必要,其中,轨迹跟踪需要控制航向与速度在某一时间点到达期望轨迹,控制要求较高,作为船舶的基本控制问题吸引了众多学者的关注 [4] 。目前已有多种控制方法,如PID控制 [5] 、自适应控制 [6] 、神经网络控制 [7] 、滑模控制 [8] 等。其中,滑模控制由于其响应速度快、对系统扰动和不确定性的鲁棒性强等特点,已成为船舶系统的有效控制策略。不同于传统线性滑动超平面的设计,终端滑模控制方法引入了非线性函数,能够保证滑模控制稳定性,同时完成有限时间内系统状态对期望状态的完全跟踪 [9] 。
然而,在实际工程作业中使用滑模控制方案时,为了减少系统误差和外界不确定扰动的影响,通常会选择一个较大的切换增益,但是在提升控制精度的同时,状态误差以及空间滞后等实际问题造成了滑模控制器输出的抖振现象 [10] 。故在现有的研究中,学者们通过在滑模控制方法中引入智能化控制方法来优化控制输出的抖振问题。文献 [11] 中提出了一种自适应二阶非奇终端滑模控制,符号函数包含在实控制律的一阶导数中,因此,在积分后获得连续输入信号,从而抑制了传统滑模控制的颤振效应。文献 [12] 为了降低电机系统的抖振幅值同时提高鲁棒性能,定义了新的滑模表面变化率和扰动补偿措施。其次,为了改进神经网络,使用自适应理论来更新权重,并设计峰谷测量来限制输出范围。文献 [13] 首次引入了扰动观测器和RBF神经网络的组合问题,以处理电液伺服系统中的干扰和不确定性,基于多层径向基函数神经网络的具有在线自适应机制的逼近器可以有效地逼近系统动力学中的所有动态函数。综上文献所述,智能化控制方法的引入为基于滑模控制的一类研究提供了较好的削弱抖振影响的效果。
出于对时效性的考虑,较短的收敛时间对于船舶的控制问题具有实际工程意义。有限时间控制方法能够使船体系统在有限时间内稳定在平衡点,使系统拥有更好的鲁棒性能和收敛性能。为此,有必要在跟踪控制中引入有限时间方案,以保证船舶闭环跟踪控制系统的有限时间覆盖。文献 [14] 首次提出了有限时间稳定的概念并开启了有关有限时间控制问题的研究。文献 [15] 利用连续时间动力学上的标量微分李雅普诺夫不等式和离散时间重置动力学上的一个标量差分李雅普诺夫不等式,发展了脉冲动力系统有限时间稳定性的充分李雅普诺夫条件。利用所提出的有限时间稳定性结果,设计了脉冲动力系统的通用混合有限时间稳定控制律。在异步控制框架下,文献 [16] 研究了线性时变切换系统的有限时间镇定和有限时间有界镇定,基于微分矩阵不等式,提出了线性时变开关系统有限时间稳定性的充要条件。针对一类多智能体系统的有限时间指数一致性问题,文献 [17] 研究了一些干扰因素,包括系统不确定性、通信干扰和执行器故障,最终通过与四架F-18纵向解耦模型飞机的耦合系统验证了所开发的自适应一致控制策略的有效性。以上列举的相关文献展示了有限时间稳定方法在现阶段控制算法领域的重要性和优越性。
根据上述的讨论分析,针对三自由度船舶误差系统的有限时间轨迹跟踪控制问题,本文分别讨论对比了三种滑模控制方案的性能。首先,基于传统线性滑模设计控制器对船舶系统进行控制。接着,引入带有非线性项的终端滑模,使系统在参数变化时拥有更强的鲁棒性和更快的收敛速度,然而这会带来奇异性问题。因此,引入非奇异终端滑模控制方案,解决奇异点问题并降低控制输入的抖振。最终,依据李雅普诺夫稳定理论,证明了在有限时间内,各个鲁棒有限时间控制器能够保证船舶实际位置和速度的跟踪误差稳定在原点附近。
2. 问题描述及预备知识
由于本文在研究船舶水平面的运动时仅考虑水平面三个自由度方向的受力:横荡、纵荡以及艏摇。故,在船体坐标系下,三自由度船舶的动力学模型可表示为:
(1)
式中,
为船舶在大地坐标系下的位置向量,
为速度向量,
为控制输入向量,
为船体受到的外部扰动。转换矩阵
、质量惯性矩阵M、科里奥利向心力矩阵
以及水动力阻尼系数矩阵
