摘要: 基于2021版C-NCAP (China-New Car Assessment Program),对某款新能源SUV进行正面100%重叠刚性壁障碰撞试验(50FRB),通过50FRB试验提取驾驶员假人的伤害曲线结果显示假人小腿伤害超标。针对这一问题采用Hyperworks和Primer软件搭建该车型约束系统有限元模型,用Ls-Dyna非显性动力学求解器进行运算求解,并将仿真结果与试验结果进行对标。以对标合格的有限元模型为基础,根据分析结果选取优化参数,对安全带限力值,安全带点火时间,假人与座椅发泡之间的摩擦系数,假人与地毯摩擦系数这4个参数采用正交试验设计的方法进行优化,探寻出最优的设计方案。根据优化方案可知,优化后驾驶员假人小腿指数TI (Tibia Index)下降了29.63%,小腿压缩力(Tibia FZ)下降了31.75%。
Abstract:
According to the requirements of the 2021 version of C-NCAP, a 50FRB test of New Energy car was carried out. The injury curve of the driver’s dummy was extracted through the 50FRB test, and the results showed that the Tibia injury of the dummy exceeded the standard. To solve this problem, Hyperworks and Primer software were used to build the finite element model of the vehicle con-straint system. Ls-Dyna is used to display the nonlinear dynamics solver, and the finite element re-sults are benchmarked with the experimental results. Based on the qualified finite element model and the analysis results, selecting optimization parameters of the vehicle constraint system. The four parameters of seat belt limit, seat belt ignition time, friction coefficient between dummy and seat foam, and friction coefficient between dummy and carpet were optimized by orthogonal ex-perimental design to explore the optimal design scheme. According to the optimized results, the optimized tibia index of driver dummy decreased by 29.63%, the tibia FZ decreased by 31.75%.
1. 引言
随着化石能源的消耗量日益增加,为了保护国家的能源安全,我国开始大力推广新能源汽车。以电动汽车为主要代表的新能源汽车逐步替代传统燃油汽车,新能源汽车的各种安全问题如电池包自燃,自动驾驶安全性等一直困扰着消费者 [1] 。汽车动力提供方式由传统燃油向新能源电池转型,新能源电动汽车碰撞事故频发再次引起人们对汽车碰撞安全的高度重视。由于电动汽车需要搭载质量较大的锂电池模组,直接导致了整车的质量增加,在碰撞发生时对电动汽车车身结构耐撞性和约束系统的乘员保护能力都提出了更加严苛的要求 [2] 。
在正面碰撞项目开发中驾驶员头部和胸部的伤害评分占比较高,主流的研究成果都是基于胸部和头部的伤害分析,只有很少一部分研究针对腿部伤害,例如江苏大学肖建中对乘员的安全带预紧限力进行了分析和研究,使用Hybrid系列中50th假人进行正交优化得出最优乘员保护组合;Nie Bingbing研究了膝部安全气囊(KAB)在汽车正面碰撞中对乘员保护的作用,进一步肯定了KAB的实用性 [3] 。正面碰撞给乘员腿部带来的伤害不可忽视,很多乘员的腿部受伤后恢复较慢,严重者甚至落下终身残疾。本文以某款新能源SUV为例,针对电动汽车正面约束系统开发项目过程中面临的驾驶员的胫骨指数和小腿压缩力超标问题即该款SUV的前期试验显示主驾驶胫骨指数(Tibia Index)和小腿压缩力(Tibia FZ)高于2021版C-NCAP (China-New Car Assessment Program)新车评价规程的高性能值0.4和2 KN。通过建立LS-DYNA约束系统CAE模型,对模型的设计参数使用正交试验设计的方法进行优化,最终寻找更优的设计方案,并用于后续的项目开发。
