1. 引言
在水声工程中,水流测量是其中一个重要的组成部分,水流场的实时监测和预报是各项水上活动的关键 [1] 。基于声学多普勒流速剖面仪(Acoustic Doppler Current Profiler, ADCP)的声学多普勒测流技术具有速度快、精度高、分辨率高、范围广等优点,广泛运用于河流和海洋工程的测流领域 [2] [3] 。ADCP测流应用非常广泛,但是也存在固有的局限性,例如无法实现非均匀湍流的测量以及盲区和旁瓣的干扰,将多波束声纳和多普勒测流技术相结合的声学多波束测流技术的出现则克服了ADCP测流的固有缺陷,能实现水平非均匀流场的有效测量,收发分置的方式理论上不存在盲区,接收波束形成能有效抑制旁瓣干扰,且具有更宽的测量范围,一次测量便可获得整个扇面的流场信息,实现了从分层到空间测量的突破 [4] [5] 。
流速数据的影响因素往往来自多方面,主要的误差源包括:声速测量误差、多普勒测量误差、流速转换误差、姿态数据测量误差等系统误差、还有各类辅助设备(温度传感器、压力传感器、姿态传感器等)的随机误差等 [6] 。最为关键的还是径向多普勒的测量精度,直接影响针对径向流速数据的分析和后续三维流速的合成,因此针对径向流速数据的相关处理至关重要,包括对异常值的剔除,数据补偿以及滤波处理等。
由于多波束流体回波数据相比常见的固定波束ADCP更加复杂,当多波束系统进行水流测量时,水流处在不断的运动变化中,散射体速度的不一致和非均匀等不稳定因素将会使得部分径向流速数据和回波强度数据质量较低。因此,需要提出相应的数据处理方法改善数据的质量,减小测量的不确定性,对于获取精确完备的流场时空分布特征至关重要。为此,本文提出了一种基于自相关估计和回波强度联合加权的多波束分层数据预处理方法。
2. 多波束测流系统模型
多波束测流试验系统利用多波束声纳进行测流的原理如图1所示,发射和接收阵采用互相垂直的米尔斯交叉阵,基阵的安置方式为固定在水底,换能器向上发射和接收波束,发射波束是一个窄长的扇面,接收阵列接收整个波束空间的叠加回波,接收端按不同角度进行波束形成获得多个回波信号,然后对每个波束按深度单元时间窗划分,形成交叉测量单元,最后通过相应的信号处理方法估计多普勒频移和回波强度信息,可形成一组扇形径向流速和回波强度面,从而获得整个测量扇面内的流场信息。
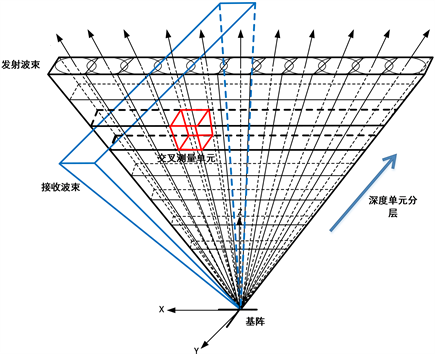
Figure 1. Schematic diagram of multi-beam sonar flow measurement
图1. 多波束声纳测流示意图
图2为多波束测流试验系统中数据处理整体流程。多波束测流试验系统获取的原始数据为各通道的回波采样数据,此外还需要一些辅助数据,包括温度、压力和姿态传感器的数据等。回波信号一方面在经过复自相关算法后得到各个波束各个深度单元层的频移信息,然后使用式(1)来计算径向流速,另一方面计算每一层信号幅度的均方值便可得到各个波束各个深度单元层的回波强度数据。

Figure 2. Multi-beam data processing flow
图2. 多波束数据处理流程
(1)
其中
为水体相对于换能器的径向流速,c为声波水中传播的速度,
代表多普勒频移,
为声波信号的频率,
为发射信号的波长。获取初始的径向流速和回波强度数据后需要进行预处理。预处理是对多波束分层径向流速和回波强度数据进行初步的处理,包括剔除异常值、数据补偿以及平滑滤波等,其目的是改善数据的质量,减少测量的不确定性。
3. 基于自相关估计和回波强度联合加权的多波束分层数据预处理
河流与海水中有许多微小颗粒和浮游生物,这些物体便是声波的散射体,正是由于散射体,系统才能接收到相应的回波。并认为散射体与水流是一体的,散射体的速度和流向代表了水流速度和流向,当系统和散射体之间存在相对运动时,接收回波信号的频率将会产生变化,发送与接收频率之差便是多普勒频移 [7] 。