分别表示为:
,
,
,
,
转换矩阵满足
、
以及
的特性,其中
。m为船体的质量,
为船舶所受转动的影响,
,
和
表示水动力阻尼系数,
详细的参数表示为:
,
,
,
,
,
,
,
。
除了外部风浪等环境的干扰,本文还需考虑控制系统的建模不确定性,将
和
拆为
和
。令
,
,结合式(1)以及
,对
进行求导得:
(2)
式中
代表系统非线性部分,
,
代表系统的集总扰动。故得到船舶简化后的动力学模型为:
(3)
引入船舶的期望位置向量和期望速度向量,分别为
和
。令
,
,可以得出船舶期望轨迹的动力学方程:
(4)
其中,
,在后文中简写为
。
由船舶动力学方程(3)以及期望轨迹方程(4)可定义
为位置跟踪误差,
为速度跟踪误差,可以得到船舶系统跟踪误差的动态方程为:
(5)
本文引入以下假设和引理:
假设1:存在一个正常数ld,满足
,即扰动d存在上界。
引理1 [18] :考虑如下系统:
若函数
和实数
,
满足:
那么,在原点处系统的平衡状态是有限时间稳定的,并且有限时间T满足:
3. 主要研究成果
3.1. 基于传统线性滑模的控制研究
本小节基于一类传统线性滑模控制(Linear Sliding Mode Control, LSMC)方法对船舶系统进行了有限时间稳定性研究,所设计的控制律可以保证船舶的轨迹误差能够在有限时间内收敛至0。首先,针对系统的跟踪误差方程(5)给出线性滑模控制的滑模面表达式:
(6)
式(6)中,s有三个分量,C0代表滑模矩阵必须满足Hurwitz条件,即C0 > 0。基于此线性滑模设计控制器来实现对船舶的有限时间控制,定理1被提出。
定理1. 考虑船舶轨迹跟踪误差模型(5)以及线性滑模面(6),给出滑模控制律如下:
(7)
式中,控制增益满足k > ld。此控制器可以保证在有限时间内将系统轨迹驱动到滑模面上并在之后的时间都能保持滑动,船舶的轨迹跟踪误差收敛至0。
证明:首先,对等式(6)两边同时对时间求一阶导数并代入式(7)的控制律可得:
接下来,选取李雅普诺夫函数
对其求导并代入上式得:
(8)
式(8)中,令
,由假设1可知
且k >ld,故可知
。根据李雅普诺夫稳定性分析可知s = 0可以在有限时间内达成,即滑模面的可达性得到了验证。由引理1可知,本节所考虑的船舶跟踪误差动力学系统在控制器(7)下,在有限时间内使轨迹误差收敛至0,且收敛时间满足不等式
。证毕。
线性滑模控制虽然可以依赖于滑模矩阵的设计使得系统轨迹达到收敛状态,但是此控制方法不仅不适用于更高精度的控制,收敛速度也较慢。故下一小节考虑一种基于终端滑模控制的控制方法。
3.2. 基于终端滑模的控制研究
本小节提出一类终端滑模控制(Terminal Sliding Mode Control, TSMC)方法对船舶系统进行了有限时间稳定性研究。此控制方案可以使系统轨迹跟踪误差在有限时间内趋近于0,并且和3.1节所研究的传统线性滑模相比,不仅收敛时间更快,而且系统的动态性能也更优越。首先,针对系统的跟踪误差方程(5)给出终端滑模控制的滑模面表达式:
(9)
式(9)中,
是一个正常数,p和q都是大于零的奇数,并且满足p > q。基于此终端滑模面设计控制器来实现对船舶的有限时间控制,定理2被提出。
定理2. 考虑船舶轨迹跟踪误差模型(5)以及终端滑模(9),给出滑模控制律如下
(10)
式(10)中,
,其余的参数之前的段落表示。此终端滑模控制器可以使船舶轨迹跟踪误差系统在有限时间内收敛到平衡状态。
证明:首先,对TSM式(9)两边同时对时间求一阶导数:
进一步将式(10)的控制律代入上式可得
(11)
第二步,进行李雅普诺夫稳定性分析,设
,对其求导并代入式(11)得:
(12)
由假设1可知
且
,因此,式(12)完成了李雅普诺夫稳定性证明,确保在有限时间内得到s = 0,船舶跟踪误差在有限时间内趋近于0。