2. 约束系统模型建立和验证
2.1. 约束系统模型搭建
基于整车几何数据创建LS-DYNA约束系统模型,为了减小后续仿真求解的时间,需对模型进行必要的简化。在本文的SUV正面碰撞主驾约束系统模型中包含了白车身、地毯、制动和加速踏板、转向系统、仪表板、座椅、气囊、安全带和假人 [4] 。其中白车身模型可进行适当的简化和修改,通常只需保留地板、门框、防火墙、挡风玻璃、A柱和B柱。转向系统只保留转向管柱和方向盘,而转向轴、助力系统等与约束系统无关的部分在建模时可省略。仪表板模型包含CCB支架和仪表板塑料覆盖件。座椅模型包含座椅骨架和坐垫靠背发泡 [5] 。假人采用Hybrid-III 50%假人模型。约束系统有限元模型如图1所示,根据正面碰撞特性,加速度测点选在变形较小的B柱下方门槛梁处,在门槛梁与B柱交汇处建立加速度传感器。采用50FRB耐撞性模型中提取B柱下方加速度作为碰撞波形进行输入,B柱下方加速度波形如图2所示。
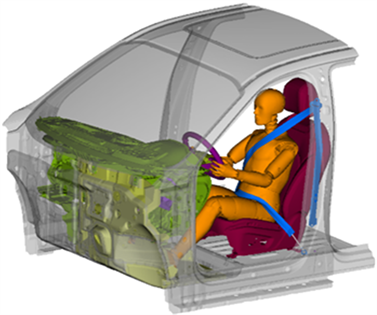
Figure 1. Constrained system LS-DYNA finite element model
图1. 约束系统LS-DYNA有限元模型
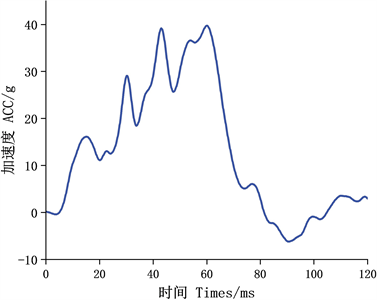
Figure 2. Acceleration waveform under column B
图2. B柱下方加速度波形
2.2. 安全带建模
在模型建立的过程中需要对子系统模型进行精细化建模,安全气囊是约束系统内最为重要的子系统。主驾安全气囊构成为上下两片圆状织物材料 [6] 。其内部设有排气孔和拉带。本文主驾气囊直径设为630 mm,左右两侧对称设置两个35 mm直径的排气孔。气囊网格平均尺寸采用4 mm的标准,上下拉带长度都设置为300 mm。网格划分完成以后需要对安全气囊进行折叠。折叠前的安全气囊如图3所示,折叠完成后的安全气囊系统如图4所示。
2.3. 假人安放
约束系统内假人模型的安放位置的准确与否,决定着模型的精度与仿真计算结果的准确性。根据2021版C-NCAP新车评价规程与滑车试验确定假人的H点的XYZ坐标值分别为1369.75,−390,−317.7;骨盆角为21.6˚。在进行位置放置时,假人该位置会与座椅模型产生干涉,因此要对假人进行预压处理。通过关键字*BOUNDARY_PRESCRIBED_MOTION_RIGID给假人施加Z向的强制位移的载荷,加载曲线横轴为时间,纵轴为位移,最大位移即为假人上移的高度50 mm。座椅发泡变形的网格结果通过Hyperview进行查看,通过导出命令中的solver deck导出变形后的坐垫网格来替换最初的网格单元 [7] ,预压完成的发泡座椅发泡如图5所示。
3. 约束系统有限元模型可靠性验证
将上文搭建的约束系统有限元模型使用LS-DYNA软件进行运算。约束系统运算后的结果需要进行可靠性验证。只有通过验证的有限元模型才能继续约束系统的项目开发。将从约束系统碰撞时序,假人伤害曲线,假人伤害评分结果这三个方面进行对标。滑车试验是验证被动安全系统功能的重要试验,其优点在于可高精度再现车辆碰撞过程,能够对约束系统进行快速评估。在碰撞试验过程中,涂装后的车辆将在一定的牵引力下达到试验车速(50 km/h),与固定壁障进行碰撞。驾驶员侧的Hybrid假人各部位的传感器将把试验数据记录下来,高速摄像机也会记录碰撞过程,整个滑车试验流程严格遵循2021版C-NCAP法规来保证结果的准确性。
3.1. 约束系统碰撞时序对标
仿真动画是直观有效地表达仿真过程,通过Hyperview打开D3PLOT文件,查看约束系统仿真动画。将仿真动画与试验录像逐帧对比。如图6所示,约束系统仿真动画与试验录像在20 ms,50 ms,80 ms,110 ms,基本吻合。该模型碰撞时序验证效果较好。
3.2. 假人伤害曲线对标
计算结束后打开Binout文件提取主驾假人伤害曲线并进行滤波,将提取的与试验曲线进行对标。对标结果如图7至图12所示,其中CAE为有限元仿真假人伤害结果曲线,TEST为碰撞试验假人伤害曲线。经过对标,发现假人头部合成加速度,胸部合成加速度,胫骨指数,右腿压缩力的仿真曲线与试验曲线波形吻合且波峰相近,假人的对标效果较好。

Figure 7. Injury curve of head resultant acceleration
图7. 头部合成加速度伤害曲线
