1. 引言
永磁同步直线电机(PMLSM)因其结构简单、效率高而在工业上得到了广泛的应用。由于永磁同步电机直接驱动系统消除了中间传动机构,外部负载扰动将直接作用于电机而没有缓冲 [1] ,对系统的抗干扰能力和鲁棒性要求较高。为此,各种控制策略被提出并应用于PMLSM伺服控制系统,如自适应神经网络控制(ANNC)、模型预测控制(MPC)、鲁棒控制(RC)和自抗扰控制(ADRC)。ANNC具有鲁棒性强、不需要精确的数学模型等优点,但其复杂的结构难以在实际工业生产中应用 [2] 。MPC具有动力学速度快、设计概念直观等优点,但其计算过程较为复杂 [3] 。RC以不需要精确的过程模型而闻名,但由于它通常不在最佳状态下工作,因此稳态精度很低 [4] 。ADRC因其不依赖于目标模型的精度,通过实时分析和估计系统的状态变量,对系统的干扰和噪声进行有效抑制,从而能够有效提高系统的跟踪精度和鲁棒性 [5] 。
为进一步提高系统的鲁棒性,文献 [6] 提出一种新型非线性ADRC (NLADRC),NLADRC采用传统线性函数与非线性函数级联构造。级联后的NLESO有效地减小了稳态误差和动态误差。文献 [7] 采用了一种基于降阶扩展状态观测器的ADRC,抑制系统受到的干扰。通过对ESO进行线性化,采用极点配置方法构建降低调节参数数量和相位滞后影响的降阶ESO,实验证明,该方法在多种工况下均能提高控制精度和抗干扰能力,但是线性ADRC的控制效果受到带宽的限制。文献 [8] 设计了一种滑模自抗扰控制(ADR-SMC)策略。基于内部扰动的上界设计了一种快速响应的SMC,然后设计一种线性LESO,在不需要精确数学模型的情况下实时估计系统内部扰动。实验结果表明ADR-SMC具有更好的跟踪精度和抗扰动性。文献 [9] 提出一种改进变结构自抗扰控制器,通过在变结构ESO中引入位置与速度的观测误差,采用基于指数趋近律设计NLSEF,进而实现观测器的无差估计使系统快速到达滑模面后平滑过渡,进一步提高系统的跟踪性能。实验结果验证改进变结构自抗扰控制器具有更强的鲁棒性和更好的控制精度。文献 [10] 提出一种基于高增益非线性的自抗扰控制方法(HNLADRC)。通过分析ADRC技术的线性和非线性误差衰减函数的局限性,设计了高增益非线性误差衰减函数,构建出高增益扩展状态观测器(HNLESO)和高增益非线性误差反馈律(HNLEFL)。实验结果表明该方法可以获得更快的响应能力,然而一定程度上牺牲了系统的稳定性。