第三步,对有限到达时间进行分析,本节将滑模从
到达
所经历的时间设为t1,即
,且
,
,即
也就是说船舶系统轨迹到达滑模面的阶段在t1时刻完成。此时设轨迹从
到
的时间为t2,在这个阶段已经满足s = 0,即
(13)
对式(13)的中间项进行积分可得:
从而可以得到:
(14)
经过上述的分析证明可知,在终端滑模面(9)所设计的控制器下,船舶轨迹跟踪误差
和
能够在有限时间内快速收敛至0。证毕。
TSM控制器(10)中的第三项包含
,其中
。因此,当
,且
时,会发生奇异问题,奇异点的存在会使得控制输入在某时刻趋于无穷大造成控制系统的不稳定性。由式(13)可知,当系统轨迹已经到达了滑模面之后,此项
就等同于
。从理论上讲,此时并不会发生奇异问题,但是实际工程中会存在不确定因素以及计算误差,无法保证系统状态始终保持在滑动模式中,特别是在平衡点附近(
且
)。而
且
的情况会时不时发生,故奇异问题在各个阶段都有可能发生,这强调了解决传统TSM系统中奇异性问题的重要性。
综上所述,传统终端滑模控制方案虽然可以使船舶轨迹误差在有限时间内较快地收敛至0,但是此控制方法存在两个问题,一个是前文提到的非奇异问题,一个是TSM控制方法的控制器抖振较大。故针对这两个问题下一小节考虑一种基于非奇异终端滑模的控制方法。
3.3. 基于非奇异终端滑模的控制研究
本小节提出一类非奇异终端滑模控制(Non-singular Terminal Sliding Mode Control, NTSMC)方法对船舶系统进行了有限时间稳定性分析。此控制方案不仅能够使船舶轨迹跟踪误差在有限时间内趋近于0,还针对3.2节留下的奇异性问题进行了解决并且降低了控制器的抖振。首先,针对系统的跟踪误差方程(5)给出终端滑模控制的滑模面表达式:
(15)
式(15)中,
是一个大于0的常数,p和q是满足
的两个正奇数,且
。基于此非奇异终端滑模面设计相应的控制器来实现对船舶的有限时间控制,定理3被提出。
定理3. 考虑船舶轨迹跟踪误差模型(5)以及非奇异终端滑模(15),给出滑模控制律如下:
(16)
式(16)中所涉及的参数都已在本节之前的段落中表示过。此非奇异终端滑模控制器可以使船舶轨迹跟踪误差系统在有限时间内收敛到平衡状态,并且与传统的终端滑模控制方法(10)相比有效地降低了抖振。
证明:第一步,对NTSM式(15)两边同时对时间求一阶导数:
代入式(16)的控制律可得
第二步,选取
对其求导并代入上式,进行李雅普诺夫稳定性分析,得:
其中,令
,结合假设1以及相关参数的取值范围易知
。
故由引理1以及李雅普诺夫稳定性分析可知此控制方法可以在有限时间内驱动系统轨迹到达滑模面,即滑模面的可达性得到了验证。本节所考虑的船舶跟踪误差动力学系统在控制器(16)下,在有限时间内使轨迹误差收敛至0。
第三步,对有限到达时间进行分析,将控制器(16)代入到系统(5)中,得
其中,当
时,
。
当
时,
,此时
快速减小;反之,当
时,
,也即
快速上升。由此可得,在有限时间内,可以从相平面的任何位置到达滑动模式
。一旦到达滑模面,可以发现NTSM式(15)就等同于TSM式(9),故在滑动模式下到达平衡点x1 = 0所需的时间和式(14)相同,即滑动模式下的系统跟踪误差将在有限时间内达到0。证毕。
注意到
,故在使用NTSM式(15)时,滑模变量s沿着系统动力学的导数不会存在负分数幂。因此,非奇异终端滑模控制器(16)在状态空间中总是非奇异的,有效地解决了3.2节传统终端滑模控制所存在的奇异性问题。
4. 数值仿真
首先,针对船舶跟踪误差系统模型(5),给出其中相关参数的具体取值:m = 23.800,IZ= 1.760,xg= 0.046。相关矩阵的数值表示为:
,
,
接下来,给定系统的初始值
以及
,船舶动力学模型式(1)中将d0取为
