1. 引言
伪装不是为了“隐身”,而是要与环境相协调。传统的伪装方式,如伪装网、迷彩涂层、迷彩服等,都属于被动式的 [1] ,它们无法根据外界变化调整自身形态,适用性较差。然而,随着伪装技术的进步,伪装方式正朝着主动的、自适应式的方向发展,伪装技术需要能够实时感知并响应复杂的外部环境。
小型无人机执行军事任务时,往往在亮空背景下飞行,其机身与天空形成明显的反差,容易被敌人视觉探测。而可见光波段对飞行器的探测效果,主要取决于飞行器与天空背景在亮度、色度和运动上的差异 [2] 。由于小型无人机的运动方式无法改变,因此只能通过改变无人机机身的亮度和色度来减少飞行器被探测的可能,其中,在无人机机身底部加装LED自动补光装置就是一种改变亮度和色度的方式。在亮空下,使用白光LED即可达到无人机机体色彩与天空背景色在一定程度的适应,达到与周围环境融合的效果 [3] 。本系统旨在从无人机机身呈现的亮度入手,设计一种减少小型无人机可见光波长范围内显眼性的方案。
2. 总体方案设计
本系统设计是为了进行亮空背景下的有效伪装,提升小型无人机的环境适应能力,能在现实战场中尽可能规避敌军的侦察。
2.1. 系统主要组成
随着光学探测技术的发展,电子伪装技术正逐渐得到发展与应用,它对传统伪装技术进行了扩展,其伪装系统的构成大致分为信息采集模块、数据处理模块和伪装模块。本文基于STM32的自动补光系统的构成也由这三大模块构成,其主要组成如图1所示,通过光学传感器对环境光进行实时采集,并转换成数字信号,经处理器处理后,通过STM32单片机给降压模块发送电信号,实时调节LED或其它发光元件的输入功率,以获得与环境相同的光通量。各模块功能如下:
1) 采集模块:实时追踪采集环境光,将采集到的光信号转换为数字信号;
2) 处理器:收发信号并处理数据,保证采集与降压模块的运行;
3) 降压模块:实时调节发光组件的输入功率;
4) 发光组件:输出不同强度的光;
5) 传输模块:将STM32单片机与PC端通信,以便在PC端进行手动控制。
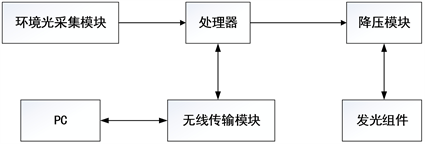
Figure 1. The main components of the system
图1. 系统主要组成
2.2. 系统设计原理分析
本系统主要针对于天空背景下的伪装,通过技术手段对需要伪装的目标进行亮度补偿,使之更好地与天空背景融合。
要实现伪装即伪装目标的光谱特性与天空背景的光谱特性一致,当伪装目标的光谱要低于天空背景光谱时,亮空背景下的飞行器自动补光系统将会对其光谱补偿,以尽量达到目标与背景的光谱特性一致。
设天空背景反射的光强为
,伪装目标反射的光强为
,对于伪装目标反射的光强可以用以下公式表示:
(2.1)
其中,
为伪装目标的反射率,
为天空自然光入射光强。
当伪装目标反射的光强
与天空背景反射的光强
相同时,伪装目标将难以被光学侦察,从而实现了伪装。但当两者的光强
与
不同时,则需要通过补偿的手段将伪装目标的反射光强提高,对于本系统而言,对伪装目标加装了自动补光系统以后,伪装目标反射的光强可以表示为:
(2.2)
其中,
为每个LED的发光强度控制参数,
为LED发出的最大光强,n为LED的数量 [4] 。通过多个LED的同时发光,从而补偿伪装目标反射光强不足的问题,以尽量实现伪装目标反射的光强
与天空背景反射的光强
的接近。
3. 系统硬件设计
3.1. 硬件总体设计
