1. 引言
众所周知,(2 + 1)维Zakharov-Kuznetsov方程(ZK方程)
(1)
是KdV方程在二维空间的推广形式,它是应用渐进多尺度技术在磁场中发现的一种磁等离子波,在物理学领域有着广泛的应用 [1] ,许多学者对其进行了广泛的研究 [2] - [16] 。一般的,具有幂律
非线性(3 + 1)维Zakharov-Kuznetsov方程 [6] [7] [16] 为
, (2)
其中
是非零常数,
是Laplace算子,
。受文 [6] [7] [10] [11] [12] [16] 的启发,本文重点考虑幂律3 ZK方程的行波解,整体安排如下。首先,给出相应常微分系统的平衡点情况,如个数和类型;其次,针对行波解的分类及形式进行了讨论,同时给出其近似解的计算方法,基于此,在形式上给出了ZK方程对称的一种表达式;最后,对幂律
为正整数时的ZK方程作初步定性分析。
2. 准备工作
对于幂律为3的ZK方程
, (3)
作行波变换
,
,
为波速,积分一次后化为二阶常微分方程(ODE)
, (4)
其中
是积分常数,上标’(撇)指对
求导,下同。为简便,设
和
,上述ODE化为常微分系统
。 (5)
显然首次积分为
,所定义的轨线为
。注意,如果设首次积分形式为
,
为关于
的多项式,由交换代数理论的除法定理 [17] [18] 知,存在复数域上多项式
,使得
,再取
,比较系数有
,
,
,
。计算得
为非零常数,
,而
,又回到上述形式。
当
时,系统(5)的平衡点为
和
。当
时,
为鞍点,由对称原理 [19] 知
为中心;当
时,
为中心,而
为鞍点。而轨线经过点
和点
时临界值分别为
和
,
与
同号。图1给出了
时四种轨线图。
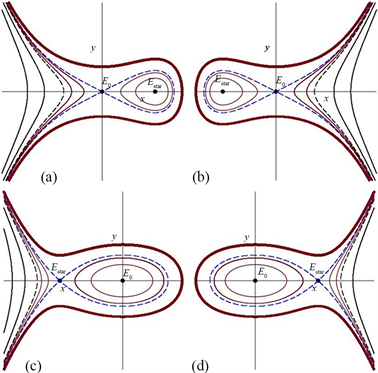
Figure 1. Trajectories with
: (a)
; (b)
; (c)
; (d)
图1.
时轨线:(a)
;(b)
;(c)
;(d)
3.
时的行波解分支
3.1. 平衡点的个数
引入四次方程
的判别式
,
,
,
,分为三种情形进行考虑:情形1.
或
,此时方程有一对二重实根和一对共轭复根,即仅有一个平衡点;情形2.
或
,此时方程有两个不等实根和一对共轭复根,即有两个平衡点;情形3.
或
,此时方程有两对不等的共轭复根,即没有平衡点。
如果改写方程
为
,则实根情况转化为两个函数
和直线
的交点情况。显然,当
(
)时函数
有最大(小)值
。以
为例,当
,
和
时,分别对应0个,1个和2个交点,即又回到了上述三种情形。类似的,可以说明
时的三种情形。图2说明了以上分析。
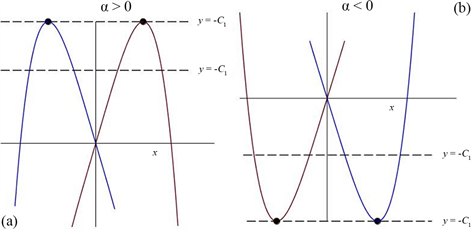
Figure 2. The figures of functions
and
: (a)
; (b)
图2. 函数
与直线
的图象:(a)
;(b)
3.2. 情形1:
或
此时唯一的平衡点
为高阶奇点,因Jacobi矩阵
的行列式和迹均为零。取变换
,
和
,
,
,
,化为系统
,
。 (6)
这等价于系统
,
,因此
是余维至少为4的尖点 [20] 。轨线经过该奇点的临界值为
,
与c同号。表1说明了参数间关系,+﹑−分别表示大于﹑小于零(下同)。

Table 1. Relationship of parameters with α = α 0 ( Δ x = 0 )
表1.
