1. 引言
由感应线圈、前置放大电路、磁芯构成的感应式磁传感器(Induction Magnetometers, IM)因具有低功耗、高灵敏度、高分辨率、携带方便等特点 [1] [2] [3] [4] ,在大地电磁法勘探工作中常承担着磁场信号的测量任务。感应式磁传感器的噪声水平是决定其性能优劣的重要指标。研究与实践表明,感应式磁传感器总噪声主要由感应线圈的直流电阻热噪声、前置放大电路的电压噪声、前置放大电路的电流噪声经感应线圈阻抗产生的电压噪声等三部分构成 [5] [6] 。在感应线圈的直流电阻不发生改变的情况下,设计出一款低电压噪声、低电流噪声的前置放大电路成为了降低感应式磁传感器噪声水平的主要途径。
近年来,国内外许多学者对感应式磁传感器的前置放大电路进行了优化设计。在Asaf Grosz采用集成运算放大器搭建的前置放大电路中 [7] ,其电压噪声高达55 nV/√Hz@1kHz,电流噪声达到了100 fA/√Hz@1kHz。而C Coillot设计的CMOS集成运算放大器其噪声水平得到了显著的改善 [4] ,对应的电压噪声为3 nV/√Hz@10kHz,电流噪声为20 fA/√Hz@10 kHz。H. C. Séran、Yong Liu、Kai Liu等人采用低噪声结型场效应晶体管(JFET)设计的放大电路均有具较低的噪声水平 [5] [8] [9] 。其中,由Kai Liu设计的放大电路最具代表性,其当频率大于10 Hz时,其等效输入电压噪声低于1 nV/√Hz,而等效输入电流噪声为10 fA/√Hz@1kHz,但其带宽的上限截止频率仅为10 kHz。而Hongyu Shi、Bin yan、Li Jiawei等人分别设计的低噪声斩波放大器具有较高的电流噪声,且该放大器仅适用于低频感应式磁传感器的信号放大 [6] [10] [11] 。尽管前人设计出了很多性能优异的前置放大电路,但因其噪声水平较高、带宽上限频率低等因素,适用于测量频率范围为100 Hz~1 MHz感应式磁传感器的前置放大电路却很少。
本文基于低噪声JFET (JFE2140)以及低噪声的高速集成运算放大器(OPA211)设计并制作了一款电压噪声为1.8 nV/√Hz@100kHz,电流噪声为2.9 fA/√Hz@100kHz,固定增益为60 dB,带宽为30 Hz~500 kHz的前置放大电路。
2. 感应式磁传感器的基本原理
2.1. 感应线圈的频率响应
感应式磁传感器主要由磁芯、前置放大电路、感应线圈组成。基于法拉第电磁感应定律,当绕制有感应线圈的磁芯处于交变磁场当中,感应线圈的感应电压在时间域可以表示为:
(1)
当交变磁场为谐变场时,感应电压在频率域则变为:
(2)
在公式(1)和公式(2)中,N为感应线圈的绕制匝数,Φ为闭合感应线圈的磁通量,μapp为磁芯的视磁导率,其主要与磁芯材料以及磁芯的几何参数有关,A为磁芯的有效横截面积,B为平行于磁芯方向的交变磁场,f为平行于磁芯方向的交变磁场变化频率,j为虚数单位。
感应线圈通常等效为一个R,L,C振荡电路(图1),其中,R为感应线圈的直流电阻,L为感应线圈的电感,C为感应线圈的分布电容。前置放大电路的输出电压与感应线圈产生的感应电压之间的传输函数为:
(3)
其中,Vo(f)为前置放大电路的输出电压,G(f)为放大器增益。联立公式(2)和公式(3),可以得到前置放大电路的输出电压与平行于磁芯方向的交变磁场之间的传输函数为:
(4)
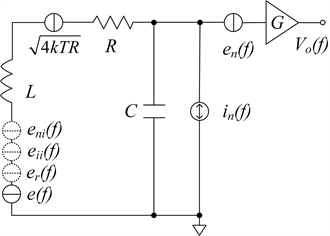
Figure 1. Equivalent circuit model of an induction coil and its noise source distribution
图1. 感应线圈的等效电路模型及其噪声源分布
2.2. 传感器的噪声分析
感应式磁传感器的噪声是衡量其性能的重要指标。为了降低感应式磁传感器的噪声水平,提高对微弱交变磁场信号的检测精度,分析感应式磁传感器内部的噪声源分布显得尤为重要。