整个自动补光系统的物理设计模型如图2所示,该系统以STM32F103C8T6作为主控芯片集成晶振电路、电源电路和复位电路等形成一个微控制器,并包括型号为BH1750FVI的光敏传感器,型号为DL-22的Zigbee无线通信模块,以及BUCK3603为降压模块和电源模块等。系统采用锂电池组作为系统的电源模块,选用5 V的锂电池通过USB接口从而为STM32微控制器供电,并通过稳压电源芯片将5 V降至3.3 V,为需要3.3 V输入的接口供电。另外选用29.6 V的锂电池组作为降压模块和LED灯板供电,为照明提供稳定的电源。光传感模块实时采集环境光照度信息,经过微控制器处理后通过自适应补光算法,从而控制降压模块对LED灯板输出的功率。同时,也可将光照度信息通过Zigbee无线传输模块发送至PC端,将采集的光照度信息进行实时显示。
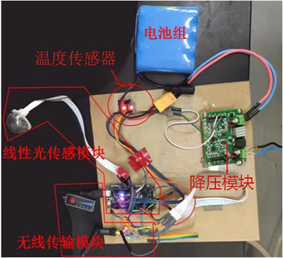
Figure 2. System physical connection diagram
图2. 系统实物连接图
3.2. 微控制器模块
在微控制器模块的选择上,从成本与功耗等多方面考虑,使用的是STM32F103C8T6单片机,该单片机于2007年由意法半导体发布,是基于ARM Cortex-M3内核的32位控制器,最大工作频率为72 Mhz [5] 。其内置高速存储器,集成了IIC\SPI\USART\CAN等多种通讯接口。该单片机包含多个定时器,可以输出多个PWM信号,其USB通信接口可用于最小系统板和其他设备进行USB通信,也可用于供电。微控制器模块的最小系统板主要包括芯片、LED灯控制电路、启动模式选择电路、电源控制电路、SWD接口电路和复位控制电路等 [6] 。STM32单片机及周围模块框图如图3所示。
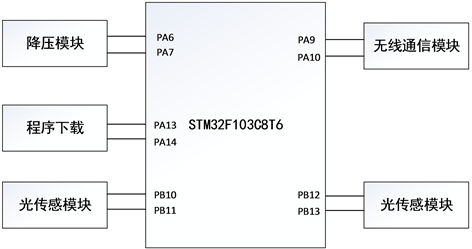
Figure 3. STM32 microcontroller and surrounding modules
图3. STM32单片机及周围模块
STM32单片机通过编辑器软件配置PA6、PA7端口,定义其定时器的频率以及PWM信号的占空比变化函数,LED驱动模块可根据输入的PWM信号来调节LED灯板的输入电流大小,从而改变LED灯板亮度。
3.3. 光敏传感模块
目前市面上用于光照度测量的传感器主要有三种,其中包括光敏电阻传感器、光敏二极管/三极管和光伏电池。光敏二极管类型的传感器具有高灵敏度、低噪声、低功耗、高可靠性等特点,并且其抗干扰能力强,可以抵抗外界干扰,确保测量数据的准确性,较其他类型的传感器有明显优势,因此选用以光敏二极管为主要部件的BH1750FVI型光敏传感器用于光照度测量。光照度传感器中的光敏二极管可通过光生伏特效应将光信号转换为电流,且光照强度越强产生的电流越大。当无光照时光敏二极管会存在暗电流,在设计和制作光电二极管时应尽量减小暗电流来提升器件对光照的灵敏度 [7] 。BH1750FVI型光敏传感器采用的是IIC通信协议,通过IIC总线与STM32单片机进行通信,该协议是一种双向有线通信协议,通过一条数据线SDA和一条时钟线SCL实现。IIC通信的具体步骤有五步:主机和从机之间建立连接、主机发送从机的地址、主机发送数据给从机、从机接收主机发送的数据、主机和从机之间断开连接。BH1750FVI型光敏传感器的内部包含了VCC、DVI、SCL、SDA、ADDR和GND六个管脚。光敏二极管(PD)实时感知周围环境光照强度,随后通过运算放大器(AMP)将光照出生的电流信号转换成电压信号,经过模数转换(ADC)获取16位数字数据,最后依靠光强度计算和IIC总线接口(Logic + IIC Interface)将处理和的光信号数据通过IIC协议发送给STM32单片机。