(
)时参数间关系
图3则给出了
(
)时的四种轨线图。
3.3. 情形2:
由Sylvester结式知轨线经过平衡点时的临界值h满足方程
, (7)

Figure 3. Trajectories with
(
): (a)
; (b)
; (c)
; (d)
图3.
(
)时轨线:(a)
;(b)
;(c)
;(d)
相应的判别式为
,其中正数
。
当
时
,方程
有三个实根,因判别式
,
,
,其中正数
,
但一个二重实根
为增根,两个一重实根
和
分别对应平衡点
和
,相应平衡点处Jacobi矩阵的行列式分别为
和
。表2说明了
时参数间关系。
Table 2. Relationship of parameters with α = α 1
表2.
时参数间关系
当
时
不存在,方程
仅有两个实根。引入变换
,方程
化简为
, (8)
显然
有两个实根
和
,即有
,
。由Jacobi矩阵的行列式
可知平衡点
的类型,
,另见表3。当然,利用
的符号也可说明。再考虑轨线过平衡点
时的临界值
,简记
和
,
,作差有
,其中对称函数
可得
和
的大小关系,见表3 (同表2)。图4给出了
时四种轨线图。
Table 3. Relationship of parameters with Δ x > 0 and α ≠ α 1
表3.
且
时参数关系
3.4. 情形3:
显然
。当
(或
)时轨线开口向左(或右),每支轨线的定义区间为
(或
),且唯一的
随h增大而增大(或减小),而行波解是无界的。图5给出了
时两种轨线图。

Figure 4. Trajectories with
: (a)
; (b)
; (c)
; (d)
图4.
时轨线图:(a)
;(b)
;(c)
;(d)
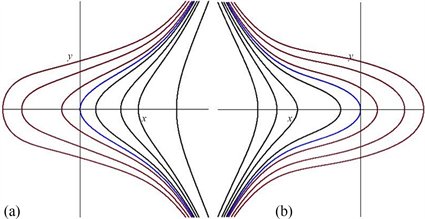
Figure 5. Trajectories with
: (a)
; (b)
图5.
时轨线:(a)
;(b)
4. 行波解和对称
4.1. 行波解的分类及形式
为方便讨论行波解的形式,取变换
,
,由
可得标准形式
,
, (9)
其中
是积分常数。根据五阶多项式完全判别系统法 [21] ,引入判别式
,
,
,
,
,
,
可对行波解作分类并形式上给出解。
情形1:
,
,
。
这种情形存在,例如取
,
。此时
,其中
,
,
。当
时行波解的形式为
,(10)
其中
,
。
情形2:
,
。
此即为
或
的情形,且
,其中
,
,
。当
时,行波解的形式为
(11)
其中
,
,
,辅助函数
,
。
情形3:
,
。
这种情形存在,例如取
,
。此时
,a,
,
及
是实数。当
时,如果
且
,则行波解的形式为
; (12a)
如果
,则行波解的形式为
; (12b)
如果
,则行波解的形式为
。 (12c)
其中
,
,
。
情形4:
。
这种情形存在,例如取
,
。此时
,其中
,
,
,
及
是实数,行波解的形式为
。 (13)
情形5:
,
,
。
这种情形存在,例如取
,
。此时
,a,
,
,
及
是实数,行波解的形式为
。 (14)
注意,
且
的情形不存在,因要求
,否则
时退化为情形3。当
时,仅有情形3﹑情形4和情形5成立,因
。总之,行波解的形式由上述五类情形所规定。
4.2. 对称
引入变换
,
充分小,原方程的对称
应满足方程
, (15)
其中算子
定义为
。同上,考虑行波解
,并引入mapping and deformation关系 [22]
,方程(15)可化为三阶ODE
, (16)
其中辅助函数
。上述常微分方程的通解形式为
, (17)
其中
﹑
和
是积分常数,而u是原方程(4)的行波解。因此有了以上行波解的分类工作,理论上是可以得到相应的对称
。
4.3. 近似解
