1. 研究概述
自动驾驶的全面实现将为人们带来极大的便利。但由于网络、机器学习技术、政策等方面的限制,人机共驾是全面实现自动驾驶的必经之路。当前发售的商用智能驾驶汽车大多数搭载了L2级的自动化驾驶功能。使用此自动化等级的功能时即处于人机共驾模式,自动化模式监管是人机共驾时驾驶员重要任务之一。合理视觉表征的自动化模式信息有助于驾驶员保持良好的模式感知,因此在L2级自动驾驶情境下,自动化模式信息显示设计至关重要。
当前商用的L2智能驾驶汽车中常搭载多个自动化功能模块,对应多种自动化模式。人机共驾情境下,不同自动化模式中,人和车不同的责任分配要求驾驶员始终了解当前已开启的自动化系统及其限制,即为自动驾驶情境下的模式感知。对于自动化模式错误的感知被称为自动驾驶中的模式混淆(Mode confusion)。在模式混淆的情况下,用户会不清楚当前什么自动化系统处于开启状态;或不清楚什么行为适合什么自动化模式。当一辆车内同时有多个自动化系统可用时,驾驶员易产生模式混淆 [1] 。例如在常用的功能ACC (Adaptive Cruise Control)与LCC (Lane Centering Control)变化时,模式混淆的可能性会进一步增加。因此,自动驾驶车辆应最大程度向驾驶员提供其功能和模式的解释,避免自动化模式混淆 [2] [3] 。
前人的研究中,Lee等人认为,在高度自动化驾驶的系统中,模式混淆是导致事故的重要人为错误因素 [4] ;Banks与Wilson等人的研究中,驾驶员的一些无意识操作(微调方向盘)易导致部分自动化功能意外关闭,从而导致模式混淆的发生 [5] [6] ;Tinga等人认为,智能驾驶汽车在向更高水平的自动化过渡进程中,人因方面的关键问题之一是避免模式混淆,而清晰的人机界面对于增强模式感知尤为重要 [7] 。综上所述,驾驶员自动化模式感知不清易导致事故发生,需要恰当设计的人机界面提升驾驶员的感知能力。就此方面的研究而言,王建民等利用态势感知理论对汽车使用ACC功能时切入场景的人机界面进行了剖析与设计 [8] ;Kurpiers等人提出了自动驾驶中自动化模式感知的主客观测量方法 [1] ;Novakazi等人认为通过了解用户理解其与自动驾驶系统交互的过程,有助于制定自动化模式显示设计方案 [9] 。自动驾驶情境下模式感知相关人机界面研究是一个新兴的研究方向,当前关于验证自动化模式的界面设计方案对于驾驶员模式感知等能力的影响研究较少。本研究旨在综合主客观指标对自动化模式设计方案进行评价。首先,对研究对象(自动化模式功能、载体及设计方案)进行了限定;其次,确立了主客观的评价指标并测试了相关数据;最后,利用层次分析法(AHP, Analytic hierarchy process)确立各项指标权重并对自动化模式设计方案进行综合排序,如图1。

Figure 1. The framework of comprehensive evaluation for automation mode display
图1. 自动化模式显示综合评价框架
2. 研究对象
2.1. 自动化模式功能研究限定
ACC与LCC是当前商用车辆搭载的最常见的两项基本自动化功能。ACC为自适应巡航控制,是一项基于定速巡航(CC, Cruise Control)系统发展起来的辅助驾驶技术。驾驶员在使用这项功能时,汽车能够按照设定的速度自动行进。当识别到前方有车辆时,汽车能够通过控制油门和刹车实现与前车时距的保持。LCC为车道居中控制,在车速适宜、车道线清晰的情况下,可辅助驾驶员保持车辆在车道中间行驶。总的来说,ACC控制车辆纵向移动,LCC控制车辆横向移动。ACC配合LCC使用,能够让车辆沿当前车道一直行驶,而驾驶员在此情境主要担任监管者的角色。基于ACC与LCC的功能实用性与普及范围较广这两个特征,本文将自动化模式方面的研究对象限定在ACC与LCC功能上。
2.2. 自动化模式信息载体研究限定
尽管当前多数的商用智能驾驶汽车都搭载了ACC与LCC功能,但部分汽车在自动化模式方面的人机交互仍然缺乏有效性。汽车中的人机交互以视觉交互为主,而HUD (Head up display,抬头显示)是搭载视觉交互信息的良好载体。故研究将信息显示载体限定于HUD。为了评价自动化模式在HUD中显示形式的有效性,本文设计了四种类型的自动化模式显示HUD。包括文本显示、图标显示、方向显示和AR (Augmented reality,增强现实)显示,表1展示了四种类型的HUD及其不同状态时所代表的自动化模式。