综上所述,为提高控制器跟踪精度,抑制峰值误差现象,本文提出了一种变增益自抗扰控制器的PMLSM位置伺服系统。首先引入sigmoid函数和终端吸引子函数替换最优控制函数,构建了改进微分跟踪器(ITD)。其次,设计了变增益误差校正函数,利用变增益误差校正函数替换传统自抗扰控制的非线性函数,构造出变增益ADRC位置控制器,通过Matlab/Simulink搭建PMLSM变增益ADRC位置控制模型,仿真分析验证变增益自抗扰控制器的跟踪精度和稳定性。最后为进一步验证新方法的可行性,基于Speedgoat半实物实验平台对算法进行实验验证。
2. PMLSM数学模型
假设:不计电机的涡流损耗与磁滞损耗、忽略直线电机交直轴间的互感效应、设定直轴和交轴的电感值相同,则在d-q坐标系下PMLSM数学模型可以表示为:
(1)
式中,
,
为dq轴电压,
,
为dq轴电流,L为dq轴电感,R为定子电阻,v为动子移动速度,
为磁间距,
为磁链,M为动子质量,B为粘滞摩擦系数,
为系统的内外总扰动。
3. 变增益自抗扰控制器设计

Figure 1. Control block diagram of ADRC
图1. ADRC控制框图
自抗扰控制器(ADRC)通常由跟踪微分器(TD)、扩张状态观测器(ESO)和状态误差反馈控制律(NLSEF)三部分组成 [11] ,图1为标准一阶自抗扰控制系统框图。其中,TD环节通过系统输入产生多路信号,其中一路用于跟踪给定系统输入信号,而其他多路生成微分信号,以安排信号过渡过程;ESO是ADRC控制器的核心,其基本思想是将系统内部和外部的各种扰动归纳为系统的总扰动 [12] ,通过采集被控对象和控制器的输出信息,计算出被控对象的非线性微分状态变量以及内外总扰动的估计值,并反馈至回路中进行相应的计算补偿 [13] 。NLSEF环节基于TD的过程过渡信息和ESO估计出的被控对象状态信号进行非线性计算,产生一个误差量作为控制信号,反馈给被控对象,从而增强系统鲁棒性 [14] 。
然而标准的ADRC中微分跟踪器存在相位延迟和滤除噪声能力较差,且扩张状态观测器存在初始峰值误差的问题,导致当输出测量值受噪声干扰时,控制器无法准确观测PMLSM的状态变量和受到的外部扰动。
3.1. 改进微分跟踪器的设计
3.1.1. 加速度函数的选取
