1. 引言
微球作为一种主要粒子,是表征分子扭矩 [1] [2] ,流体动力学 [3] [4] ,单分子力谱 [5] ,空气中颗粒物研究 [6] [7] 等的重要标志。它也是显微镜中用于超分辨率成像的有利工具 [8] [9] 。跟踪微球并定量测量其三维运动对于揭示微球实验中涉及的物理或生物学原理至关重要。由于微球的特征尺寸在微米或亚微米级别,因此,光学显微技术是测量移动微球三维位移的主要方法。微球位移的高分辨测量是一项具有挑战性但意义重大的工作。数字全息显微技术(Digital Holographic Microscopy, DHM)具有纳米分辨率 [10] ,而且DHM并不需要扫描方式 [11] 。因此,DHM是一种适用于动态测量微球位移的方法。
实际上,基础测量精度的提高为应用提供了更准确的数据基础。关于测量机理的讨论已经发展到研究者更加关注实际测量过程引起的实际因素与理想测量模型之间的差异的地步,例如倾斜面的重建 [12] 和孪生图像的消除 [13] 。
离轴数字全息显微技术与传统的重聚焦方式测量微球轴向位移不同,是对透射光线进行追迹,从而定位标记的变化,测量轴向位移。离轴全息提供了在微球位于特殊位置(例如微球显微聚焦像附近时)轴向位移测量的解决方法,克服了同轴全息测量微粒的难点问题。微球轴向位移的测量容易受到环境噪声干扰,从机理上提高测量的精准性和信噪比,是解决噪声问题的重要途经。本文重点关注微球光路搭建中,非平行光及离轴光照射微球造成的微球成像中心与光程长最大值点不一致,因而造成实际光程长差分分析结果与理论结果有差别的问题,从而通过建立重构定心法,重新计算全息定位标志,通过提高标志定位的精准度,从而提高轴向位移测量的测量信噪比。
2. 重构定心法测量微球轴向位移
对实际取得的微球全息图进行重构(5 mm直径二氧化硅微球,浸没在水中,放大倍数54.77倍),微球重构相位最大值与微球成像几何中心并不是同一点,微球相位最大值像素坐标(448, 371),微球成像几何中心(453, 367),相差x方向5像素,y方向4像素,如图1所示。入射微球中心的中心光线具备最大的光程长值,因此中心光线与成像面的交点应为微球重构像为最大值所在的像素点。微球重构像几何中心应为微球投影在成像面的圆心。而复合式测量微球位移的方法需要分析光程长最大值与周边像素光程长差值,以此作为轴向位移的移动标志物。
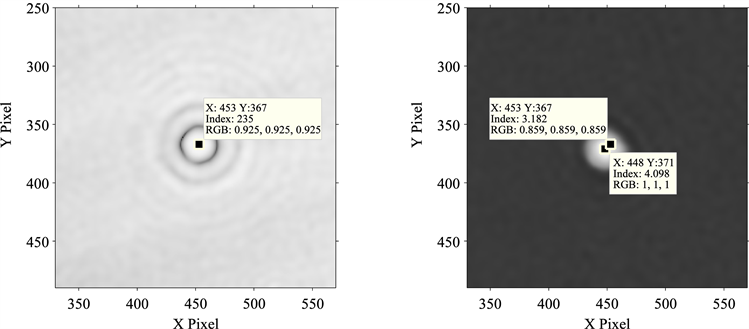
Figure 1. The hologram (the interference fringes are removed) and there constructed phase of microsphere
图1. 微球全息图(已去除干涉条纹)和微球的重构相位
因此传统方法中,中心像素点并不是光程长最大值的点,需重新分析具体情况,评估具体情况与理想情况的偏差,建立新的测量方法,提高测量准确度和信噪比。分析上述现象可知,入射微球的中心光线与成像面不垂直,且入射光束并非平行光束。分析原因:1) 机械安装造成的成像光轴与理想情况存在偏差;2) 前面光路的平行扩束与理想情况存在偏差。
倾斜入射的非平行光束等效于轴外点光源发出的发散光束,具备孔径角和视场。由于轴外物点宽光束经系统成像后存在失对称的情况,即对称与主光线的一对光线经光学系统后,失去对主光线的对称性,交点不再位于主光线上。在光学设计中,这种像差称为彗差。如图2所示。

Figure 2. Schematic diagram of actual incident microsphere rays
图2. 实际入射微球光线示意图