Table 1. Automatic mode HUD display scheme and meaning
表1. 自动化模式HUD显示方案及含义
3. 实验
驾驶员对于自动化模式的正确感知关乎驾驶的安全性。实验旨在探讨HUD中何种显示方案的自动化模式能够最大化唤起驾驶员对自动化模式的正确感知,同时也考察了不同显示方案下驾驶员的态势感知、车辆信息感知能力与横向搜索范围。其中,态势感知能力是指驾驶员基于环境动态、全面地洞察、理解与预判安全风险的能力,可以体现在驾驶员对于驾驶环境的观察与记忆上;车辆信息感知能力表示驾驶员对于车辆基础信息正确把握与否,例如对于速度、导航的感知等。
3.1. 参与者
招募了25名司机,包括16名新手和9名非新手。被试平均年龄为26.29岁,SD为2.75岁。所有参与者均持有有效驾照且至少拥有一次独立驾驶经验。在本实验中,新手和非新手按照驾驶里程数来进行分组,500英里以下驾驶里程被定义为新手司机,其余司机被定义为非新手司机。所有参与者视力正常或矫正正常且均为右利手。
3.2. 刺激材料
本节实验的驾驶场景材料来自Du等人开发的道路危险视频库 [10] ,将自动化模式图标和速度、导航、燃油等基础信息附加到视频上,如图2所示显示了4种自动化模式显示方案的效果图。视频的左下角、右下角、中间偏上位置的图像代表了驾驶时的后视镜。
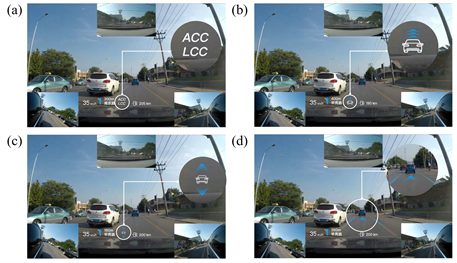
Figure 2. Automation mode display illustration (a) text, (b) icon, (c) direction, (d) AR (Image source: Self-drawn)
图2. 自动化模式显示方案图示(a) 文本显示,(b) 图标显示,(c) 方向显示,(d) AR显示
3.3. 实验设计
实验的自变量为自动化模式HUD显示方案(被试内因素)、驾驶员感知自动化模式变化的时间(以下简称为t) (被试内因素)、驾驶经验(被试间因素)。因变量为被试自动化模式感知能力、态势感知能力、车辆信息感知能力及横向搜索范围。
3.4. 实验设备
实验设备包括一台SMI RED500桌面式眼动仪,用于捕捉被试眼动轨迹,采样率为120 Hz;iView X用于设置采集视图,以及调整被试眼屏距离。E-Prime 2.0软件用于编制实验程序和统计驾驶员回答自动化模式、态势感知及车辆信息等问题的结果。
3.5. 实验流程
实验前,向被试讲解ACC与LCC的意义,同时讲解实验所绘制的每种自动化模式方案所代表的含义。正式实验时,在每一个试次中,首先播放带有自动化模式标志的视频,一段时间后,自动化模式发生变化,1秒或3秒后(自变量t),视频播放结束。视频结束后,自动跳转到关于车辆自动化模式的问卷界面;接着向被试提问关于驾驶场景的问题,以测验被试在使用不同HUD设计方案时的态势感知能力;最后是关于车辆基本信息的问题。实验流程示意图见图3,问卷列表见表2。视频顺序在不同被试间是随机的,防止顺序效应引起的实验误差。
4. 结果分析
将驾驶员自动化模式感知能力、态势感知能力、车辆信息感知能力分别量化为自动化模式问卷(表2,问题1)正确率、驾驶场景选择(表2,问题2)正确率与车辆基础信息选择正确率(表2,问题3)。利用二元Logistic回归分析探讨自动化模式HUD显示方案、驾驶经验、驾驶员感知自动化模式的时间(t)与驾驶员上述三种能力之间的关系。横向搜索广度主要从热区图及眼动数据进行观察。
4.1. 自动化模式感知能力
HUD类型对自动化模式感知能力有显著影响(分析结果通过了Hosmer-Leme show检验,表明观测数据与回归模型拟合状况良好)。被试使用图标、方向和AR显示的自动化模式HUD时,自动化模式感知能力显著强于使用文本显示的自动化模式HUD。而使用图标、方向和AR显示这三类HUD时,自动化模式感知能力无显著差异。t对驾驶员自动化模式感知能力影响显著,驾驶员感知自动化模式时间3秒时回答自动化模式的正确率显著高于感知1秒时。驾驶经验对被试自动化模式感知能力无显著影响。表3描述了驾驶员自动化模式感知能力受HUD类型和t的影响程度。
