1. 引言
建筑物竣工测量是建筑物建成与投入使用前的重要一环,它是根据竣工验收特点与要求进行实测与比对的一项工程,竣工验收的完成也标志着整体工程的完工。竣工测量的内容与成果包括 [1] [2] :1) 建筑物立面图;2) 竣工现场与周边地形;3) 建筑物基底面积;4) 绿地面积;5) 相关部门规定的其他内容。建筑物竣工测量成果数据精度要求高,包括建构筑物位置与大小等信息,数据采集量大,给传统全站仪实测带来了巨大的挑战 [3] 。
随着科学技术的快速发展,测绘行业也在面临转型发展,测绘软硬件设备不断更新迭代,目前,多种测绘新技术已经在测绘多领域中发挥了重要作用,其中三维激光扫描技术作用尤为明显 [4] 。三维激光扫描技术是继GPS技术后的又一次测绘技术革命,该技术能够在短时间内采集海量点云数据,是对传统点测量的一种延伸 [5] 。三维激光扫描技术凭借高效率、高精度等优势已经在地质灾害、地形测量、文物保护、变形监测中发挥巨大作用 [6] [7] [8] 。其中罗德安将三维激光扫描技术应用于变形监测中,通过实验结果验证了可行性 [9] 。赵群等将三维激光扫描技术应用于国家体育馆钢架监测与变形分析中 [10] 。然而,传统的架站式三维激光扫描仪存在的问题主要表现在测站位置难以选择、观测数据效率低以及点云数据拼接困难等。以一台观测效率为1,000,000 pts/s的三维激光扫描仪为例,该类扫描仪每站观测时间不少于10 mins,并在地形困难区域需要多次架站选择合适位置进行激光点云数据采集 [11] ,又增加了内业数据拼接的难度。
因此,本文根据新型RTC360三维激光扫描仪的优势,将该三维激光扫描仪应用于建筑物竣工测量中并进行实验 [12] [13] ,利用该新型三维激光扫描仪进行测区建筑物立面以及地形等要素三维点云数据获取,利用三维点云数据进行测区建筑物立面图与竣工地形图绘制。使用常规的测量手段对基于RTC360三维激光扫描仪的测区竣工测量成果精度进行检验,同时对比不同作业手段的作业效率,验证RTC360三维激光扫描仪在竣工测量中的可行性与优越性。
2. 作业介绍
2.1. 总体技术路线
同传统三维激光扫描仪的作业流程类似,RTC360三维激光扫描仪用于房屋竣工测量同样包括外业作业与内业数据处理,其中主要工作在于内业数据处理,大大降低了外业工作量,能够有效提升工作效率,本文将RTC360三维激光扫描技术应用于房屋竣工测量中的技术如图1所示。
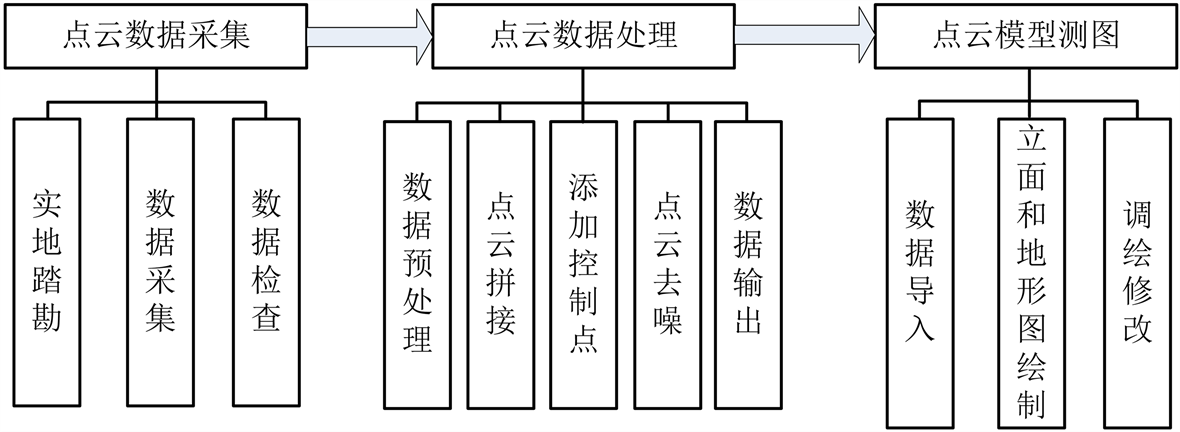
Figure 1. Technical process of RTC360 applied to house completion survey
图1. RTC360应用于房屋竣工测量的技术流程