子午面是AB起点构成的面,弧矢面是A'B'起点构成的面。ABA'B'OO'均为边缘光线及主光线与成像面的交点。
以环带像素光程长差值的二阶导数尖峰处作为测量微球轴向位移的定位标志。
光程长:
(1)
其中
(2)
环带像素光程长值为
(3)
由于光程长与相位呈线性关系,光程长最大值点即为重构相位中心,同时为重构强度最大值。追踪重构像中心的强度值,多项式拟合计算微球轴向位移。
3. 系统与实验
3.1. 测量系统与测量模型
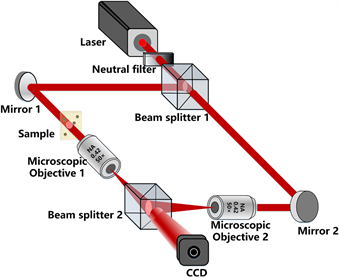
Figure 3. Digital holography microscope experimental system
图3. 数字全息显微实验系统
如上图3所示,Laser为激光器件,其发出的光源波长为692 nm,该光源可被中灰镜NF调整光强大小,后被分光棱镜BS1分成样本光路和参考光路,样本光通过反射镜M1折射后照到被测样本,后被MO1显微物镜放大。参考光被MO2显微物镜放大,参考光路图与样本光路几乎相同。使用分光棱镜BS2将参考光和样本光进行合光,后照射在CCD上,发生干涉后,得到数字全息图(干涉图)。
像面数字全息图强度为
(4)
其中
为零级项,O为频谱滤波时的虚像,O*为频谱滤波时的实像,R为当物光路没有样本时的参考光。参考光的入射角λ从不同的方向进入光路,使得零级项会出现在频谱的中央位置。所以全息图的实像与虚像,分别在频谱中以零级项为中心在频谱中互不交叉。
对于波前重构成像的获取信息。需要用分离出来的后两项
通过圆形窗进行逆傅里叶变换,模拟参考光并引入误差,求得含有被测生物样本相位信息的物光虚像。
再现像面上的光场复振幅的公式为:
(5)
用于校正畸变因子、重构面上的光波
为强度、相位为
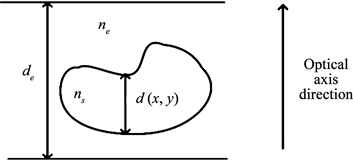
Figure 4. Schematic of transmitted digital holographic microscopy
图4. 透射数字全息显微的原理图
因为相位和光程差呈线性关系(见图4),则
(6)
公式(6)中量样本折射率为ns,样本所处环境折射率为ne。样本厚度
,样品池的厚度de。则利用相位与光程差的关系得被测物体像面相位与厚度的关系为
。
3.2. 相位中心校正法提高相位型样本测量准确度
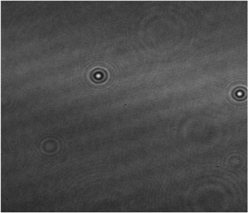
透明微球是典型的相位型样本,在生物学、生物医学领域,微球作为观测生物大分子行为的标志物,其实时位移是研究关注的重点。利用像素差分光程长法能够突破传统全息同轴技术不能在聚焦像面附近测量位移的限制。像素差分光程长法追迹两像素点折射光线,计算两像素点光程差,分析光程差二阶导数变化,随着重构距离的改变,光程长差二阶导数出现尖峰,且尖峰位置随微球的轴向移动发生等距位移。如图5为直径为5 μm的SiO2微球的全息图、重构相位图和重构强度图。
依据相位图可以计算两像素点差分光程长,如图6为微球中心像元和距离中心7个像素的像元的差分光程长位移标志位,即二阶导数值。随着微球的位移,二阶导数尖峰值也发生改变。
 (a)
(a)  (b)
(b)  (c)
(c)
Figure 5. Microspheres (a) hologram, (b) phasediagram, and (c) intensity diagram
图5. 微球(a) 全息图、(b) 相位图和(c) 强度图
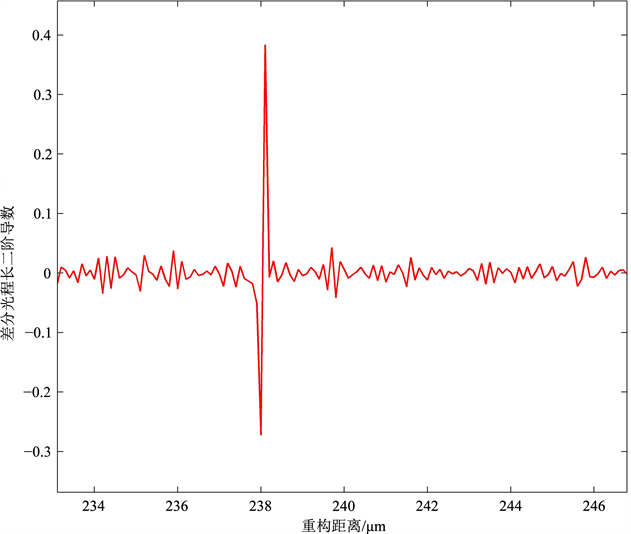
