1. 引言
随着现代科技的快速发展航空摄影技术的不断飞跃进步,倾斜摄影测量对于现代测绘行业有着巨大的帮助,解决了一些山区城市地形复杂,测绘环境艰苦,植被茂密测绘难度大的问题,增加了测绘的精度和速度,减轻了测量的工作量,提高了工作效率。正如四川省攀枝花市,就是所谓的山区城市,常年高温少雨天气干燥,地形复杂,植被茂密,昼夜温差较大,平均海拔高,由于这些缘故给测绘工作带来了巨大的困难。如果运用传统测量不仅人员需求量大,作业进行困难,工作进展缓慢,测量精度受到人为、温度、湿度、环境等诸多因素的影响较大,所以在攀枝花市开展传统测量项目是一件非常困难的事情。但是近些年来随着航空倾斜摄影测量技术的广泛运用,对于测量山区城市降低了作业难度,加快了作业进行的速度。但是航空倾斜摄影测量也存在一定的短板,一些植被太过于茂密的部分地方无法拍摄到也需借助传统测量进行补测,所以利用航空倾斜摄影为主传统测量为辅进行测量,这样不仅降低了人为失误造成的误差影响而且减少了人员需求量,对于类似攀枝花市一样的山区城市利用这种方法测量地形是比较合适的,运用无人机倾斜摄影测量与传统测量技术相结合进行精度分析具有一定的研究价值。
2. 测量原理
2.1. 倾斜摄影测量
倾斜摄影测量 [1] [2] 是以空间位置之间的相互关系为基础,根据摄影测量原理,在坐标系统中从不同角度对地面物体进行拍摄。在摄影测量中,被称作图形原点的图像点与世界坐标原点之间的相互关系,能够实现地理位置的定位与量算、地形绘制等测量工作,运用搭载了传感器的无人机对需测目标进行高重叠率,多方位的航向飞行拍照,使用RTK所测实地控制点坐标相结合,对所拍的影像运用软件进行初始化处理、点云和纹理处理、空中三角测量加密、影像匹配,DSM、正射影像和指数的生成等流程。最后得到质量报告、数字地表模型(DSM)和数字正射影像图(DOM)等成果,由质量报告可知模型精度是否达标。无人机倾斜摄影测量具有成本低、方便高效、影像分辨率较高等特点大大促进了倾斜摄影测量技术的发展。
2.2. RTK测量技术
RTK是实时动态测量技术,是以载波相位观测为根据的实时差分GPS技术,它是测量技术发展里程中的一个突破口,它的组成是由数据链部分、接收机部分流动站部分组成,在基准站上安装一台接收机为参考站,对卫星进行连续观测,并将其观测数据和测站信息,通过传输设备实时传输个流动站,流动站在接收到卫星信号时,然后根据相对定位原理进行实时解算,得到流动站的三维坐标及精度,即可进行实地测量。
2.3. 数据平差原理
光束法空中三角测量 [3] 是以一个摄影光束(即一张像片)作为平差计算基本单元,是理论较为严格的控制点加密方法,它以共线条件方程为理论基础,这一方法的基本做法是在像片上量测出各控制点和加密点的像点坐标后,进行区域网的概算,以确定区域中各像片的外方位元素及加密点坐标的近似值。然后根据共线条件按控制点和加密点分别列误差方程式,进行区域平差计算,求解出像片的外方位元素和加密点的地面坐标。
光束法空中三角测量的平差计算与单模型的光束法整体求解基本上相同。由光线条件方程,可对每个像点列出两个关系式:
(1)
(2)
当像片内方位元素(f, x0, y0)为已知时,上式方程经过线性化后的误差方程可写为:
(3)
使用矩阵符号表示对某一像点的误差,使用泰勒级数将其展开后,并将其线性化后方程为:
(4)
上式中:
(5)
(6)
(7)
(8)
(9)
(10)