2.2. 外业数据采集
外业数据采集包括线路规划、实地数据采集以及采集数据检查,在进行实地数据采集前,通过实地踏勘了解现场情况以便提前规划好架站位置;实际作业时,按照预先规划路线及架站位置进行数据采集,其中仪器参数可根据项目设计需求设置。作业时,无需进行对中、整平等操作,根据现场情况以及项目设计需求选择点云密度级别。完成当前测站数据采集后,根据平板电脑对采集数据进行初步检查,完成当前线路所有数据采集后,统一对采集数据作进一步检查。
2.3. 内业点数据处理
扫描点云内业数据处理方面,选用的是系统自带内业数据处理软件Cyclone,整个数据处理过程包括四个部分,分别为点云拼接、控制点导入、点云去噪以及数据输出。首先将存在重合点云测站的点云数据配准至统一坐标系中,得到测区内所有点云数据,从而实现点云拼接。点云拼接完成后,利用外业采集控制点,基于同名点匹配将三维激光点云数据统一转换至具有绝对坐标的坐标系中。最后,为避免噪声点对数据影响,利用整体去噪于局部去噪两个过程实现点云的去噪处理并将满足生产条件的点云数据输出为LAS、E57等多种点云数据格式。
2.4. 点云测图
检查点云空间几何精度,满足精度检查后方可进行点云测图,点云测图软件选用清华三维EPS三维测图系统,该点云测图平台能够支持海量点云数据的瞬间加载,通过点、线、面绘制功能完成点云场景中多类地物提取,将地物属性存储于对应属性表中,通过数字线画图实现地物要素的空间位置以及属性信息的表达。
2.5. 外业精度检查
通过内业地物提取软件实现竣工图绘制后,对于因部分区域因存在点云缺漏导致无法获取位置与属性信息的情况,利用统外业测绘与调绘手段对此类区域进行补测与属性添加,完成测区所有图面整饰后,选取一定比例的图幅范围内成果数据进行精度检核 [14] 。
3. 项目实施与成果展示
3.1. 试验区介绍
为验证RTC360三维激光扫描仪的实际应用效果,选择某区块房屋竣工测量项目进行试验,该测区实际面积约为0.04 km2,该测区由于是新建房屋区域,因此无高大植被与树木遮挡,主要为房屋与道路,通视条件较好,能够满足三维激光扫描的作业要求。
3.2. 试验区数据采集
为能够全方位采集测区数据,同时没有过多冗余数据,选择合适的位置进行架站,通常为分岔路口与房屋间等间隙较大区域,共在试验区架设62站。以圆形标靶的形式在试验区均匀设置10个控制点,每个控制点分不同时段观测两次,每次观测的平面误差小于2 cm,高程误差小于3 cm。
3.3. 试验区数据处理
在徕卡点云数据处理软件Cyclone中新建工程项目,将外业采集点云数据导入新建工程中,根据点云视图的方式进行拼接,拼接过程中很少进行人为干预 [15] 。完成整体点云拼接后,在点云模型中导入标靶控制点,根据标靶控制点的坐标信息进行点云的整体绝对定向,最终生成满足后续生产条件的点云数据,如图2所示。