实际水流环境中散射体速度不具有一致性,并且散射体也不是均匀分布,当水域中产生扰动时这种情况更加明显。回波多普勒频移是散射体速度的分量,若散射体速度一致性不好,那么速度的分布范围就宽,多普勒频移的波动范围也随之变宽,回波谱宽也随之展宽,导致多普勒频移估计方差增大;若散射体浓度较小,那么某个深度单元层的回波信号会因强度过低而被噪声淹没,导致回波信噪比的明显下降。若散射体浓度太大,对深层水体回波的遮挡也会导致回波信噪比的降低,进而导致多普勒频移估计方差增大。
假定对同一参数有多个独立观测结果,这些观测结果由于种种原因可能具有不同的测量误差,可基于加权最小二乘准则对这些观测结果进行数据融合,获得均方误差最小的综合结果 [8] [9] 。设
和
是对某一参数
的两次独立观测结果,对
的两次测量是无偏的,但是具有不同的测量方差
和
。对
和
进行如式(2)所示的线性加权
(2)
求a和b,使得式(3)极小。
(3)
根据独立性的假设,求解式(3)可得:
(4)
其中
作为约束条件,用Lagrange乘子法 [10] 对(4)求条件极值可以得到:
(5)
由式(5)可知加权参数的大小与观测量的方差成反比,观测量的方差越大,加权量越小。因此对于N个独立观测结果
,加权因子向量
如式(6)所示:
(6)
其中,
为第i个观测量的方差,
。基于加权最小二乘获得的估计结果即为
。
多波束分层数据各独立观测分量的方差由自相关估计和回波强度两部分组成,如下式所示:
(7)
其中
为多普勒频移估计的方差,
为归一化的回波强度大小。对于任意非负可积的多普勒估计功率谱密度函数
,其一阶矩、二阶矩如下所示:
(8)
多普勒频移估计的方差
可以由功率谱二阶矩与功率谱一阶矩平方的差来估计,如式(9)所示:
(9)
由于信号的自相关函数
与其功率谱密度
为一对傅里叶变换对,如下式所示,其中
为相关延时:
(10)
由式(8)~(10)推导可得:
(11)
式(11)中
是此段回波信号噪声功率和信号功率的总和,
在实际信号处理过程中是将长度为T的一段回波的
段和
段进行复自相关运算结果的模值,与
具有相同量纲。因此,式 可重写如下
(12)
4. 仿真分析
以扩散式流场为例说明直接多帧平均与联合加权后的结果。实验数据取5次试验的结果。如图3(a)
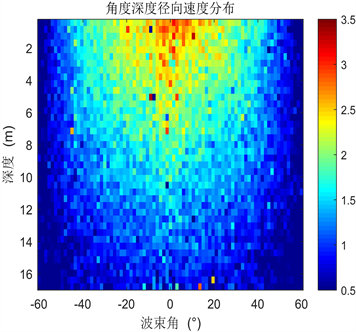 (a) 直接多帧平均
(a) 直接多帧平均 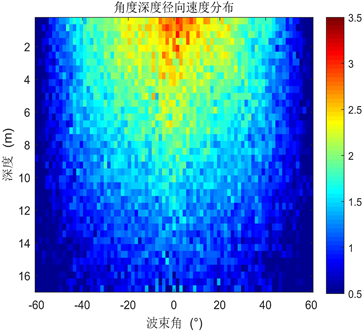 (b) 联合加权后的结果
(b) 联合加权后的结果
Figure 3. Radial velocity distribution at angular depth
图3. 角度深度径向流速分布
与图4(a)所示为直接多帧平均后的径向流速和回波强度的结果,由于数据质量差异的问题导致最终结果也呈现数据质量差异较明显的情况。如图3(b)和图4(b)所示为基于自相关估计和回波强度联合加权后径向流速和回波强度的结果,可以明显看出径向流速和回波强度数据质量较(a)图更为均匀。
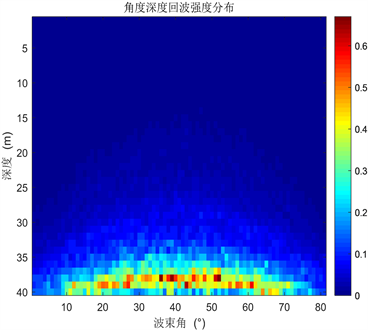 (a) 直接多帧平均
(a) 直接多帧平均 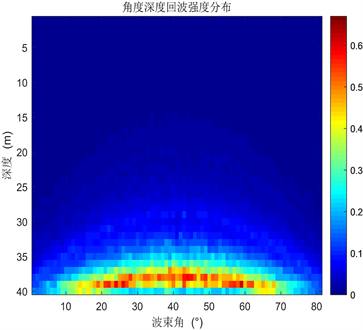 (b) 联合加权后的结果
(b) 联合加权后的结果
Figure 4. Intensity distribution at angular depth echo
图4. 角度深度回波强度分布
5. 结论
本文针对多波束水流测量过程中散射体速度不一致和分布非均匀带来的径向流速和回波强度数据质量差异问题,提出了基于自相关估计和回波强度联合加权的多波束分层数据处理方法,改善了多波束测流系统获取流场时空分布特征的稳健性。