1. 引言
作为一项近年来发展起来的测绘新技术,倾斜摄影测量技术是通过飞行平台搭载多镜头传感器,从倾斜与垂直角度对地面拍摄获取地面影像并构建实景三维模型 [1] 。基于倾斜摄影测量技术构建的实景三维模型具有真实化、精细化、高精度等特点,目前,国内外科研与应用公司已经开展基于倾斜摄影测量技术的实景三维模型自动构建的研究,并取得了不错的成果 [2] 。目前基于无人机倾斜摄影测量技术的相关成果数据已经在各行业中得到广泛应用,如电力选线、房产测绘、基础地形测绘、规划设计与征地拆迁等。将无人机倾斜摄影测量技术用于构建实景三维模型,不仅能够提高工作效率,同时精度能够满足相应规范的要求 [3] 。
作为倾斜摄影测量中极为重要的一项工作,像控点布设的方式与数量将直接决定后期的空三加密与构建的实景三维模型精度,同时合理有效的像控点布设方案对于节省人力成本、提高作业效率具有积极的作用。目前,无人机倾斜摄影测量技术在实景三维模型构建中像控点的布设方案没有统一明确的规定,因此针对三维模型项目中的像控点布设方案的研究与设计具有重要意义。本文以某地的实景三维模型项目为实验区,设计了9种像控点布设方案并基于不同方案构建实景三维模型,对野外实测点位坐标、测边长度真实值与模型中同名点坐标、同名边长度进行对比,分析模型精度与像控点布设方案之间的关系。
2. 研究数据
2.1. 研究区域
研究区域位于某地主城区,区域面积约为0.4 km2,测区内地势较为平坦,建筑物较密集。
2.2. 倾斜摄影测量系统及数据获取
测区影像数据获取使用的飞行平台为富地FD-130B多旋翼无人机,搭载相机为FD-5120倾斜相机,机身内置4块蓄电池,能够满足超过半小时的作业时长,最大载荷为5 kg。在进行影像数据采集时,POS数据的水平与垂直定为精度均优于±0.10 m。测区内像控点采集方式为RTK,共采集33个像控点,坐标系为地方独立坐标系,其中平面与高程精度均优于±0.01 m。
2.3. 航摄参数
根据航空摄影测量相关规范以及测区面积,影像数据采集相对航高为75 m,旁向重叠度、航向重叠度均为80% [4] ,南北向飞行3个架次,采集影像数据共1528张。
3. 像控点布设方案及建模
像控点作为影像空三加密与实景模型精度的关键因素,其位置的选择以及平面、高程的测量精度尤为重要。像控点布设通常有三种方案,一是非全野外布点方案,二是全野外布点方案,三是特殊情况布点方案。
3.1. 像控点的选点
为了尽可能提高空三加密及实景模型成果精度,像控点应选择在影像中清晰明显的像点,实际地形可能产生变化、地势不平坦以及水系区域均不能用于像控点布设,原因在于上述区域布设像控点会增加空三内业刺点误差。由于实验区多为农田,地形起伏较低,地势平坦,因此难以确定固定点作为像控点。因此,在乡村道路明显区域通过刷油漆的方式绘制像控点标志,为“L”型。
3.2. 像控点布设方案
根据航空摄影测量相关规范,像控点应均匀布设在测区内,不能在近似直线或者近似平面内布设像控点 [5] ,本文根据测区实际地形,没有过多考虑地形因素,根据均匀分布原则进行像控点布设方案设计,共设计9种像控点布设方案,如图1所示。9种像控点中像控点分布由稀疏到密集,不管是南北方向、东西方向也逐渐增加。
1) 五点法。在测区四周以及测区中心位置各取一个点,根据布设位置选取5个像控点进行空三加密解算。
2) 七点法。在五点法的基础上增加两个像控点布设位置,如图1(b)所示,有两种加点方案,一种是沿航线方向加点,另一种是垂直航线方向加点。
3) 九点法。在五点法的基础上增加四个像控点布设位置,如图1(c)所示,在沿航线方向加点与垂直航线方向各加两个点。
4) 十三点法。在九点法的基础上增加四个像控点布设位置,如图1(d)所示,有两种加点方案,一种是沿航线方向加点,另一种是垂直航线方向加点。
5) 十五点法。在九点法的基础上增加六个像控点布设位置,如图1(e)所示,有两种加点方案,一种是沿航线方向加点,另一种是垂直航线方向加点。
6) 二十五点法。在九点法的基础上增加十六个像控点布设位置,如图1(f)所示,沿航线方向与垂直航线方向各加八个点。
3.3. 实景三维建模
利用ContextCapture软件进行实景三维模型构建,为了保证构建模型的质量,需要首先将质量较差的影像数据剔除,其次通过同名点匹配、密集点云生成、不规则三角网构建以及纹理映射等得到真实实景三维模型,如图2所示。通过图2可以看到,生成的测区实景模型较为清新,没有所谓的“蜡融”等现象,能够满足后续数据处理的要求。
 (a)
(a) 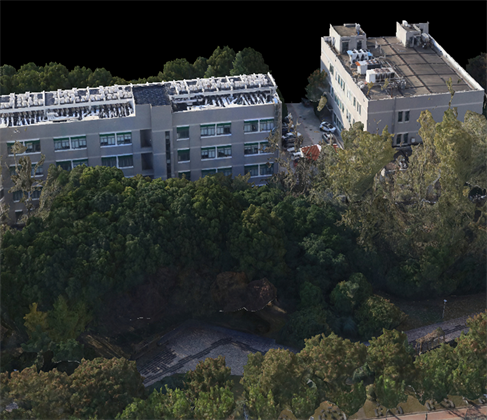 (b)
(b)
Figure 2. Realistic 3D model effect of the survey area
图2. 测区实景三维模型效果
4. 实景模型精度分析
根据9种不同的像控点布设方案进行空三加密解算与实景模型构建,对于实景模型使用相同的检查点、检查线进行精度检查。
4.1. 点位精度分析