本文基于神经网络中广泛使用的sigmoid激励函数的特性,提出了一种简单易调参的改进跟踪微分器(ITD)。ITD利用正切sigmoid函数和幅度因子λ设计加速度函数,幅度调节因子λ用于调节加速度函数近似线性区间的宽度,则函数表达式如下式所示:
(2)

Figure 2. The change process of acceleration function
图2. 加速度函数变化过程
幅度调节因子取不同值时,tansig函数变化曲线如图2所示。可以看出:当x趋近于0时,函数表现出较好的线性特性,且x的值越小,函数近似线性区间的宽度越大。当x的值较大时,该函数在范围内呈现饱和特性。因此该函数具有全局光滑的特性。通过使用tansig函数作为跟踪微分器的基本函数,可以加速全局收敛速度,使跟踪输出更加平滑,抑制高频颤振。
3.1.2. ITD的设计
同时,本文借鉴滑模控制理论中降低抖振的方法,将终端吸引子函数引入跟踪微分器结构中,进一步抑制了高频信号引起的颤振。本文提出的ITD的具体表达式为:
(3)
式中,
为位置给定信号,
为位置跟踪信号,
为微分信号。式(3)采用终端吸引函数
,
,其参数值与终端滑模控制类似,终端滑模可以减弱颤振。因此,使用终端吸引函数可以减弱颤振,提高跟踪微分器的对噪声的抑制能力。K,
,
,β为待调参数。
为验证改进微分跟踪器的滤波性能,设输入信号为
,
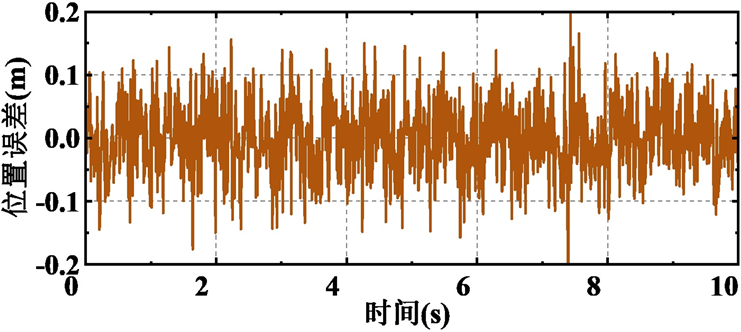
为白噪声信号,均值为0,方差为0.01,采样步长取0.001 s。图3(a)是输入信号曲线,图3(b)是两种微分跟踪器得到的跟踪信号曲线,图4是两种方法的跟踪误差曲线。
 (a)
(a) 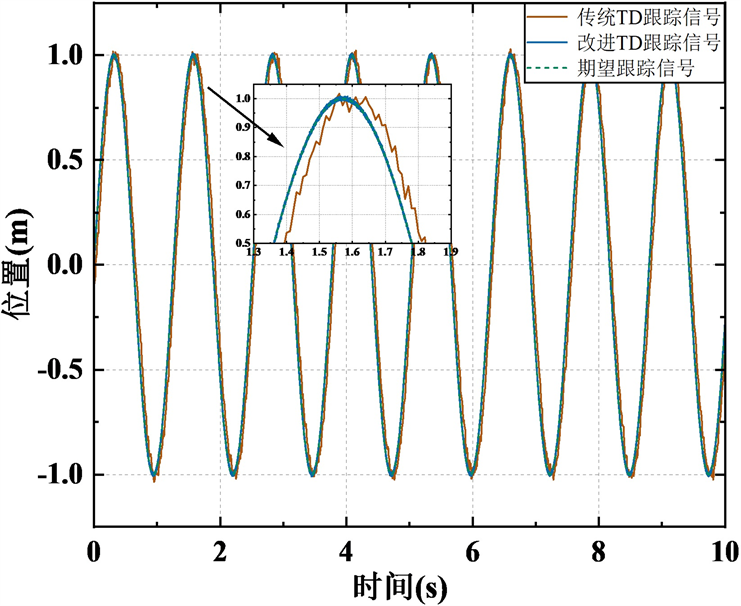 (b)
(b)
Figure 3. (a) Input curve with disturbance; (b) Improved differential tracker tracking curve
图3. (a) 加入扰动的输入曲线;(b) 改进微分跟踪器跟踪曲线
 (a)
(a)  (b)
(b)
Figure 4. (a) Traditional TD tracking error; (b) Improved TD tracking error
图4. (a) 传统TD跟踪误差;(b) 改进TD跟踪误差