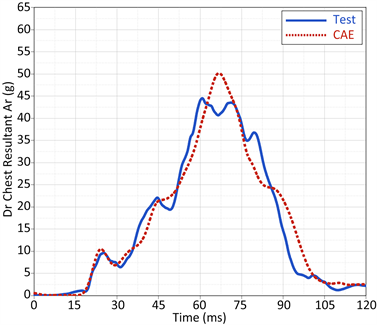
Figure 8. Injury curve of chest resultant acceleartion
图8. 胸部合成加速度伤害曲线
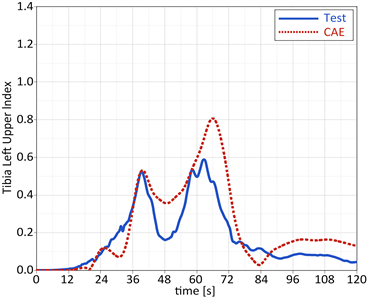
Figure 9. Injury curve of tibia left upper index
图9. 上左小腿上部伤害指数曲线

Figure 10. Injury curve of tibia left upper FZ
图10. 上左小腿上部压缩力伤害曲线
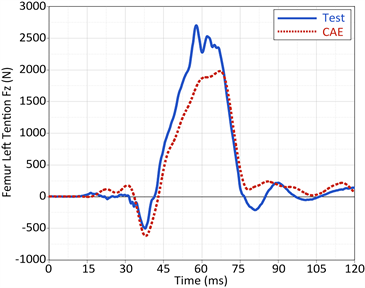
Figure 11. Injury curve of femur left tention FZ
图11. 左大腿压缩力曲线
3.3. 假人伤害评分的对标
约束系统的模型精度对仿真的结果影响重大,后续的优化效果都取决于约束系统的准确性。因此仅仅对约束系统的碰撞时序和假人伤害曲线的对标是不够的,还需要根据2021版C-NCAP对主驾假人的主要部位伤害进行评分。2021版CNCAP相较于2018版CNACP对假人的伤害评分准则有所改进,例如假人的头部伤害指数从36 ms改为15 ms,头部累积3 ms合成加速度的极限值也从88 g降低至80 g。假人伤害指标评分具体对标结果如表1所示。可信度达到85%便可以认为该指标验证合格,其中重点关注的Tibia Index和Tibia FZ可信度都大于95%认为该模型验证效果较好 [8] 。

Table 1. Comparison table of dummy injury scores
表1. 假人伤害得分对比表
4. 仿真结果分析与优化
4.1. 仿真结果分析
由结果可知,主驾假人的胸部压缩量伤害超过2021版CNCAP所规的高性能值22 mm。分析原因主要是因为电动汽车使用的锂电池模组作为动力系统,极大的提高了车身自重。对于新能源电动汽车发生碰撞时,为了保护锂电池模组的安全,对车身的前舱结构进行加强处理。结构与质量的双重影响下,导致了假人胸部伤害超标。与此同时,从仿真动画可以看到假人的腿部与仪表板撞击较为明显,假人的小腿伤害曲线也高于CNCAP的高性能值2 KN。孙振东等研究发现在正面碰撞发生时,假人的左小腿受到的力小于右小腿受到的力;小腿上部的力大于小腿下部受到的力 [9] ,本文约束系统模型也进一步验证该结论。
4.2. 约束系统的参数优化
在选择设计参数时考虑到主驾假人胸部压缩量伤害较大,在选择实际参数时既要顾及到影响胸部压缩量的设计参数,也要综合考虑腿部伤害优化的设计参数。防止出现假人小腿伤害符合高性能值,但假人胸部伤害超出低性能值。因为车型确定以后,腿部的布置空间和歇脚板角度已经确定,所以只能从其他外部因素进行优化 [10] 。较高的安全带限力值可以在碰撞发生时可以减少驾驶员假人向前移动的位移量,但是较高的限力值也会造成假人胸部压缩量的提高。综合考虑后选择了安全带点火时间,安全带限力值,假人与座椅发泡摩擦系数,假人与地毯摩擦系数这四个优化参数对这四个参数进行正交试验设计,构建4因素3水平的正交试验设计表。这些设计参数的初始值以及水平具体设定如表2所示。
如果进行全部试验需要进行81次试验,如果这些试验全部计算将花费大量时间与资源。因此本文采用L9.3.4的正交试验设计表,总共只需要进行9次 [11] ,具体设计如表3所示。
Table 3. Design table of orthogonal experimental
表3. 正交试验设计表
对表内9组设计方案进行求解运算,胫骨指数和小腿压缩力假人伤害指标进行统计,对表3内的运算结果进行极差分析,极差分析结果如表4所示。
根据极差分析结果可知,对小腿指数影响因素贡献的是B > A > C > D,其中最优组合为A2B3C3D3这一组合。该设计方案采用的是安全带点火时间13 ms,安全带限力值8 KN,假人与座椅的摩擦系数为0.3,假人与地毯的摩擦系数为0.3。将该设计方案使用LS-DYNA软件进行运算,优化后的伤害结果对比如表5所示。
Table 5. Comparison table of optimization
表5. 伤害优化后对比
5. 结论
本文针对电动汽车正面碰撞开发过程中遇到的腿部伤害超标问题,采用有限元建模方法进行模拟,通过正交试验设计和极差分析的方法,确定了影响假人小腿伤害的主要影响因子依次为:安全带限力值,安全带点火时间,假人与地毯之间摩擦系数,假人与座椅发泡之间的摩擦系数。确定后的设计方案为:安全带点火时间13 ms,安全带限力值8 KN,假人与地毯之间摩擦系数为0.3,假人与座椅发泡摩擦系数为0.3。优化后的假人小腿指数降低了29.63%,小腿压缩力降低了31.75%。
参考文献