,系统建模不确定性设置为
以及
。
本文主要针对三类滑模进行控制性能的分析,接下来给出它们各自的相关参数。首先,在LSMC的滑模(6)及控制器(7)中,滑模矩阵
,
;在TSMC的滑模(9)和控制器中(10)以及在NTSMC的滑模(15)和控制器中(16),设置参数
、
和
。给出一条封闭型的期望轨迹为:
仿真结果如图1到图6所示。在全部仿真结果图中,曲线一致使用绿色代表线性滑模控制、蓝色代表传统终端滑模控制以及红色表示非奇异终端滑模控制。
首先,图1可以看出三类滑模控制器都可以使船体从期望轨迹外精准的跟踪上所设计的期望圆;图2中的两幅图所示的分别是位置的跟踪轨迹和速度的跟踪轨迹。可以看出三类滑模控制方案都使船体在有限时间内完成了跟踪任务,都使控制系统表现了良好稳定的控制性能。和理论分析的效果一致,跟踪及收敛速度上三者有明显的区别,传统终端滑模与其余两者相比的优势就是能够在有限时间内较快收敛。
图3中两幅图所示的分别是船舶轨迹跟踪误差系统的位置以及速度的跟踪误差图,分别在位置和速度六个分量上对三类滑模作了对比首先,能够保证三种控制方案都能使系统轨迹误差按照预期收敛至0。其次,收敛时间也符合预期,能明显的看出终端滑模控制方案的有限收敛时间短于线性滑模控制方案。
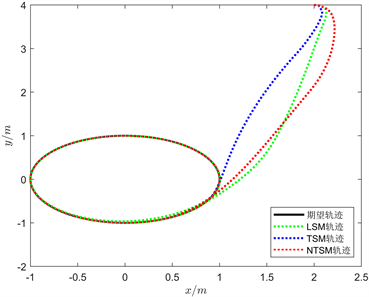
Figure 1. The actual trajectory of vehicle system
图1. 船舶的实际轨迹图
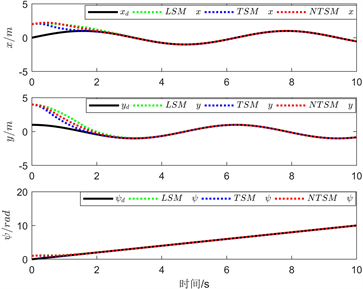
Figure 2. Tracking trajectories for position and velocity comparison
图2. 位置以及速度的跟踪轨迹对比图
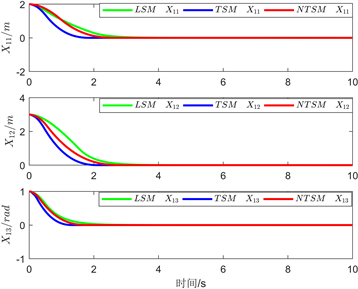
Figure 3. Tracking trajectories for position and velocity comparison
图3. 位置以及速度的跟踪轨迹对比图
图4所示的是滑模面的收敛情况,在有限时间内三类控制方法都先后达到了s = 0,证明了滑模面的可达性。图5到图6所示的是控制输入的对比情况,突出了3.2节和3.3节两种方案的对比。由于传统终端滑模的存在的奇异性问题会使得控制输入在某时刻趋于无穷大造成控制系统的不稳定性,而NTSM控制方法在极大地降低了控制输入的抖振。综上所述,仿真图1到图6实现了船舶系统有限时间的滑模控制,同时证明了本文三个定理的正确性。
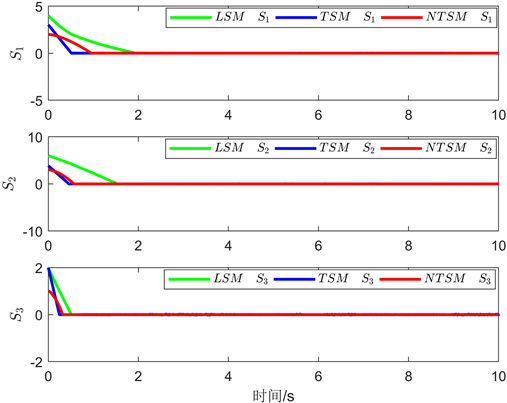
Figure 4. Three types of sliding modes
图4. 三类滑模面对比图
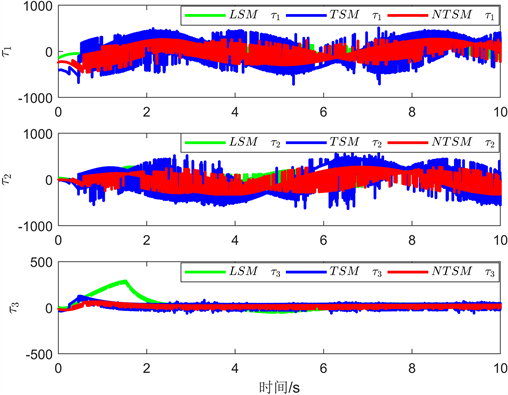
Figure 5. Comparison diagram of control inputs
图5. 控制输入对比图
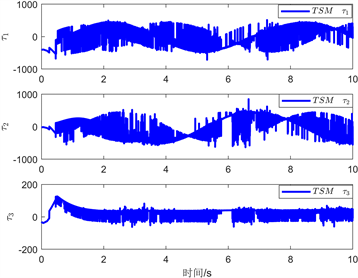
Figure 6. Control inputs of TSM and NTSM
图6. TSM和NTSM的控制输入
5. 结论
本文主要讨论了基于不同滑模控制的船舶系统有限时间轨迹跟踪问题。针对三自由度船舶系统,分别对比了三种滑模控制方法的控制性能,在能保证系统有限时间的情况下,使用传统终端滑模控制器加快有限达到的时间。接着,针对终端滑模所带来的奇异性问题进一步提出了非奇异终端滑模控制方案,有效地解决奇异点问题并且降低了系统控制输入的抖振。最后,通过进行仿真研究,可以看出所设计的控制器都可以使船舶系统轨迹在有限时间内实现精准跟踪,验证了所提出相应定理的有效性。