3.4. 降压模块
LED亮度的大小由其经过的电流大小决定,且只有通过正向电流时点亮,为了实现其亮度随环境光照强度的变化而改变,需要利用到降压模块来调节LED的输入功率。降压模块可以实现调节电压的功能,降低锂电池提供的高电压用于LED运行,并且由于LED只需改变微小电压就会产生较大的电流变化,因此LED需要保证为电流恒定状态。最终本系统选择了BUCK3603这一款DC-DC恒流驱动模块,其工作稳定,功率大,分辨率高,输出电压和输出电流满足LED的工作状态需求 [8] 。该LED驱动模块加入了高速微控制器的精密测量计算,可以精确调节输出电压电流大小,内置10组存储位置,可随时存储、调出参数,方便使用,且具有恒压,恒流状态。
3.5. 无线传输模块
在上位机与下位机之间调试的过程中,通过Zigbee无线通信进行数据的收发,本系统用到的Zigbee无线通信模块为DL-22模块,其内部采用以CC2530无线射频芯片作为主控芯片,该模块的工作频带为2.4 GHz,其通信距离最大为1000米,可以通过无线将两个或者多个串口连接起来。本系统利用到两个Zigbee无线通信模块,一端连接至STM32单片机处,另一端连接至PC,将系统采集的周围环境信息实时显示在电脑上,具体实现流程如图4所示。

Figure 4. Zigbee wireless communication schematic
图4. Zigbee无线通信示意图
3.6. LED灯板
在LED灯板的选择上,主要从功率和LED的发光强度两方面考虑。由于LED发光板需要搭载在小型无人机上,其供电续航能力有所欠缺,因此发光板功率不宜过大。又因为在户外条件下,晴天的环境光照度在10000~100,000 Lx,阴天的环境光照度在100~10,000 Lx [9] ,LED发光板能够满足这两个区间内的照度需求。
基于功率和照度的考虑,最终选取了一款多灯珠LED发光板,该灯板以5颗灯珠为一组串联,通过并联50组为一回路,整个灯板为双回路结构。该LED发光板的光照强度可从数千勒克斯至十余万勒克斯变化,其功率也从不足一瓦到十余瓦变化,其功率与照度的变化情况如表1所示。

Table 1. The relationship between LED light-emitting plate power and light intensity
表1. LED发光板功率与光照强度对照关系
4. 系统软件设计
系统软件程序设计使用C语言编程,采用Keil 5 MDK编辑器为STM32F103C8T6进行编译。系统上电后进行单片机初始化,光敏传感器采集周围环境光照强度,并将数据和指令通过DL-22模块通过收发引脚与微控制器进行传输,根据光照强度实时调控LED发光亮度。系统软件设计的主程序流程图如图5所示。
本系统采用BH1750FVI型光敏传感器,根据程序流程设计,对光敏传感器部分程序进行复位、读取数据、解析光照强度数据。在检查后模块硬件连接无误后,设置模块的IO口,并利用串口助手检测传感器是否响应,当串口返回数字1时则表明传感器可进行数据的传输。
BH1750FVI型光敏传感器内部具有ADC模块可进行模拟量到数字量的转换,对处理后的数据将通过IIC协议传输至STM32单片机 [10] ,其通信模型如图6所示。对光敏传感器的通信部分编写主要包括:打开时钟及定义引脚、配置函数、配置SDA的输出和输入方向、产生信号等。