由图3可以看出,改进微分跟踪器由于引入了终端吸引子函数,能够有效地滤波输入信号中的噪声,输出的跟踪信号光滑没有噪声干扰。从图4可以看出,ITD的跟踪误差在
之间,而传统TD跟踪误差为
,可知ITD可以更快速、准确地跟踪输入信号。
3.2. 变增益扩展状态观测器
3.2.1. 变增益ESO的设计
在其不连续点,会基于切换条件转换为不同的计算公式,而不连续点的不可导性会导致动态增益出现巨大的变动,导致观测出来的估计值产生峰值误差。为解决此问题,本文设计一种误差校正函数,其表达式为:
(4)
式中,λ为误差增益。由反正切函数特性可知,该函数具有连续可导性,即无需根据e的大小,切换不同的计算公式。为达到“小误差大增益,大误差小增益”的校正效果,系数选取
。
为了抑制初始峰值,设计三阶变增益ESO的表达式如式(5):
(5)
式中,
为变增益函数,定义为:
(6)
变增益ESO的结构框图如图5所示:

Figure 5. Block diagram of variable gain ESO structure
图5. 变增益ESO结构框图
3.2.2. 变增益ESO的稳定性证明
为便于公式计算,令:
(7)
则式(5)可以改写为:
(8)
根据式(1),令
表示位置s,
表示扰动总和F,
表示q轴电流,
表示扰动综合的导数,则PMLSM位置环的状态方程为:
(9)
令
,
,
,根据式(8)和式(9)可得:
(10)
令
,
,可得:
(11)
当忽略扰动F时,则式(11)的特征方程如下:
(12)
根据赫尔维茨茨稳定性判据,ESO系统稳定的充分必要条件是
和
。
又由式(7),
(13)
则由
,推导出
时,
和
大于0,变增益ESO是稳定的。
若系统存在扰动,则会产生稳态误差。当系统达到稳定状态之后,可得:
(14)
所以,ESO的稳态误差可以表示为:
(15)
因此只要
比
大很多,ESO的估计误差就会很小,以满足精度要求,其中
为ESO的带宽。
、
的取值根据整定公式:
、
。为了保证观测器性能,观测器带宽的大小一般为电机谐振频率的1.0~1.4倍,本文选取
。
 (a)
(a)  (b)
(b)
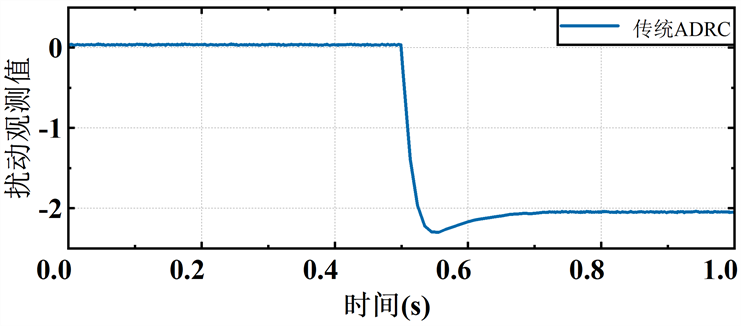
Figure 6. Comparison of the observed values of two ESO; (a) Traditional ESOs; (b) variable gain ESO