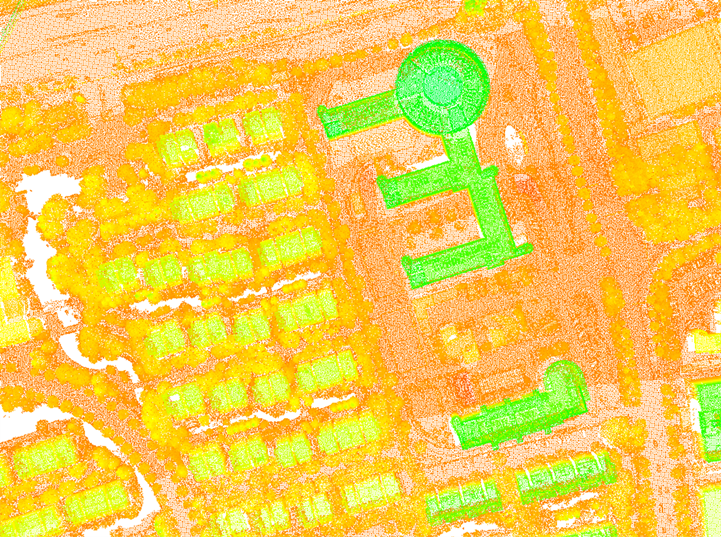
Figure 2. Point cloud result data in the test area
图2. 试验区点云成果数据
3.4. 内业成果展示
1) 立面图绘制。以清华三维EPS三维测图软件为平台进行竣工图绘制,在软件中新建项目,将满足生产要求的点云数据导入制图软件中,参考高清照片辅助点云模糊或密度稀疏区域的竣工图绘制。首先进行建筑物立面图绘制,完成立面图绘制后卸载点云数据,图3所示为试验区内根据点云数据绘制的某栋建筑物立面图成果。

Figure 3. Drawing results of point cloud elevation section and elevation of a building
图3. 某建筑物点云立面切面与立面图绘制成果
2) 竣工地形图绘制。竣工地形图绘制时,为避免建筑物、电杆等立体地物顶部点云对矢量提取产生影响,确定点云场景中的裁剪高程并进行点云切片裁剪。裁剪完成后,在俯视状态下进行地形绘制。完成地形绘制后,将点云卸载,图4所示试为验区内根据点云数据绘制的竣工地形图成果。

Figure 4. Finished topographic map results in the test area
图4. 试验区内竣工地形图成果
3.5. 成果精度检验
使用TS02型全站仪在试验区内采集部分具有明显特征的地物特征点作为检验点,对本文基于RTC360三维激光扫描仪制作竣工图的几何精度进行检验,同时使用钢卷尺测量部分门窗长度,竣工地形图成果的平面中误差与高程中误差计算方式为 [16] :
(1)
式(1)中,D为真误差;n为观测值个数。
3.5.1. 立面图精度检验
在试验区内选取部分房屋,分别测量房屋的窗户长度、墙体长度以及门高等进行立面精度检验,对比绘制立面图中窗户长度、墙体长度以及门高等与实际测量值,统计得到立面图相对误差如表1、图5所示。

Table 1. Statistics of relative accuracy of elevation view/m
表1. 立面图相对精度统计/m

Figure 5. Distribution of relative error
图5. 相对误差分布图
根据上述图表可知,使用RTC360三维激光扫描仪进行房屋竣工的成果误差分布在−0.02 m至0.02 m之间,最后计算得到成果中误差为0.011 m,满足《城市测量规范》 [17] 中的集合精度要求。
3.5.2. 竣工地形图精度检验
为验证本文方法进行房屋竣工测量成果平面高程精度,在测区内均匀观测部分平面与高程检查点,对于检查点与成果中同名点得到几何精度统计,其中平面统计结果如表2、图6所示。