正如图1所示,感应式磁传感器内部的噪声通常由以下几部分构成 [7] :
放大器的电压噪声en折合到感应线圈的输入端为:
(5)
由放大器的电流噪声in通过感应线圈阻抗产生电压噪声折合到感应线圈的输入端为:
(6)
由感应线圈的直流电阻产生的热噪声为:
(7)
其中,k = 1.380649×10−23 J/K,为玻尔兹曼常量,T为热力学温度。
由于上述噪声不是同源的,因此总的噪声可以表示为:
(8)
将公式(2)带入公式(8)则可以得到感应式磁传感器的等效输入磁场噪声为:
(9)
为了直观地展示感应式磁传感器内部各噪声源对总噪声的贡献,本文在公式(5)至公式(8)的基础之上,并给定如表1所示的参数,得到了如图2所示的各部分噪声的功率谱密度。

Table 1. Selected parameters in induction magnetometers
表1. 感应式磁传感器中的部分参数
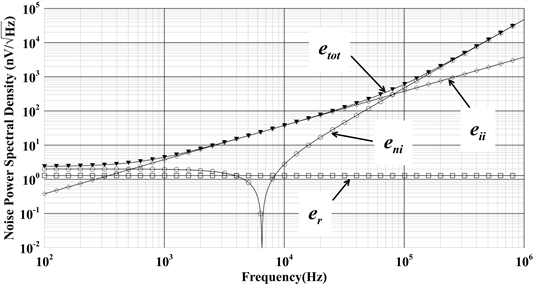
Figure 2. Internal noise sources in Induction Magnetometers as a function of frequency
图2. 感应式磁传感器内部噪声源与频率的关系
从图2可以看出,在100 Hz~1 kHz频率范围内,感应式磁传感器的总噪声主要由感应线圈直流电阻的热噪声和前置放大器的电压噪声构成;在1 kHz~100 kHz频率范围内,感应式磁传感器的噪声水平几乎取决于前置放大器的电流噪声;当频率高于100 kHz时,前置放大器的电压噪声又占据感应式磁传感器总噪声的主导地位。上述分析说明,在感应线圈参数不变的情况下,设计出一款低电压噪声、低电流噪声的前置放大器以降低感应式磁传感器在100 Hz~1 MHz的噪声水平具有重要意义。
3. 前置放大电路的设计与仿真
3.1. 关键器件的选型
3.1.1. 低噪声JFET
在多级放大器级联的放大电路中,由弗里斯公式给出的放大电路总噪声系数为:
(10)
其中,
为各级放大器的噪声系数,
为功各级放大器的功率增益。
公式(10)说明,当第一级放大器的增益足够大,放大电路的总噪声系数主要由第一级放大器的噪声系数决定 [12] 。因此,输入级放大器的设计以及器件的选型对整个放大电路来讲是至关重要的。
JFET因具有输入电压噪声、低1/f噪声转折频率、低输入电流噪声、高输入阻抗等特点,常用于分立器件搭建的放大电路中 [13] 。本文选择来自德州仪器(Texas Instruments, TI)的JFE2140,该器件的电压噪声仅为1.1 nV/√Hz@1kHz,1/f噪声转角频率约为10 Hz,电流噪声低至1.6 fA/√Hz@1kHz。JFE2140出色的噪声水平可确保设计的放大电路不会有过高的电压噪声和电流噪声。
3.1.2. 低噪声集成运算放大器
集成运算放大器起到对信号的二次放大作用,为了保证后级放大器不会对放大电路的总噪声带来额外的影响,因此在选择集成运算放大器时,也应选择低电压噪声、低电流噪声、低失调电压和带宽合适的高速集成运算放大器。本文选用了TI的OPA211集成运算放大器,该放大器的电压噪声仅为1.1 nV/√Hz@1kHz,电流噪声为800 pA/√Hz@1kHz,失调电压最大仅为125 μV,增益带宽积高达80 MHz,压摆率达到了27 V/μs。优异的性能使OPA211非常适合本文针对100 Hz~1 MHz感应式磁传感器设计的前置放大电路。
3.2. 放大电路的设计
为了满足感应式磁传感器在100 Hz~1 MHz的测量需求,本文设计了如图3所示的低噪声放大电路。放大电路采用两级放大结构,其理论带宽为100 Hz~1 MHz,并在带宽内提供60 dB的稳定增益。
输入级为基于两个JFET差分对管(J1和J2)和一个集成运算放大器(U1)构成的差分放大电路,两个JFET差分对管的源极接入了一个大小为Is的电流源,此电流源除了为JFET提供稳定合适的静态工作点之外,还起到了提高放大电路共模抑制比的作用 [14] 。此外,输入级放大器采用串联电压负反馈的方式以获得固定的50倍线性增益,同时增强了放大电路的稳定性。