Table 3. Regression analysis results
表3. 回归分析结果
4.2. 态势感知能力
实验结果表明,使用AR显示的自动化模式HUD时,被试的态势感知能力显著强于使用文本、图标和方向显示的自动化模式HUD。方向显示的HUD唤起的被试态势感知显著弱于文本和图标显示的自动化模式HUD。文本和图标显示的自动化模式HUD唤起的被试态势感知能力无显著差异。非新手的态势感知能力显著强于新手。表3展示了HUD类型与驾驶经验对态势感知能力的影响程度。
4.3. 车辆信息感知能力
被试使用文本显示的自动化模式HUD时,车辆信息感知能力显著弱于图标、方向和AR显示的HUD,后三组车辆信息感知能力无显著差异。可能的原因是,文本信息引起的被试认知负荷较大,导致车辆信息分布的注意力程度较小。非新手的车辆信息感知能力显著强于新手。表3展示了HUD类型与驾驶经验对被试车辆信息感知能力的影响程度。
4.4. 横向搜索广度分析
较广的横向搜索广度是经验丰富的司机的搜索方式 [11] ,而较窄的横向搜索广度意味着驾驶员可能产生了认知隧道。设计不佳的HUD可能会使驾驶员产生认知隧道,因此,利用被试的眼动数据研究被试在不同HUD方案下的横向搜索广度至关重要。从热力图的结果来看,AR显示条件下的被试横向搜索广度最小,如图4所示(半透明的矩形标出了被试的主要搜索范围)。可能原因是AR显示的图像占据了被试的部分视觉通道。从统计学的角度来看,将横向搜索广度量化为被试在两侧区域的注视与眼跳时间之和(dwell time),利用重复测量方差分析研究各HUD方案间横向搜索广度的差异。结果表明,HUD类型对被试横向搜索范围影响显著(F(3,22) = 3.211, p = 0.032, η2 = 0.118)。成对比较的结果显示,AR显示的自动化模式横向搜索广度显著小于文本与方向显示,其余显示形式的自动化模式引发的横向搜索广度两两无显著差异。图5显示了各组的横向搜索广度(已量化为dwell time)。

Figure 4. Subjects heat map (a) text, (b) icon, (c) direction, (d) AR
图4. 被试注视热力图(a) 文本显示,(b) 图标显示,(c) 方向显示,(d) AR显示
5. 主观评价分析
在L2级自动驾驶中,自动化模式显示除了要保证驾驶员对模式感知的正确度,还需要满足驾驶员的主观偏好。由此通过问卷调查的形式来研究用户对HUD中自动化模式显示方案的主观评价。问卷调查主要分为了驾驶员基本信息调查、HUD使用经验、自动驾驶使用经验、不同驾驶环境(低、高交通流量)下HUD主观评分(认知负荷、干扰度、偏好度评分)等。关于HUD主观评分的问题均为5分制量表。
问卷填写次数为52份,其中,6人的问卷数据因填写时间过短或选择行为高度一致被剔除。最终的有效问卷数据为46份。对于不了解ACC、LCC及HUD的驾驶员或仅听说过上述三者的驾驶员,在问卷中建议其先对ACC、LCC和HUD进行阅读了解。
问卷结果显示,就自动化模式HUD各显示方案的认知负荷评分而言,驾驶经验与显示方案交互作用显著(F(3,42) = 14.522, p < 0.001, η2 = 0.248)。新手驾驶员认为,文本与方向显示的自动化模式认知负荷较高,二者引发的认知负荷显著高于图标与AR显示的自动化模式信息。而非新手驾驶员则认为,文本与图标显示的自动化模式信息引发的认知负荷显著高于方向与AR显示。对于各HUD方案的干扰性评分,驾驶环境与自动化信息显示方案交互作用显著(F(3,42) = 3.069, p = 0.035, η2 = 0.065)。低交通流量情境下,驾驶员认为四种自动化模式显示方案干扰程度无显著差异;高交通流量情境下,新手与非新手驾驶员均认为AR显示的自动化模式干扰程度显著高于其余三组自动化模式HUD。偏好度方面,通过事后检验发现,低交通流量情境下,新手与非新手驾驶员均对AR显示的自动化模式偏好度最高。除开AR显示外,新手偏好度最高的为图标显示的自动化模式,而非新手更偏好方向显示。高交通流量条件下,新手偏好图标显示,非新手更偏好方向显示。两种驾驶环境下,文本显示均为最不受偏好的自动化模式显示形式。