式(5) (6)中A、B表示误差方程系数矩阵,式(7)、式(8) X、t表示未知数矩阵,式(9) L表示常数矩阵,式(4) V表示观测值改正数。
平差方法主要计算流程包括以下几步:
1) 影像外方位元素和地面点的坐标近似值确定。
2) 逐步设立误差方程和改化法方程。
3) 运用边法化边消元循环分块解求改化法方程式。
4) 求解出外方位元素。
5) 运用空间前方交会求解出待定点的地面坐标,对于影像的公共连接点取平均值作为最后结果,也可消去影像的外方位元素未知数,建立未知数的改化法方程,直接求解出点的未知数。
3. 项目概况
3.1. 设备
1) 无人机
大疆精灵4RTK [4] 是一款小型多旋翼高精度航测无人机,面向低空摄影测量应用,具备厘米级导航定位系统和高性能的成像系统,便携易用,全面提升航测效率,它集成了全新的RTK模板,不仅拥有更强大的抗磁干扰能力和精度定位能力,明显提升了图像元数据的绝对精度,在作业完成后,用户可直接通过DJI云PPK解算出高精度的位置信息。定位系统支持连接D-RTK2高精度GNSS移动站,并且可以通过4G无线网卡或者WiFi热点与NTRIP相连接。还提供了航点飞行、航带飞行、摄影测量2D、摄影测量3D、井字飞行、五向飞行等众多的航线规划飞行方式。
2) 南方全站仪
它是一种精密仪器,非常广泛的运用与施工建筑行业,具有丰富的测量程序,同时具有数据存储功能、参数设置功能。
3) RTK
华测i70是华测导航旗下RTK产品中的智能RTK测量系统,i70是一款高度集成OLED显示屏、收发一体电台、4G全网通、双电池全能RTK接收机。精度及配置见表1所示:
4) Pix4Dmapper
Pix4Dmapper [5] [6] 软件是由瑞士pix4D公司研发,它是一款集全自动、快快速、专业精度为一体的无人机数据和航空影像数据处理软件。它提供了定量化的自动空三、区域网平差和地面控制点的精度。能够自动生成数字地表模型(DSM)、正射影像图(DOM)、具有纹理的点云数据和3D模型,点云文件的导出格式有LAS、LAZ、PLY、XYZ等格式,而三维网格纹理的导出格式有PLY、FBX、DXF、OBJ等格式,相对于其它图像处理软件它具有更强的处理能力。
5) 南方cass 10.1
南方cass 10.1是一款非常专业的CAD图形设计软件,它是在CAD上进行了二次开发的,必须和CAD配合才能使用,功能非常强大,界面非常简洁明了、操作方便快捷。对于绘制地形图而言非常实用。
3.2. 采集概况
本实验测区为某高校校区,测区面积为0.294 km2,测区地理位置位于四川省攀枝花市,地势起伏较大,气候干热少雨,植被茂密,共采集229张影像,测区内共布设采集6个控制点,航向重叠度为70%,旁向重叠度为50%,飞行高度为110 m,飞行航线设置为井字飞行。
4. 作业流程
4.1. 外业操作流程
首先在待测区域内均匀布设控制点,使用RTK测量出控制点的坐标数据,然后使用大疆精灵4 RTK设置飞行航线,设置为井字飞行(飞行航线如图1所示),航向重叠度设置为70,旁向重叠度设置为50,返航高度设置为115 m (由于限高120 m),飞行高度设置为110 m,电量20%时自动返航,待无人机飞行作业完成时,所拍摄影像通过数据线将无人机连接电脑的方式导出,RTK手薄通过蓝牙传送到手机再传送到电脑,运用Pix4Dmapper软件进行内业处理,将影像导入到软件中进行影像拼接与计算。待软件将影像处理完成自动生成数字地面模型、正射影像图、三角纹理的3D模型和质量报告,输出以输出以OBG格式和FBX格式输出,再运用cass 10.1软件上裸眼三维与正射影像二维联动,测得随机地物的三维坐标,与之可进行精度分析,如图2所示流程图。
