1. 引言
随着科技不断向前发展,社会对于测绘实时性、准确性等方面提出了更高的要求,传统测绘利用水准仪、经纬仪、GPS-RTK、全站仪等设备进行测绘,传统测绘工作量大、耗时长、工作环境相对艰苦,在野外GPS卫星信号经常被干扰,在野外极端的环境中进行测绘,人身安全难以得到好的保护。近年来基于无人机平台技术的航空摄影测量发展越来越迅速,从而使得低空无人机技术测绘工作的应用范围越来越广泛 [1] ,例如在大比例尺地形图、公路水土保持监测、农村土地确权、矿山测量、灾害监测、军事方面的应用越来越多。研究模型精度对于测绘行业有着十分重要的意义。卢晓攀 [2] 根据三个平原测区影像,利用光束法区域网空中三角测量为原理,通过实验得出X方向中误差为0.043 m,Y方向中误差为0.053 m,平面坐标中误差为0.068 m。曹琳 [3] 以鲍旗寨社区为研究区域,采用无人机倾斜摄影测量技术建立三维模型,研究了模型的平面精度、高程精度、高度精度和长度精度。熊康妮 [4] 利用摄影测量技术研究DOM,DEM,DLG的成图精度,使用Context Capture软件处理航摄数据,最终对DOM,DEM,DLG模型进行精度评定,得出了测区DEM精度为0.5483 m,符合1:1000测图精度要求。测区DOM平面精度为0.528 m,满足1:1000正射影像图精度要求。卢伟 [5] 结合工程项目利用了光束法平差模型,对低空摄影测量影像进行了处理,得到三维倾斜模型,控制点X方向中误差0.2288 m,Y方向中误差为0.2462 m,高程中误差为0.3256 m。
关于像控点布设的形式,没有明确的规范要求。导致其在作业中存在像控点布设方案不明确,精度不稳定等因素。本文以攀枝花学院南苑山地区为研究区,采用大疆精灵4RTK无人机进行五向倾斜摄影测量,进行了5种不同的像控点布设方案对比研究,从高度、长度两方面分析了3D模型能达到的精度水平。
2. 像控点布控方案
攀枝花学院南苑地处攀枝花市东区,依山而建,地势高低不平,测区地面最高点高程大约为1214 m,最低点高程大约为1152 m,高差相差62 m,研究区属于山地区。本文以全野外布设像控点的方式,研究了山地区不同像控点对模型精度影响。共对比了5种不同的像控点方案。方案1采用了4点法,即在测区边缘选择4个像控点;方案2采用了5点法,即测区边缘4个像控点加测区中心1个像控点;方案3采用了9点法,在5点法的基础上,在四周加上4个像控点,方案4采用了12点法,就是在9点法的基础上加入3个像控点,方案5为全部控制点,对不同像控点方案对比分析模型精度。
3. 高度长度精度分析
通过外业实测地物最高点和地物最低点解算出地物的高度,与3D模型量测地物高度两者相比较。所有的地物绘制都是由点、线、面三个方面构成,几何结构的优劣对于最终成图精度有着很大的影响,而衡量几何结构的关系就是线段长度 [2] ,所以为了更好的满足实际工作需求,对长度进行精度评定。本文在测区共选择20个高度精度和20个长度精度,针对5种不同的像控点方案分别进行3D模型长度和高度的精度分析。
根据3D模型的高度精度规范应满足表1相关规定 [6] 。