图6. 两种ESO扰动观测值的结果对比;(a) 传统ESO;(b) 变增益ESO
为了验证变增益ESO的观测性能,分别搭建传统ESO和变增益ESO仿真模型,给定位置0.6 m,0.5 s时突加负载,扰动观测结果如图6所示。可以得出:两种ESO均能准确辨识系统的内外部扰动,但变增益ESO能够快速且无超调地准确观测负载扰动,使得系统能够及时对扰动进行反馈补偿,从而提升系统鲁棒性。
3.3. 非线性误差控制律
上一节设计了变增益ESO对外部扰动、参数变化等不确定性因素进行了观测估计,速度误差经过NLSEF环节对系统进行反馈补偿。为进一步提高控制系统的鲁棒性,利用变增益误差校正函数替换传统NLSEF中的滑模控制律,则变增益NLSEF控制律数学模型如式(16)所示:
(16)
式中,
和
是两个待调参数。则变增益NLSEF的结构框图如图7所示:

Figure 7. Block diagram of variable gain NLSEF
图7. 变增益NLSEF结构框图
4. 系统仿真与实验分析
本节利用Matlab/Simulink搭建如图8所示的基于变增益自抗扰控制器的PMLSM位置控制系统的仿真模型,验证所提出控制策略有效性。仿真中使用的PMLSM主要参数如下:定子电阻
,电感
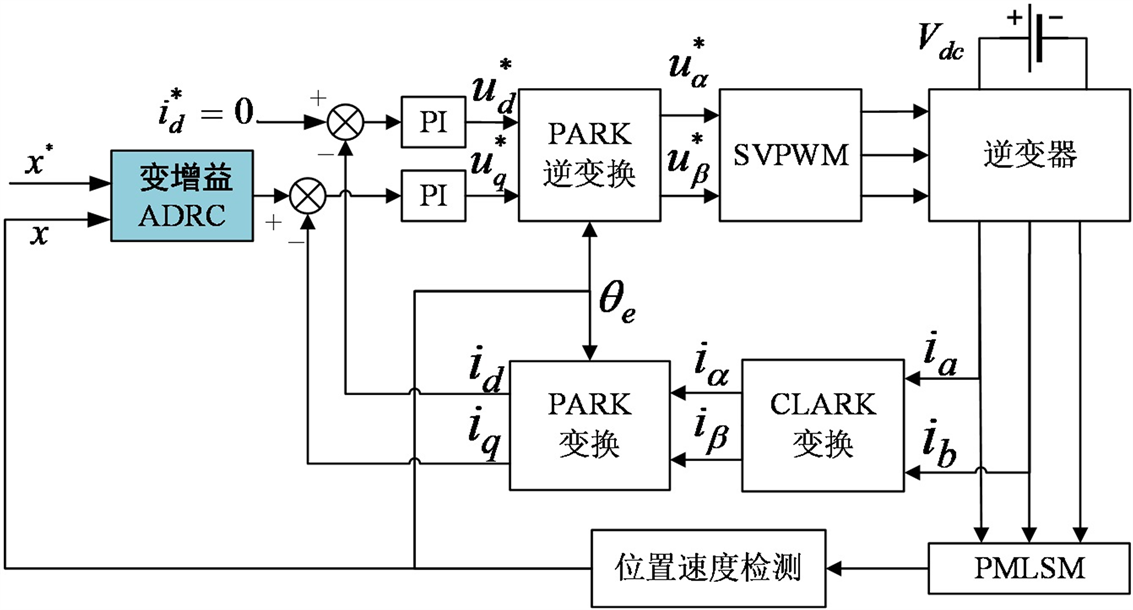
Figure 8. PMLSM position control model of variable gain active disturbance rejection controller
图8. 变增益自抗扰控制器的PMLSM位置控制模型
,推力系数
,极距
,动子质量
,粘性摩擦系数
。本节共进行了三组仿真来验证传统ADRC和变增益ADRC控制器的性能,分别为空载变位置响应、突加负载位置响应以及输入正弦信号并突加负载位置响应的仿真对比。
4.1. 无负载变位置响应的仿真对比
PMLSM空载启动,初始给定位置为0.6 m,1 s后给定位置突变为1 m,则电机在传统ADRC控制和变增益ADRC控制下的位置响应曲线如图9(a)所示。可以看出,变增益ADRC完全消除了超调,此外,变增益ADRC控制下的调节时间要短于传统ADRC控制。在电机启动时,变增益ADRC下的调节时间为0.06 s,而传统ADRC的调节时间为0.16 s,比变增益ADRC控制器慢了160%。在给定位置信号突变