6. 自动化模式显示方案多维度综合优选评分
本节旨在综合前述主客观数据对四种自动化模式显示方案进行综合优选排序。由于驾驶中的人机界面优选过程需考虑各指标在现实自动驾驶过程中的重要性(例如,安全性重要性大于偏好度),需要根据专家的建议进行排序决策,故采用AHP对HUD的显示方案进行排序。但完全依赖于专家评分又过于主观。为了平衡专家评分的主观性,将AHP的评分规则作出一定改进。在对自动化模式评价指标权重的确立上,主要依据专家打分;而在方案层对于准则层评分时,将前述自动化模式感知能力、主观偏好等主客观数据考虑其中。
首先,构建自动化模式显示方案的评价层次结构模型,评价指标主要源于前文已进行测量的指标,如表4所示。
Table 4. Hierarchical model of evaluation index for automation mode display
表4. 自动化模式显示评价指标层次结构模型
其次,邀请了5名具有丰富驾驶经验的认知学领域专家,对自动化模式HUD对应子准则层的指标进行对比评分,通过判断各指标的相对重要性,构建判断矩阵。通过SPSS AU [12] 对每位专家的判断矩阵进行初步分析,结果均通过一致性检验(CR < 0.1)。将每位专家对各指标的对比评分进行平均,得到汇总的判断矩阵,汇总的判断矩阵满足一致性检验的要求。根据汇总判断矩阵,将数据导入SPSS AU得出各项指标权重,如表5所示。
Table 5. Weight of evaluation indicators for automation mode display
表5. 自动化模式显示各评价指标权重
根据前期实验与问卷调查得出的不同HUD方案的各项指标数据,对两种驾驶条件与两种用户条件下的HUD不同种方案构建对子准则层判断矩阵,利用SPSS AU对判断矩阵进行分析,得出方案层对于子准则层权重(所有矩阵均通过一致性检验),以新手低交通流量条件为例,如表6所示。
Table 6. Results of weights of scheme level for sub-criteria level judgment matrix
表6. 方案层对于子准则层判断矩阵权重分析结果
将子准则层对于目标层的权重向量记为W,方案层对于子准则层的权重向量记为
,则方案层对于目标层的组合权向量为
。以新手低交通流量条件为例,计算过程如下:
由计算结果可知,文本显示的自动化模式HUD对目标的综合权重为0.1758,图标显示的自动化模式HUD对目标的综合权重为0.2160,以此类推。综上,新手驾驶员在低交通流量条件下自动化模式信息显示的推荐优先度顺序为AR显示、方向显示、图标显示、文本显示。同理,以所有方案的综合权重为指向对两类驾驶环境与两类驾驶员条件下的各方案优先度进行推荐程度排序,最终结果如表7所示。
Table 7. Ranking of automation mode HUD for two types of driving environments and two types of driver
表7. 两类驾驶环境两类驾驶员自动化模式HUD方案优选排序
7. 结语
本文以L2级自动驾驶中ACC、LCC两种自动化模式为例,利用了主客观多维度数据,研究了以HUD为载体的不同自动化模式设计方案对于驾驶员自动化模式感知能力、驾驶安全性及主观满意度的影响,最后利用AHP对四种自动化模式方案作出了综合排序。结果表明,AR显示在促进驾驶员感知自动化模式与提升态势感知能力方面表现较佳,但与此同时会减小驾驶员横向搜索范围;驾驶员使用图标显示的自动化模式HUD时,态势感知能力稍弱于AR显示条件下,但自动模式与车辆信息感知能力与AR显示相当;文本显示在主客观多项指标中表现较差。从AHP综合分析的结果来看,图标和AR显示的方案综合性能最好,其中,AR显示更适用于新手驾驶员,图标显示更适合非新手。在实际应用中,应考虑此两种自动化模式HUD设计方案。本文的研究为自动驾驶中人机界面的设计方案评价提供了一定的参考。
基金项目
贵州省科技计划项目(黔科合基础-ZK[2021]重点055号);贵州大学培育项目(贵大培育[2019]06号)。
注释
文中所有图片均为作者自绘。
NOTES
*通讯作者。