Table 1. Height accuracy limited error
表1. 高度精度限差
3.1. 方案1高度长度精度要求
方案1高度精度统计如表2。从表2统计 可得出,研究区域模型高度精度中误差为0.1437 m,最大误差为0.168 m,最小误差为−0.353 m。高度精度分析如图1。从图1统计可得出,高度差值在−0.4 m和0.2 m之间,其中误差分布集中。根据表1可得,高度精度符合相应精度要求。
Table 2. Scheme 1 height comparison table
表2. 方案1高度对比表
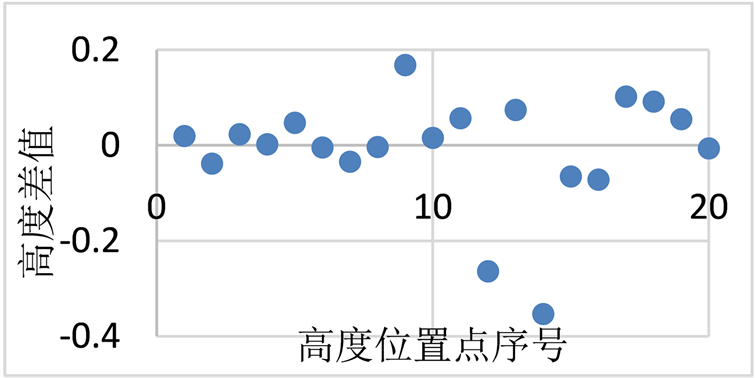
Figure 1. Scheme 1 height difference distribution map
图1. 方案1高度差值分布图
方案1长度精度统计如表3。从表3统计可得出,研究区域模型长度中误差为0.1662 m,最大误差为0.340 m,最小误差为−0.217 m。长度精度分析如图2。从图2统计可得出,高度差值在−0.4 m和0.4 m之间,误差整体呈现上升趋势。
Table 3. Scheme 1 length comparison table
表3. 方案1长度对比表
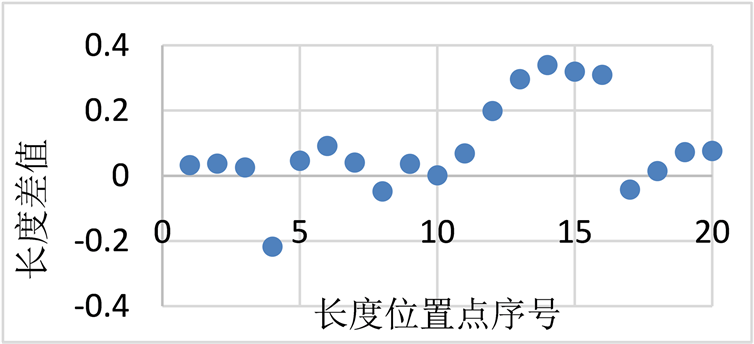
Figure 2. Scheme 1 length difference distribution map
图2. 方案1长度差值分布图
3.2. 方案2高度长度精度分析
方案2高度精度统计如表4。从表4统计可得出,研究区域模型高度精度中误差为0.1048 m,最大误差为0.176 m,最小误差为−0.145 m。高度精度分析如图3。从图3统计可得出,高度差值在−0.2 m和0.2 m之间,其中误差分布分散。对照表1中的规范要求,高度精度符合相应精度要求。
Table 4. Scheme 2 height comparison table
表4. 方案2高度对比表

Figure 3. Scheme 2 height difference distribution map
图3. 方案2高度差值分布图
方案2长度精度统计如表5。从表5统计可以看出,研究区域模型长度中误差为0.1878 m,最大误差为0.366 m,最小误差为−0.239 m。长度精度分析如图4。从图4统计可得出,高度差值在−0.4 m和0.4 m之间,长度误差整体呈现上升的趋势。
Table 5. Scheme 2 length comparison table
表5. 方案2长度对比表

Figure 4. Scheme 2 length difference distribution map
图4. 方案2长度差值分布图
3.3. 方案3高度长度精度分析
方案3高度精度统计如表6。从表6统计可得出,研究区域模型高度精度中误差为0.1127 m,最大误差为0.344 m,最小误差为−0.156 m。高度精度分析如图5。从图5统计可得出,高度差值总体分布−0.1 m和0.1 m之间,误差分布集中。对照表1中的规范要求,高度精度符合相应精度要求。
Table 6. Scheme 3 height comparison table
表6. 方案3高度对比表
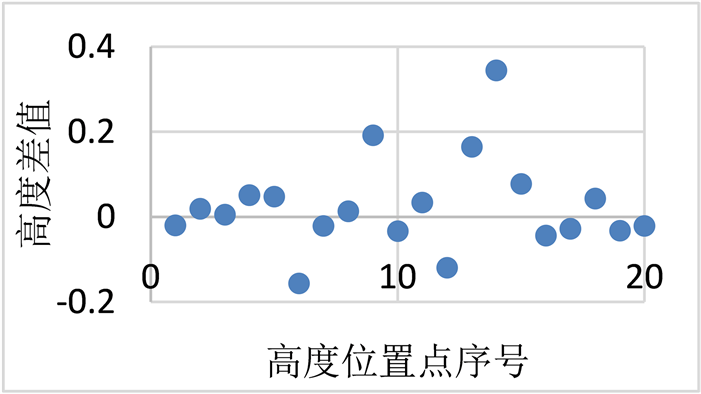
Figure 5. Scheme 3 height difference distribution map
图5. 方案3高度差值分布图
方案3长度精度统计如表7。从表7统计可得出,研究区域模型长度中误差为0.1674 m,最大误差为0.364 m,最小误差为−0.164 m。长度精度分析如图6。从图6统计可得出,高度差值在−0.2 m和0.4 m之间,长度误差整体呈现上升的趋势。
Table 7. Scheme 3 length comparison table
表7. 方案3长度对比表