 (a)
(a) 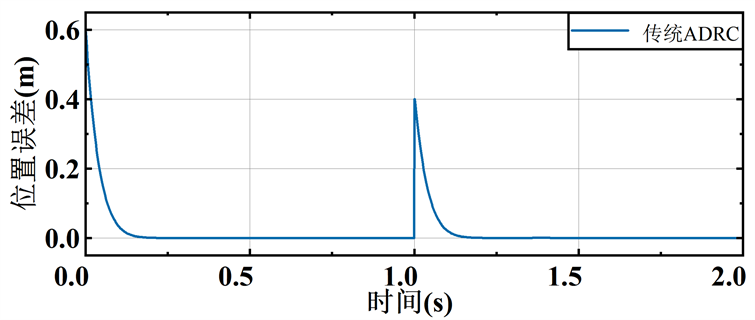 (b)
(b)  (c)
(c)
Figure 9. (a) No-loadposition step response curve; (b) Traditional ADRC position error; (c) Variable gain ADRC position error
图9. (a) 空载变位置阶跃响应曲线;(b) 传统ADRC位置误差;(c) 变增益ADRC位置误差
时,变增益ADRC控制器的调节时间为0.02 s,而传统ADRC下的调节时间为0.14 s,比变增益ADRC慢了600%。图9(a)和(b)的位置误差曲线也可以看出,变增益ADRC位置控制器可以更快地使系统到达稳定状态,显著提高系统的动态性能和跟踪精度。
4.2. 突加负载下的仿真对比
 (a)
(a) 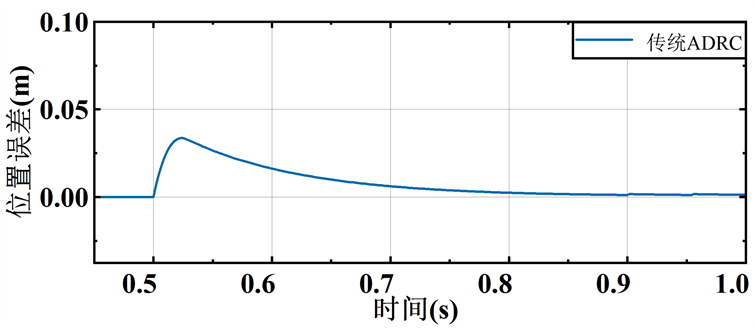 (b)
(b)  (c)
(c)
Figure 10. (a) Response curve with sudden loading; (b) Traditional ADRC position error; (c) Variable gain ADRC position error
图10. (a) 突加负载位置响应曲线;(b) 传统ADRC位置误差;(c) 变增益ADRC位置误差
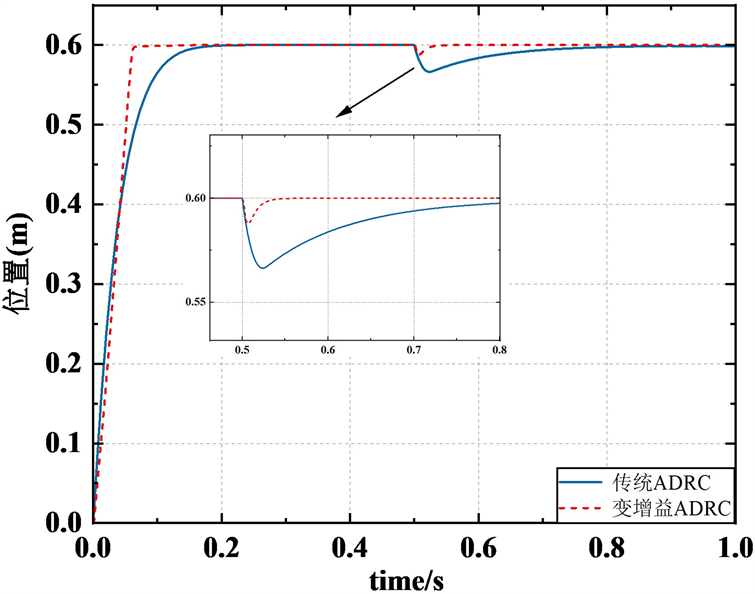
初始时刻给定0.6 m的阶跃位置信号,并在t = 0.5 s时突加F = 50 N的外力扰动,则基于两种控制方法的位置响应曲线如图10(a)所示,位置误差曲线分别如图10(b)和图10(c)所示。从图10(a)可知突加负载时,变增益ADRC位置控制的恢复速度较快,在0.54 s时就重新回到稳态值;而传统ADRC控制方法的恢复速度较慢,在0.68 s时才重新回到稳态值。且变增益ADRC控制器受到负载扰动时,其最大位置误差为0.013 m,而传统ADRC最大位置误差为0.04 m。因此新方法能够有效减小负载扰动对系统的影响,提高系统的抗干扰能力。
4.3. 正弦信号输入并突加负载的仿真对比