Table 2. Statistics of plane accuracy of as-built topographic map
表2. 竣工地形图平面精度统计
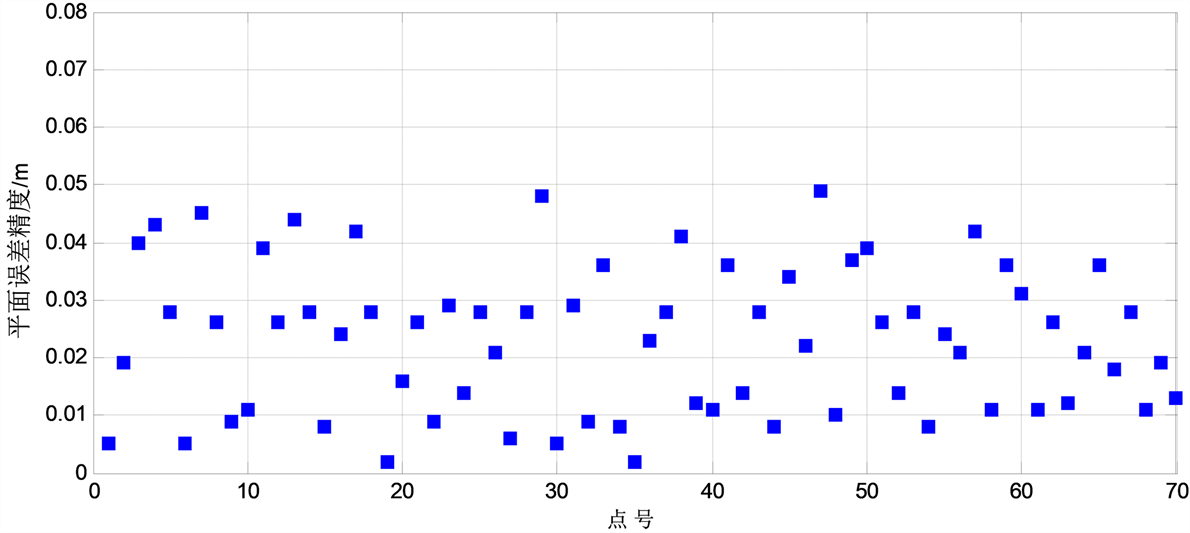
Figure 6. Plane accuracy distribution of as-built topographic map
图6. 竣工地形图平面精度分布图
通过上述图表可知,平面误差均小于0.05 m,计算得到中误差为0.026 m,满足城市测量规范》对竣工地形图平面精度的要求。
竣工地形图的高程精度统计结果如表3、图7所示。
通过表3、图7可知,最小高程误差与最大高程误差分别为−0.003 m、−0.018 m,误差分布在−0.02 m至0.02 m之间,根据式(1)计算得到中误差为0.013 m,成果精度满足《城市测量规范》中对竣工地形图高程精度的要求。
Table 3. Elevation accuracy statistics of as-built topographic map/m
表3. 竣工地形图高程精度统计/m
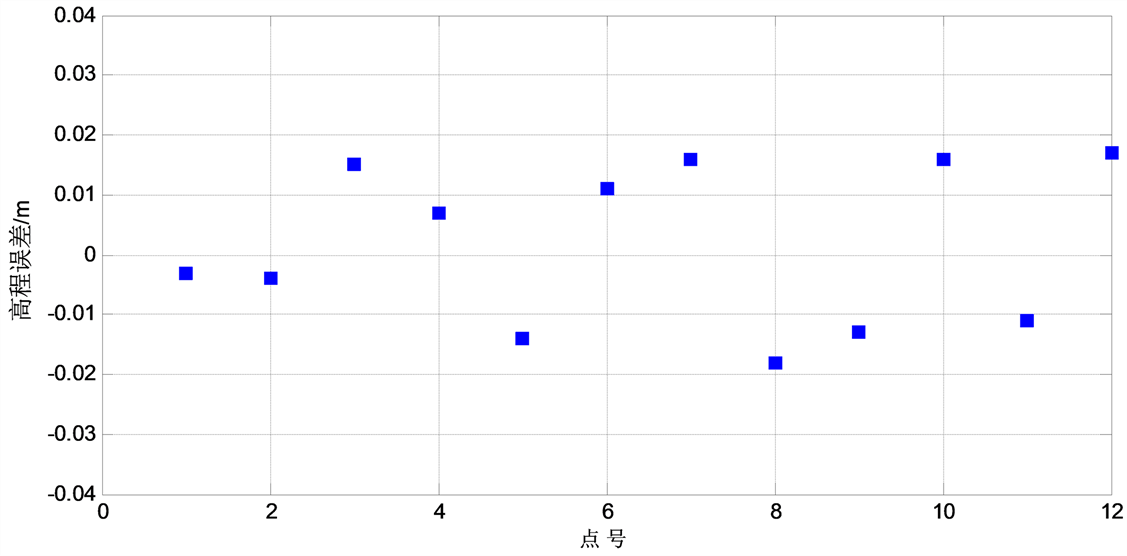
Figure 7. Elevation accuracy distribution of as-built topographic map
图7. 竣工地形图高程精度分布
3.6. 效率对比
分别使用全站仪以及常规三维激光扫描仪进行试验区竣工测量,对比不同作业手段的作业时间,统计结果如表4所示。
Table 4. Comparison of completion measurement efficiency of different operation methods/day
表4. 不同作业手段的竣工测量效率对比/天
4. 结束语
随着基础设施建设的不断开展,三维激光扫描仪凭借其在数据采集与处理中的优势不断地应用于竣工测量中。RTC360三维激光扫描仪能够在短时间内采集海量点云数据于高清影像数据,其中单站扫描时间最快能够达到26 s,采集数据细节丰富、全面,能够有效节省外业时间,节省项目成本,同时在面对复杂作业环境具有较高的适应性。通过对RTC360三维激光扫描仪在建筑物竣工测量中的精度进行检验,结果表明该新型三维激光扫描仪作业精度能够满足工程竣工要求。建筑物顶部没有完整点云,为获取建筑物顶部完整信息,还需要后期无人机等设备补充。综上所述,RTC360三维激光扫描仪的测绘领域应用主要表现在小面积竣工测绘、中低楼层的立面测绘以及复杂场景的三维建模等,为智慧城市建设提供高清、高精的三维信息成果。