4.2. 内业数据处理流程
本实验利用Pix4Dmapper软件对所摄影像进行拼接处理,首先在软件上新建项目设置保存位置,再将影像数据导入软件中进行预处理,基准面坐标系设置为china2000,坐标系选择CGCS2000 CM102E,进入处理选项模板选择3Dmaps,导入所采集控制点,利用控制点对影像进行刺点,即可开始对影像处理,待Pix4Dmapper软件自动对影像进行解算生成数字地表模型(DSM)、数字正射影像图(DOM)、三维纹理3D模型和质量报告。见表2质量报告精度分析表可知精度达到GJB 2347-1995《无人机通用规范》要求,建模流程图如图3所示:

Table 2. Quality report accuracy analysis table
表2. 质量报告精度分析表

Figure 3. Pix4Dmapper modeling flowchart
图3. Pix4Dmapper建模流程图
1) 影像预处理
将模糊不清的影像挑选出来剔除,整理完成后,将POS数据文件和影像一起导入Pix4Dmapper软件中,使其具有一定顺序,便于以后刺点工作。
2) 影像匹配
刺点时一定要准确刺到相同的位置,确保以后建模工作顺利进行,通过软件解算生成质量报告和3D模型,影像拼接是Pix4Dmapper软件自动进行的,分区块渲染模型,解算时间受硬件设备影响各不相同,总共耗时约6小时。生成模型如图4所示:
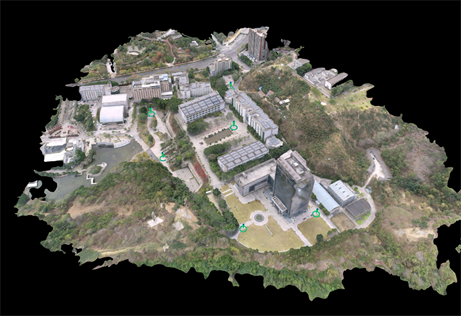
Figure 4. Diagram of the generated 3D model
图4. 生成的3D模型图
5. 数据对比
运用Pix4Dmapper软件生成的(DSM)数字地表模型,导入cass10.1中,利用cass10.1提取坐标的功能提取模型中的多个随机坐标与南方全站仪实地测量的坐标进行数据对比分析,如图5可知目前无人机倾斜摄影测量精度已经达到了厘米级,相较于全站仪差距也相对缩小,说明目前无人机倾斜摄影测量技术以相对成熟,可以针对一些山区城市或满足精度要求的项目进行测量。
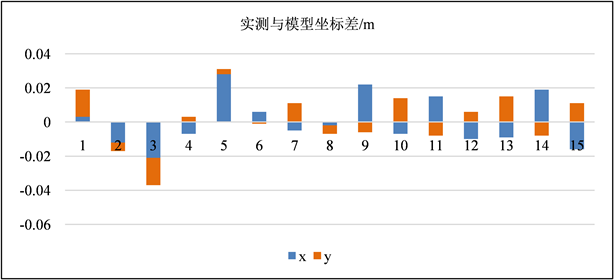
Figure 5. Comparison of digital surface model coordinates and measured coordinates
图5. 数字地表模型坐标与实测坐标对比
6. 结语
本实验主要研究了对于山区城市中无人机倾斜摄影测量采集影像,运用软件建模提取出模型的坐标与实测坐标作对比的过程,由于山区城市地形复杂多样,工程项目中运用这种方法测量绘制地形图是一种非常不错的选择。既缩短了测量周期,又降低了人工成本,清晰地将大部分地方的地形地物都展示在面前,仅少部分需人工补测完善地形图,应用于类似于攀枝花市地形复杂的山区城市,不仅为外业采集减少了工作量,也为内业处理降低了难度。所得到的测量精度达到GJB 2347-1995《无人机通用规范》要求,得出了无人机倾斜摄影测量精度已达到厘米级,无人机倾斜摄影测量技术相对成熟,但在未来的研究工作中,还需进一步加强对于无人机倾斜摄影测量在有茂密植被下物体的测量方法的研究,目前这种测量方法运用较为广泛。
参考文献