在输入级放大电路中,当三极管Q1和Q2完全一致且二者的电流放大系数较大时,电流源Is的计算公式为:
(11)
而JFET的静态工作点对应的源极–漏极电流为:
(12)
其中,UBE0 = 0.7 V,为三极管的基极与发射极之间的电压。在给定如表2所示的放大电路的电气参数值,可以计算得到此时的源极–漏极电流IDS = 2 mA。
在采用串联电压负反馈的输入级放大器中,其增益为:
(13)
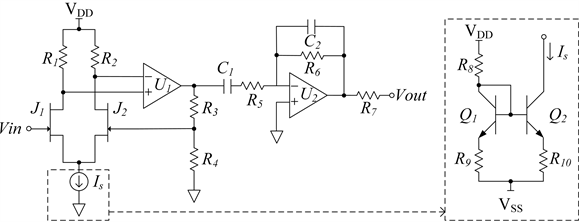
Figure 3. The low-noise preamplifier designed in this paper
图3. 设计的低噪声前置放大器
Table 2. Selected parameters in the preamplifier
表2. 前置放大电路中的部分参数
第二级放大器为基于一个集成运算放大器构成的有源低通滤波器,该级放大电路在滤除高频噪声的同时,可提供20倍的固定增益。输入级放大器和输出级放大器之间采用电容耦合的方式,从而减小输入级放大器的直流电压对输出级放大器的影响。电路中,R5,C1构成的高通滤波器和R6,C2,U2构成的低通滤波器组成了一个带通滤波器,其下限截止频率为:
(14)
上限截止频率为:
(15)
而该级放大电路在平坦处的增益为:
(16)
根据表2所给出参数值,可以计算出本文设定放大电路下限截止频率为fL = 100 Hz,上限截止频率为fH = 1 MHz,即该放大电路的带宽为100 Hz~1 MHz。
4. 前置放大器的测试
4.1. 增益测量
在前文所述的前置放大电路设计基础之上,本文制作出了前置放大电路的实物,并采用由日本NF公司生产的高精度频率特性分析仪(FRA5087)对其进行了正弦波扫频,得到了前置放大电路的增益测试结果。同时,为了验证设计的前置放大电路是否合理准确,本文采用亚德诺半导体(Analog Devices, Inc., ADI)所开发的LT-Spice仿真软件对前置放大电路的增益进行了仿真。
如图4所示,前置放大电路增益的仿真结果和测量结果在带宽内均具有平坦稳定的60 dB增益,二者十分吻合;而前置放大电路的−3 dB带宽测量值为30 Hz~500 kHz,与理论的−3 dB带宽10 Hz~1 MHz有略微的差距。由于测量环境的影响,电路板在测试的过程中会受到外界的电磁干扰,这会降低目标信号的信噪比,因此实际的增益曲线会在个别频点有所跳动,但不会对前置放大电路本身产生影响。
考虑到实际的电阻、电容元器件具有误差,同时电路板连线与GND之间存在分布电容,测量结果和仿真结果是在允许误差范围内的。上述结果也验证了前置放大电路设计的正确性和合理性,实际的前置放大电路具有宽广的30 Hz~500 kHz带宽,带宽内具有稳定的60 dB线性增益。
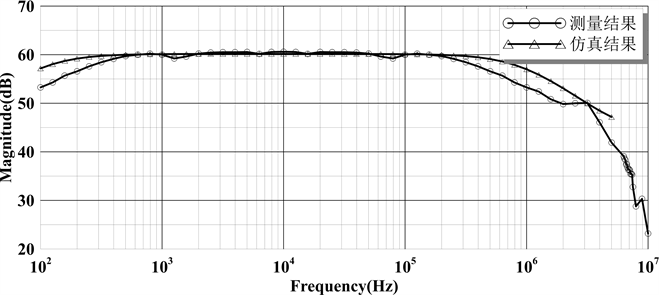
Figure 4. Gain measurement results and simulation results of the preamplifier
图4. 前置放大电路的增益测试结果与仿真结果
4.2. 等效输入电压噪声
本文将前置放大电路的输入端短接到GND,并将其密封于一个金属屏蔽盒内,以减小外界的电磁干扰。采用一款高精度、双通道动态信号分析仪(SR785)测量得到前置放大电路在输出端的电压噪声eno(f)。假设前文所测量得到的前置放大器的增益为G(f),则前置放大电路的等效输入电压噪声为:
(17)