Figure 6. Scheme 3 length difference distribution map
图6. 方案3长度差值分布图
3.4. 方案4高度长度精度分析
方案4高度精度统计如表8。从表8统计可得出,研究区域模型高度精度中误差为0.1305 m,最大误差为0.266 m,最小误差为−0.292 m。高度精度分析如图7。从图7统计可得出,高度差值总体分布−0.1 m和0.1 m之间,误差分布集中。对照表1中的规范要求,高度精度符合相应精度要求。
Table 8. Scheme 4 height comparison table
表8. 方案4高度对比表
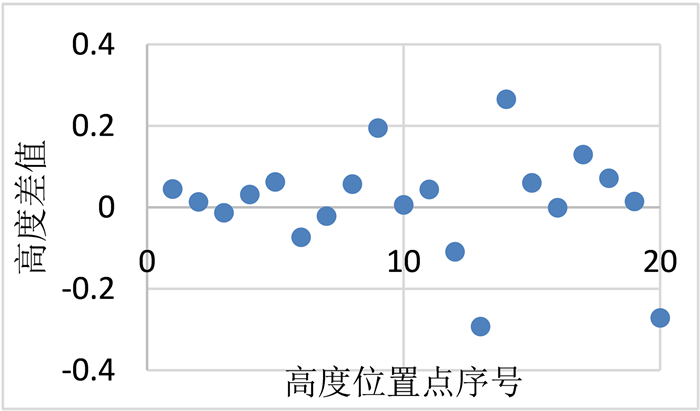
Figure 7. Scheme 4 height difference distribution map
图7. 方案4高度差值分布图
方案4长度精度统计如表9。从表9统计可得出研究区域模型长度中误差为0.1607 m,最大误差为0.344 m,最小误差为−0.1400 m。长度精度分析如图8。从图8统计可得出,高度差值在−0.2 m和0.4 m之间,长度误差整体呈现上升的趋势。
Table 9. Scheme 4 length comparison table
表9. 方案4长度对比表
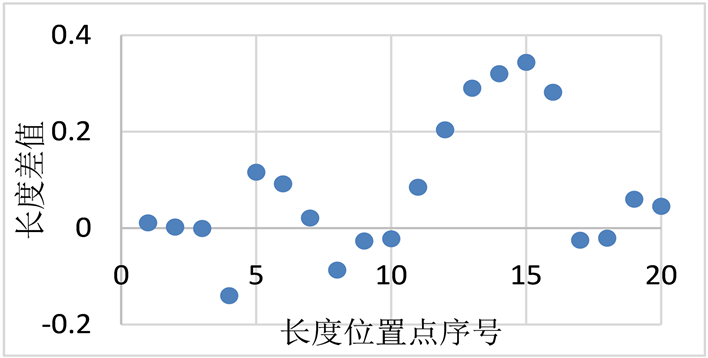
Figure 8. Scheme 4 length difference distribution map
图8. 方案4长度差值分布图
3.5. 方案5高度长度精度分析
方案5高度精度统计如表10。从表10统计可得出,研究区域模型高度精度中误差为0.1259 m,最大误差为0.1810 m,最小误差为−0.2740 m。高度精度分析如图9。从图9统计可得出,高度差值总体分布−0.1 m和0.1 m之间,误差分布相对集中。对照表1可得,高度精度符合相应精度要求。
Table 10. Scheme 5 height comparison table
表10. 方案5高度对比表
方案5长度精度统计如表11。从表11统计可得出,研究区域模型长度中误差为0.0617 m,最大误差为0.116 m,最小误差为−0.101 m。长度精度分析如图10。从图10统计可得出,高度差值在−0.2 m和0.4 m之间。

Figure 9. Scheme 5 height difference distribution map
图9. 方案5高度差值分布图
Table 11. Scheme 5 length comparison table
表11. 方案5长度对比表

Figure 10. Scheme 5 length difference distribution map
图10. 方案5长度差值分布图
3.6. 长度高度精度小结
高度精度中误差方案1布设方案中最大为0.1437 m,方案2布设方案中最小中误差为0.1048 m。高度中误差跟随像控点布设方案不断增加像控点,整体逐渐趋近于平稳状态,在0.10~0.14 m之间上下平稳波动,如图11。
长度精度中误差在方案2时精度最低为0.1878 m,在方案5法中精度最高其中误差为0.0617 m,长度中误差跟随像控点布设方案不断增加像控点,整体呈现不断下降的状态,如图12。
4. 结束语
研究了5种不同的像控点布设方案,运用外业长度、高度数据分析了3D模型能达到的精度水平 [6] 。依据三维地理信息模型数据产品规范,1:500、1:1000和1:2000山地区3D模型高度和长度精度限差分别为0.5 m、1 m和2 m。对3D模型进行精度评定 [3] 。研究结果表明方案1模型高度中误差为0.1437 m,长度中误差为0.1662 m。方案2模型高度中误差为0.1048 m,长度中误差为0.1878 m。方案3模型高度中误差为0.1127 m,长度中误差为0.1674 m。方案4模型高度中误差为0.1305 m,长度中误差为0.1607 m。方案5模型控制点高度中误差为0.1259 m,长度中误差为0.0617 m。由此得出,基于无人机倾斜摄影测量技术建立的3D模型已经具备测绘级精度,完全满足《三维地理信息模型数据产品规范》。