Runge-Kutta法可以给出解的数值结果,但无法给出解的表达式;尽管同伦微扰法(HPM) [23] 和Adomian分解法(ADM) [24] [25] [26] [27] 可以给出近似解的幂级数表达式,对于结点情形尚可以采用,但收敛速度较慢,特别是在周期解情形,而一个物理系统中又常常考虑有界的行波解。给定初值
,
,对于系统(5),按文 [28] ,由HPM和ADM给出的前五阶近似解为
(18a)
(18b)
当然,也可用幂级数展开法得到上述结果。以
,
,
为例,图6将这两种方法所得近似解与Runge-Kutta 45法进行比较,结果表明当
比较小时,近似可以接受。

Figure 6. Approximate solutions via HPM (black solid line), ADM (black dot line) and Runge-Kutta 45 method (red solid line): (a)
; (b)
图6. 同伦微扰法(黑色实线)﹑Adomian分解法(黑色点线)与Runge-Kutta 45法(红色实线)所得近似解:(a)
;(b)
鉴于行波解的表达式如此复杂,以及ADM和HPM的局限性,参照文 [29] [30] ,这里给出相应多模态近似解的计算方法。仍以上述
为例,取多模态近似解
,其中w为频率,
。与文 [16] [29] [30] 不同,在一个周期
上对Hamilton函数
积分有
,即可得耦合代数方程组
, (19a)
, (19b)
。 (19c)
结合初始条件
有解
,
,
及
。图7(a)刻画了近似解(黑色实线)与实际解(红色点线)的近似程度,在前几个周期内两者非常吻合;图7(b)刻画了所得近似轨线(黑线)与实际周期轨(红线)之间的近似程度,近似程度很好。总之,这是一种有效的近似求解方法。类似的,理论上可以作出其它情形下的近似周期解。
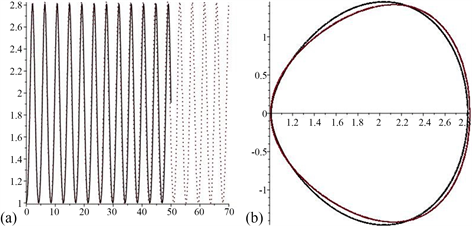
Figure 7. (a) Multimode approximate solution (black solid line); (b) periodic trajectory via multimode approximate solution (black line)
图7. (a) 多模态近似解(黑色实线);(b) 由多模态近似解所得周期轨(黑线)
5. 幂律n ZK方程的行波解
结合前几节的结果,类似于
时数形结合法对平衡点个数的讨论,本节研究幂律n ZK方程(2)及行波解对应的系统
,
。 (20)
首先考虑n为奇数情形。当
时,有2个平衡点
,
,
。结合
的符号知:若
,则
是鞍点,
是中心;若
,则
是中心,
是鞍点。当
时,只有1个高阶奇点
,因
,同样是余维至少为4的尖点。当
时,没有平衡点。这样,平衡点可有0个﹑1个或2个。
再考虑n为偶数情形。同上,如果
,则仅有一个平衡点,因
的单调性。如果
,则:当
时,平衡点有3个;当
时,平衡点有2个;当
时,平衡点仅有1个。注意,
的情形包含在
的情形中。显然,可结合
的符号得到平衡点的类型(鞍点﹑中心或尖点),总结如下,与文 [16] 一致。
当
时,若
,则唯一的平衡点
是中心;反之,
时
是鞍点。
当
时,设三个平衡点为
,
,
。若
(
﹑c同号),则
﹑
是中心,而
是鞍点;若
,则
﹑
是鞍点,而
是中心。
当
时,设双曲平衡点为
,退化平衡点为
,
或2,
,
,同上
是余维至少为4的尖点;而
(
﹑c同号)时
是中心,反之,
时
是鞍点。
总之,平衡点可有1个﹑2个或3个。图8描述了
时利用数形结合法对平衡点个数的分析。
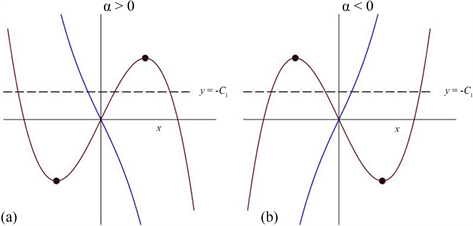
Figure 8. Analysis of number of equilibria with
: (a)
; (b)
图8.