给定波形如图11所示的幅值为±1 m、周期为1 s的正弦位置输入信号,并在t = 1 s时突加的外力扰动,则基于两种控制方法的跟踪曲线如图11所示。对比可以看出,基于传统ADRC位置控制器的稳态误差±0.12 m之间;相比之下,基于变增益ADRC位置控制方法的稳态误差有所减小,在±0.01 m之间
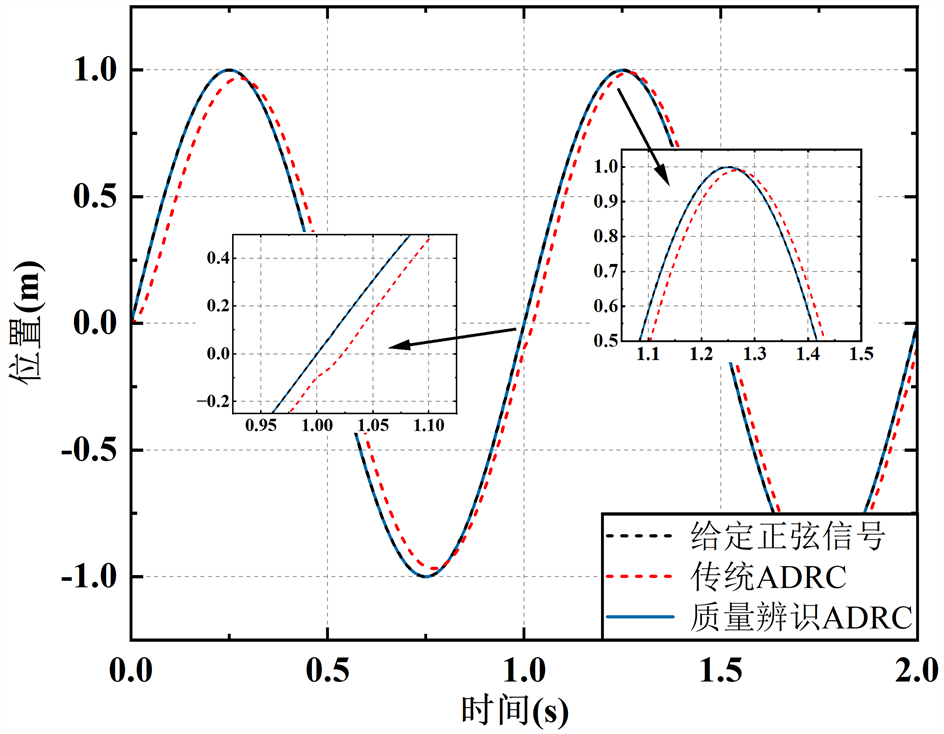
Figure 11. Response tracking curve of sine wave with sudden loading
图11. 输入正弦信号并突加负载位置响应曲线
波动,且受到扰动后也表现出了较强的抗扰动能力,由以上仿真结果可知:基于变增益ADRC控制方法能够实现更高精度的位置跟踪,并且在受到外力扰动后,表现出更强的抗干扰能力。
5. 实验验证
为验证所提出控制策略的有效性,本文基于Speedgoat半实物实验平台搭建了PMLSM伺服系统。分

Figure 12. Hardware structure of the semi-physical experimental platform based on Speedgoat
图12. 基于Speedgoat的半实物实验平台硬件结构图
别基于传统ADRC、变增益ADRC控制方法,搭建了PMLSM位置控制模型,对PMLSM在突加负载扰动工况下的位置和电流响应结果进行对比分析。实验平台组成结构如图8所示,由PMLSM、计算机、Speedgoat实时控制系统、两电平开源驱动器、位置编码器以及信号转接板组成,电机的主要参数如表1所示。
对PMLSM进行突加负载测试,电机在空载条件下以给定位置0.4 m启动,4 s时给电机突加5N的负载,两种控制策略下的位置响应曲线如图13所示。可以看出,初始阶段变增益ADRC控制器的波形更平稳,且在0.76 s时就到达给定位置0.6 m,比传统ADRC快了0.65 s。4 s突加负载时,变增益ADRC的位置回落值和调节时间也最小,最大位置误差仅为0.0017 m,比传统ADRC小了0.0455 m。变增益ADRC的调节时间为0.08 s,比传统ADRC快了0.16 s。由此可以看出:基于变增益ADRC的PMLSM位置伺服系统具有更好的位置跟踪精度,且在受到扰动时表现出更强的鲁棒性。

Figure 13. Response curve of sudden loading position