将所测量的数据带入公式(17)计算得到便得到了如图5所示的等效输入电压噪声功率谱密度。前置放大电路的等效输入电压噪声为1.8 nV/√Hz@100kHz,当频率小于10 Hz时,理论的电压噪声主要为前置放大电路的1/f噪声,由于低通滤波器下限截止频率实际为30 Hz,前置放大器的测量噪声在低于30 Hz时低于0.2 nV/√Hz,说明本文所设计的前置放大电路在30 Hz~50 kHz范围内内不受低频噪声影响。值得说明的是,即便前文所提及的OPA211电压噪声仅为1.1 nV/√Hz@1kHz,该电压噪声水平已经优于了前置放大器的电压噪声水平,但其电流噪声达到了800 pA/√Hz@1kHz,这是OPA211或其它低电压噪声集成运算放大器不适用于高频感应式磁传感器的微弱信号放大的主要原因。
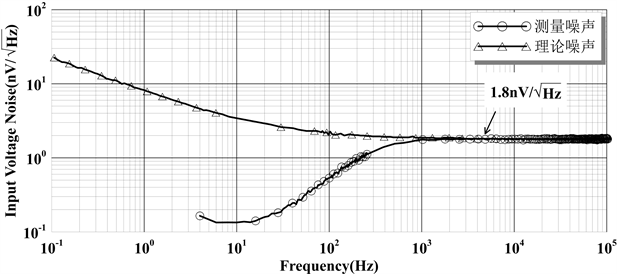
Figure 5. Equivalent input voltage noise measurement results of the preamplifier
图5. 前置放大电路的等效输入电压噪声测试结果
4.3. 等效输入电流噪声
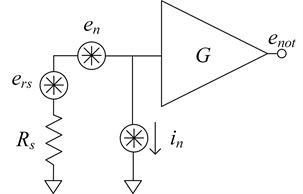
Figure 6. Equivalent input current noise measurement principle of the preamplifier
图6. 前置放大电路的等效输入电流噪声测量原理
为了测量斩波放大器的等效输入电流噪声,我们在其输入端串联了一个电阻Rs并短接到GND (图6),则放大电路的等效输入电流噪声可以表示为:
(18)
其中,entot为放大器输入端串联有电阻时在输出端的总噪声,Rs的取值为10 MΩ,这样的阻值可以保证由电流噪声通过两个电阻Rs产生的电压噪声大于背景噪声,使测量的电流噪声更加准确 [15] 。
采用动态信号分析仪(SR785)测量并计算得到前置放大电路的等效输入电流噪声功率谱密度。如图7所示,前置放大电路的等效输入电流噪声仅为2.9 fA/√Hz@100kHz,当频率小于前置放大电路的下限截止频率时,等效输入电流噪声大于2.9 fA/√Hz并随频率的减小而增大。
前置放大的电流噪声由输入级JFET的散弹噪声(Shot Noise)引起,散弹噪声可以表示为:
(19)
其中,q = 1.602 × 10−9 C,为电子电荷,IB为JFET的偏置电流。
依据JFE2140的数据手册,其偏置电流为2 pA,带入公式(19)得到前置放大电路的理论电流噪声为1.8 fA/√Hz@100kHz,该值低于实际测量值。实际上,由于差分对管的匹配存在误差,实际的偏置电流应大于2 pA,这是造成测量结果大于理论值的主要原因。
前置放大电路的低电流噪声水平,已经优于了市面上绝大多数的集成运算放大器,因此,本文设计的前置放大电路更适合高频感应式磁传感器的微弱信号放大。
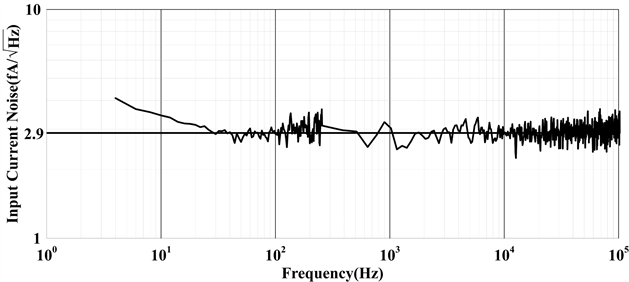
Figure 7. Equivalent input current noise measurement results of the preamplifier
图7. 前置放大电路的等效输入电流噪声测试结果
5. 结论
本文从感应式磁传感器的原理出发,分析了其内部的噪声源在不同频段对总噪声的贡献:在100 Hz~1 kHz频率范围内,感应式磁传感器的总噪声主要来源于感应线圈的直流电阻热噪声以及前置放大电路的电压噪声;在1 kHz~100 kHz频率范围内,感应式磁传感器的总噪声主要来源于前置放大电路的电流噪声经感应线圈阻抗作用后所产生的电压噪声;当频率高于100 kHz时,感应式磁传感器总噪声主要来源于前置放大器的电压噪声。
根据感应式磁传感器对前置放大电路的需求特点,采用低噪声JFET放大器(JFET21410)与低噪声高速集成运算放大器(OPA211)设计了一款低噪声、低功耗的前置放大电路,该放大电路具有稳定的60 dB线性增益,其带宽为30 Hz~500 kHz,等效输入电压噪声为1.8 nV/√Hz@100kHz,等效输入电流噪声为2.9 fA/√Hz@100kHz。测量结果表明,本文所设计的前置放大电路适用于100 Hz~1 MHz的感应式磁传感器中的微弱磁场放大。