时平衡点个数分析:(a)
;(b)
此外,可以得到首次积分
,当然,理论上也可使用除法定理获得,例如
时取
,
有
,其中
和
均为待定常数。这样,轨线经过平衡点
时临界值h由方程组
,
决定,即临界值满足(
)次代数方程
(21)
其中
,
,而行列式是
阶的。再结合高阶多项式完全判别系统法,理论上可说明h的实根情况及相应轨线的拓扑结构。同时,方程
的实根个数不少于方程
的实根个数,这也启发我们思考如下结论:
对于连续函数
和
,若连续的轨线族
由微分方程
给出,h为实数,关于参数h的方程
由方程组
所确定,则方程
的实根个数(重根按单重根计算)不少于方程
的实根个数?除去
的增根,两者的“剩余”实根个数是否相等(存在“剩余”实根间的一一映射)?
例如,对于实数域上的多项式
和
,
,n为正整数,h为实数,则需要考虑“结式方程”
和方程
的实根情况。
因此,在给定参数条件下,可获得相图分支及光滑孤立波解、周期波解的存在性定理,详述如下。
定理1:当n为奇数,
,
(或
)时,对应系统(20)连接鞍点
(或
)的同宿轨道
(或
),方程(2)有一个光滑孤立波解;对应系统(20)的周期轨道
,h位于
和
之间,方程(2)有一族周期波解。
定理2:当n为偶数,
,
时,对应系统(20)连接鞍点
和
的异宿轨道
,方程(2)有一个扭(反扭)波解;对应系统(20)的周期轨道
,h位于
(或
)和
之间,方程(2)有一族周期波解。
定理3:当n为偶数,
,
时,对应系统(20)连接鞍点
的同宿轨道
,方程(2)有两个光滑孤立波解;对应系统(20)环绕平衡点
﹑
和
的大范围周期轨道
,
,方程(2)有一族周期波解;对应系统(20)分别环绕中心
和
的两族周期轨道
,h分别位于
和
及
和
之间,方程(2)有两族周期波解。
定理4:当n为偶数,
,
时,对应系统(20)的周期轨道
,
,方程(2)有一族周期波解。
最后,原方程(2)的对称
应满足方程
, (22)
类似的,引入关系
后,其一般的表达式同(17),但
,而u是原方程(2)的行波解。
6. 总结与讨论
文 [16] 的工作隐含了特征为0的实数域R上椭圆曲线
的若干思考。结合文 [6] [7] [16] ,本文整体上定性分析了幂律n (
且为正整数)ZK方程行波解及其性质,对于其它非线性偏微分方程的研究具有一定参考意义,如(2 + 1)维广义Zakharov-Kuznetsovmodifiedequal-width (ZK-MEW)方程 [31]
。
致谢
感谢编辑和审稿人的工作,感谢温州大学赵敏老师和戴传军老师,感谢乐清市柳市镇第三中学郑孟老师和赵淑静老师,感谢乐清市城南中学陈谱锦老师。
参考文献