在测区设置8个检查点并采用与像控点测量一致的观测方式获取检查点坐标,其中4个检查点位于测区左侧区域,另外4个检查点位于测区右侧区域。通过8个检查点对不同像控点布设方案构建的实景三维模型进行点位精度检验。将检查点坐标作为真值,取实景模型中检查点同名点坐标为测量值,分别计算真值与测量值的平面中误差与高程中误差,结果如表1所示,同时绘制不同像控点布设方案下实景三维模型的平面中误差与高程中误差曲线图,结果如图3所示。

Table 1. Construction of realistic model plane and mean square error/m for different image control point layout schemes
表1. 不同像控点布设方案构建实景模型平面与中误差/m

Figure 3. Construction of realistic model plane and elevation mean square error curve with different image control point layout schemes
图3. 不同像控点布设方案构建实景模型平面、高程中误差曲线
通过表1可知,不同像控点布设方案下构建实景三维模型的平面中误差最大值为0.0477 m,平面中误差最小值为0.0203 m,可知所有像控点布设方案构建实景三维模型平面精度均能够满足要求。不同像控点布设方案下构建实景三维模型的高程中误差最大值为0.0465 m,高程中误差最小值为0.0193 m,参考文献 [5] 中规定:1:500比例尺模型高程中误差小于0.5 m,因此可知所有像控点布设方案构建实景三维模型高程精度均能够满足要求。通过对比不同像控点布设方案构建实景三维模型精度,主要得出的结论有:
1) 方案二与方案三、方案五与方案六、方案七与方案八的像控点布设个数都一致,只是不同方向上的像控点个数不一样,其中平行于航线方向像控点数量多的方案构建实景模型平面精度与高程精度均更高,因此可知像控点数量一定时,模型精度与像控点布设方向有一定关系;
2) 方案二、方案三与方案一相比增加了两个像控点,其中方案二较方案一构建实景模型的平面精度提高了0.0096 m,高程精度提高了0.0168 m;方案三较方案一构建实景模型的平面精度提高了0.0081 m,高程精度提高了0.0163 m。因此可知像控点数量增加后实景模型的高程精度改善效果要好于平面精度改善效果。
3) 随着像控点布设数量的增加,实景模型的平面精度与高程精度都逐渐升高并趋于稳定,因此可知实景模型的精度与像控点数量与布设方案有关,但是像控点数量达到一定时,实景模型平面精度与高程精度提升不再明显。
4.2. 测线精度分析
对实景三维模型中的道路以及建筑物等几何结构进行评价对于权属界线、土地利用现状等测量工作尤为重要,通过边长精度可以实现几何结构的评价,如果要进一步使用实景模型,必须具有较高的测线精度。本文通过在实景模型中测量4条具有代表性的长边值与实地测量长边值进行对比得到测线精度,测线精度表示为:
(1)
式(1)中,L表示模型测量值;m表示边长真实值;d表示测线精度。
9种像控点布设方案生成实景模型边长量测值与真实值的对比如表2所示,相对精度如表3所示。
通过表2及计算可知,方案一至方案九构建模型的边长平均相对精度分别为0.1481%、0.1187%、0.1162%、0.0987%、0.0561%、0.0597%、0.0311%、0.0261%、0.0141%。边长的相对精度均控制在0.15%以内,边长精度较点位精度更易达到。
Table 2. Comparison of true edge length values and real scene model edge length measurements/m
表2. 边长真实值与实景模型边长量测值对比/m
Table 3. Relative error of side length/%
表3. 边长相对误差/%
5. 结束语
本文通过实验,针对实景三维区域设计了9种不同的像控点布设方案,通过对比不同像控点布设方案下构建的实景三维模型的点位精度与测线精度,得出的结论有:
1) 针对实验区中,使用9种像控点布设方案构建的实景三维模型精度均能够满足三维模型建模精度要求;
2) 随着像控点数量的增加,实景三维模型的点位精度与测线精度也在不断提高,像控点个数从5个增加到25个时,点位平面中误差从0.0477 m降到了0.0203 m,高程中误差从0.0465 m降到了0.0193 m,可以看出像控点数量的增加,在空三计算中多余观测量的随之增加,模型的精度提高。但是当像控点数量增加到一定时,点位精度与测线精度的提高不再明显;
3) 通过对比像控点个数一致时,布设方向不同方案构建的实景三维模型点位精度可知,平行于航线方向的像控点布设方案模型精度优于垂直于航线方向的像控点布设方案模型精度,因此在实际像控点布设时可优先考虑平行于航线方向的像控点布设方案;
4) 目前,基于实景三维模型的矢量数据采集与编辑已经相对成熟,下一步将重点对基于实景三维模型制作的地籍图精度进行研究与分析,推动实景三维模型的进一步应用,为后续项目生产者提供借鉴与参考。