图13. 突加负载位置响应曲线
 (a)
(a)  (b)
(b)
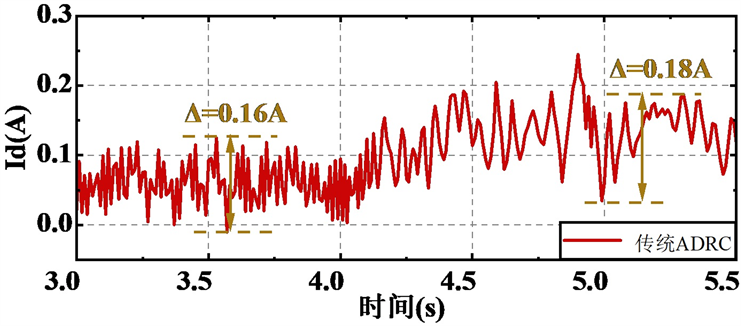
Figure 14. Current response curve of D-axis under sudden loading; (a) Traditional ADRC; (b) Variable gain ADRC
图14. 突加负载下的d轴电流响应曲线;(a) 传统ADRC;(b) 变增益ADRC
 (a)
(a) 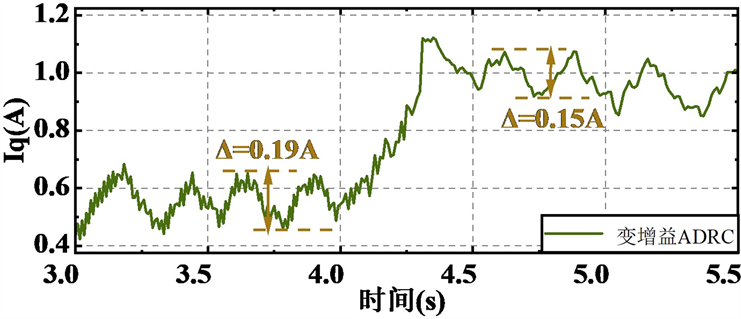 (b)
(b)
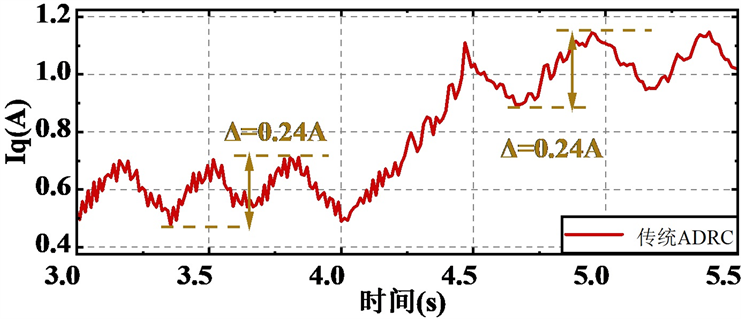
Figure 15. Current response curve of q-axis under sudden loading; (a) Traditional ADRC; (b) Variable gain ADRC
图15. 突加负载下的q轴电流响应曲线;(a) 传统ADRC;(b) 变增益ADRC
图14和图15所示为系统在突加负载时,采用两种不同控制策略下dq轴电流的实验结果。通过对比分析可以发现,电机运动的过程中,由于电机内部噪声扰动等的影响,d轴电流会产生小范围的波动,因此负载突变前不是保持在0A不变的。系统突加负载后,d轴电流会产生波动。然而,采用变增益ADRC控制策略,能够降低d轴电流波动幅度。此外,变增益ADRC策略下,q轴电流响应速度最快,其调节时间仅为0.53 s,比传统ADRC响应时间减少了0.12 s。值得注意的是,当电机到达给定位置并稳定运行时,在变增益ADRC策略下,q轴电流波动最小,仅为0.15 A。相比传统ADRC策略波动减小了0.09 A,表明变增益ADRC控制策略更有利于PMLSM的平稳运行。
6. 结论
针对永磁同步直线电机传统ADRC位置伺服系统存在相位延迟和初始峰值误差的问题,本文提出了变增益ADRC位置控制策略。仿真和实验结果表明,相较于传统ADRC控制器,变增益ADRC控制策略有效提升了系统的响应速度和跟踪精度,并增强了系统的抗干扰能力。
基金项目
国家自然科学基金项目(51677172);浙江省自然科学基金项目(LY19E070006);浙江省科技厅重点研发计划项目(2021C01071)。