Figure 6. Second derivative of differential optical path length
图6. 差分光程长二阶导数
图6中微球中心为利用霍夫变换求取的微粒全息图的圆心。这样定义微球中心是基于光线能够垂直入射CCD,使CCD中心及光轴在同一直线上。然而在实际光路中,由于搭建光路存在角度误差,光轴不能垂直于CCD平面,因此不能正入射微球。倾斜角度的入射带来的后果是微球相位中心与微球成像面圆心并不是同一点。而差分光程长方法利用中心像元与其他像元做差分所获取的二阶导数值,其数值对比最为显著,以此作为标志位能够使差分光程长计算微球位移的测量获得最优准确度。但基于以上分析,中心像元的定义应保证光程长最大化,即相位中心点应为中心像元。以实验验证以上推论。

Figure 7. Center of microsphere image and reconstructed phase center
图7. 微球像面圆心与重构相位中心
图7为重构的相位图,当重构距离为d = −3.5 mm时,在微球区域内,相位最大值像素点的坐标为(407, 379),该点相对光程长值为−329.81 nm,而霍夫变换计算的像面圆心坐标为(407, 379),对应相对光程长值为−329.81 nm,相对误差达到13.1%。
利用重构相位的中心作为中心像素点,通过校正中心像元的方式提升测量准确度,抑制由环境引起的测量噪声。图8重构相位中心与微粒圆心差分光程长二阶导数值。由图8可知,校正中心像元为重构相位中心后,二阶导数标志位的尖峰相对于校正前更易区分,尖峰值更高,且相对帧数与校正前并不同,两种方法重构轴向位置相距约0.478 nm。
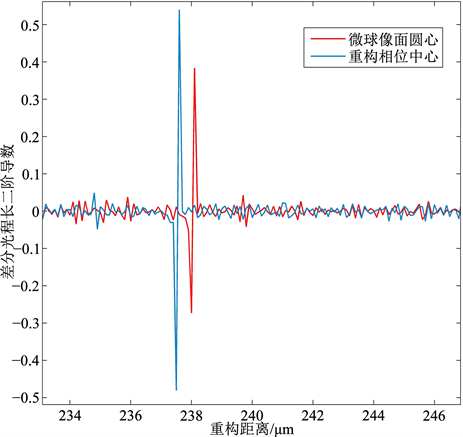
Figure 8. Reconstruction of the second derivative of the difference optical path length between the phase center and the particle center
图8. 重构相位中心与微粒圆心差分光程长二阶导数值
利用校正中心像元的方法,测量微粒位移,位移测量的结果图如图9所示。而以微粒圆心为中心像元的光程长差分方法得到的测量分辨力为5 nm,但校正中心像元后,轴向位移测量分辨力能够达到4 nm,提升20%,测量信噪比相对于校正前亦有提升。

Figure 9. Diagram of axial displacement of the particle after center pixel correction
图9. 中心像元校正后微球轴向位移图
4. 结论
通过对直径为5 mm的SiO2微球进行实验,验证了微粒像面圆心与重构相位中心并不在同一点,这是由光轴与CCD面并非垂直、光路装置安装存在偏差造成的。同时通过计算微粒像面圆心与重构相位中心对应的光程长值,证实重构相位中心的光程长值高于微粒像面圆心的对应值。因此,校正中心像元为重构相位中心,能够提高差分像素光程长的相对差值。经过实验证实,中心像元校正后,微球位移测量分辨力能够提高约20%,信噪比亦有所提升,能够将校正中心像元法用于对浑浊介质中相位型样本的测量,提升传统光程长差分方法的成像质量及测量性能。
基金项目
本文由天津市技术创新引导专项基金(22YDTPJC00980),天津市中央引导地方科技发展资金项目(22ZYCGSN00370),天津市研究生科研创新项目(2021YJSS141),天津农学院研究生教育教学研究与改革项目(2021-YC-54),国家自然科学基金项目(51775381)资助。
NOTES
*通讯作者。