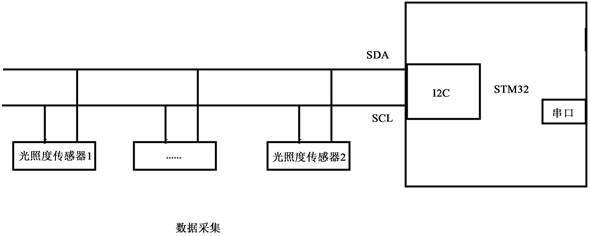
Figure 6. Sensor communication schematic
图6. 传感器通信示意图
5. 系统检测
5.1. 上位机测试
对上位机端口及波特率进行配置,选择COM4端口,波特率为115,200,其显示的数据接收界面如图7所示。在自动补光系统与PC通信完成后,自动补光系统将每间隔一秒钟发送采集到的环境信息,从窗口界面可以清晰地看到光照强度和温度信息。为了实现对补光系统的手动调节测试,在上位机软件界面还添加了PWM占空比调节的按键,通过占空比大小的改变从而实现亮度调节的效果。通过测试,自动补光系统与PC通信稳定,且操作占空比调控按钮后LED灯板亮度发生明显变化,实现了上位机功能。

Figure 7. The host computer software receives the data interface
图7. 上位机软件接收数据界面
5.2. 硬件模块测试
在自动补光系统电路调试完毕后,将系统变压模块的输出端连接至用于测试的LED灯板,系统的光敏传感模块则对着补光板,通过补光板亮度的调节,测试的LED灯板也随之发生亮度变化情况,其测试效果如图8所示。通过使用UT383照度计对LED灯板和补光板进行亮度测量,在多组不同亮度的测试中,两光源亮度差异不大,硬件模块可以通过实时采集的光照强度进行调光。

Figure 8. Light sensitive sensing module test results
图8. 光敏传感模块测试效果
5.3. 亮空背景下的户外测试
为了测试自动补光系统在现实场景的伪装效果,本实验将在户外不同光照条件下进行测试,并记录环境光照强度以及LED灯板的输出照度。首先将LED灯板背对着太阳,而光敏传感模块正对太阳进行环境光数据的采集,然后在不同天气的不同时段进行测试。某阴天的四个不同时段测试时LED灯板发光效果如图9所示,分别在环境光照强度为5500 Lx、7600 Lx、14,800 Lx和20,900 Lx的条件下进行记录,从肉眼可以观察到,LED灯板与天空背景亮度基本一致。
为测试LED灯板发光亮度与环境光照度的差异,实验通过UT383照度计对环境光照强度进行采集,并将照度计放置在距LED灯板5厘米处进行照度测量,部分测试结果如表2所示。测试结果显示LED灯板发出亮度与环境光照度存在一定的差异,但在肉眼观测下,灯板亮度与天空背景亮度不易区分,起到了一定的伪装效果。
Table 2. LED light plate illuminance change table
表2. LED灯板照度变化表
6. 结语
本文介绍了亮空背景下的飞行器自动补光系统的软硬件组成,以及该系统在实际测试中的具体表现。该自动补光系统以STM32为核心,结合光照度传感器、BUCK模块、Zigbee无线通信模块等,较好地实现了与天空背景亮度相适应的效果,达到了伪装的目的。由于无人机成本低、应用广的特点,战场上小型无人机频繁出现,且无人机技术也是未来武器发展的方向,而当今针对小型无人机伪装技术的研究较少,如何针对它们进行有效的伪装成为了一个迫切的需求。当前基于STM32的飞行器自动补光系统可以实现亮空背景下的自适应伪装,满足了部分的伪装需要,具有一定的推广应用价值。未来,针对亮空背景下的飞行器自动补光系统还需在发光器件上进行改进,利用电致变色等不同材料制作的变色器件实现飞行器表面变色的需求,从而在亮度和色度上更好地满足亮空背景下的伪装需求。
NOTES
*第一作者。