摘要: 长江上游陡岸水库具有地貌复杂、地形破碎、植被覆盖茂密等特点。针对陆上地形测绘采用人工走测方式难度大、效率低、风险大;采用航空摄影测量空域申请手续程序多、周期长、禁飞区多、受风力影响航飞风险大等问题,提出利用船载LiDAR获取水库陆上地形空间三维信息的方法。本文根据实验区检验点分析了船载LiDAR点云的精度。定性结果表明:船载LiDAR具有作业效率高、非接触等优点,适用于陡岸水库地形测绘。定量结果表明:高程较差中误差为0.145 m和0.211 m,点云精度满足大比例尺地形图测量规范要求。
Abstract:
The steep bank reservoir in the upper reaches of the Yangtze River is characterized by complex landform, broken terrain and dense vegetation. It is difficult, low efficiency and high risk to adopt manual surveying method for landform surveying and mapping. Based on the problems of aerial photogrammetry, such as long application procedures, long period, many no-fly zones and large flight risk affected by wind, a method of obtaining three-dimensional information of reservoir land-form space by shipborne LiDAR is proposed. In this paper, the accuracy of shipborne LiDAR point cloud is analyzed according to the test points in the experimental area. The qualitative results show that the shipborne LiDAR has the advantages of high efficiency and non-contact, which is suitable for the topography mapping of the steep bank reservoir. The quantitative results show that the er-rors in the difference of elevation are 0.145 m and 0.211 m, and the accuracy of point cloud meets the requirements of large scale topographic map measurement standards.
1. 引言
长江上游大型水库群多位于高山峡谷地区,气候条件恶劣,地形地貌复杂、植被覆盖茂密。高陡边坡陆上地形测量,采用全站仪、RTK作业效率低、周期长、成本高、风险源多。航空摄影测量空域申请手续程序多、周期长、禁飞区多、受风力影响,航飞风险大。21世纪初,美国等西方国家以测船为载体,通过集成三维激光扫描技术、高精度动态定位定姿技术和计算机技术为一体,开展船载LiDAR (Light Detection and Ranging)系统论证研究 [1] 。经过长期发展,船载LiDAR技术趋于成熟,国内外各大高校、公司都推出了多款实用型船载LiDAR系统。2010年,美国Geosolutions iLinks公司推出PMLS-1便携式激光雷达系统;2012年,中国中海达公司推出HiScan船载三维激光移动测量系统;2018年,中国华测公司推出HA-200船载三维激光雷达系统。因其具有精度高、自动化程度高和较强的植被穿透性以及非接触测量方式等特点,被广泛应用于海岸线测绘 [2] [3] 、崩岸监测 [4] [5] 、岛礁测绘 [6] [7] 、湖泊测量 [8] [9] 等领域。因此,本文基于船载LiDAR技术开展陡岸水库陆上地形测绘应用研究,为数字孪生流域数据采集提供技术参考。
2. 船载LiDAR技术
船载LiDAR技术以测船为移动载体,主要由三维激光扫描仪、GPS/IMU组合导航单元、CCD相机等组件构成,如图1所示。在测船航行过程中,时间同步控制器协同各组件获取河道陆上地形空间三维信息。三维激光扫描仪发射并接受激光束,记录点云的相对坐标;GPS/IMU组合导航单位定位POS中心大地坐标,继而解算点云的绝对坐标;CCD相机获取陆上地形纹理信息,图像融合形成真彩色点云。
船载LiDAR点云场景中包含丰富且复杂的非地面点属性物,如植被、桥梁、河堤、泊船、房屋等。生成数字高程模型(DEM)前,应通过点云滤波算法剔除非地面点 [10] 。2000年Axelsson提出渐进加密三角网滤波算法得到广泛使用 [11] ,并被集成到了TerraSolid、绿土360等商用软件。该算法主要思想是将整个点云数据划分成nRow行、nColumn列格网区块,如下式:
(1)
式中,m是最大建筑物尺寸;h是点云长度;w是点云宽度。
将每一个区块的高程最低点作为种子点,以种子点建立初始三角网TIN,该初始三角网TIN代表点云数据的概略地面点,通过对潜在点Pp和镜像点Pm逐点判定,依次迭代加密,过滤出地面点和非地面点。
3. 实验与分析
3.1. 实验区概况
本文于重庆市主城区(图2(a))、万州区(图2(b)))等地开展船载LiDAR在陡岸水库测绘中的应用研究。实验区位于长江三峡工程上游,属于典型的陡岸山区地貌,地形复杂破碎,人工走测难度大;区域内建筑物林立、植被覆盖茂密,通视条件较差;大部分河道位于禁飞区内,能有效验证船载LiDAR技术在复杂环境下的适用性和点云数据的精度。
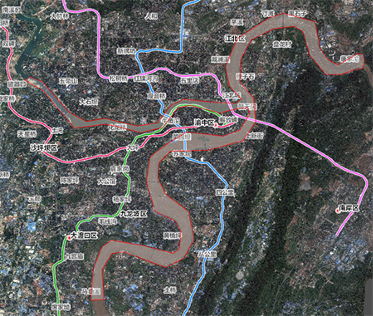 (a) 重庆市主城区
(a) 重庆市主城区  (b) 重庆市万州区
(b) 重庆市万州区
Figure 2. Study areas of shipborne LiDAR
图2. 船载LiDAR实验区
本次实验共采集89 km河段陆上地形点云,其中重庆市主城区(唐家沱–马桑溪)河段长38公里,涉及支流嘉陵江(朝天门–磁器口)河段长16公里;万州区(太龙镇–新田镇)河段长35公里。船载LiDAR点云,如图3所示。由图中可知,植被、滩涂、船舶、航道灯塔、建筑物等地物被成功扫描;滤波后,非地面点被有效滤除,部分误过滤、欠过滤区域进行手动交互保留地面点,可用于生产高精度DEM、DLG、断面图等数字产品。
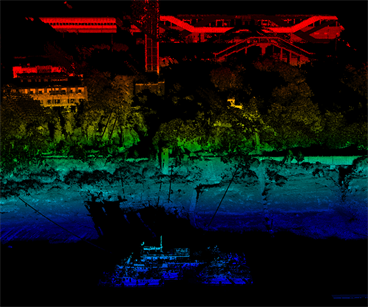 (a) 滤波前点云
(a) 滤波前点云 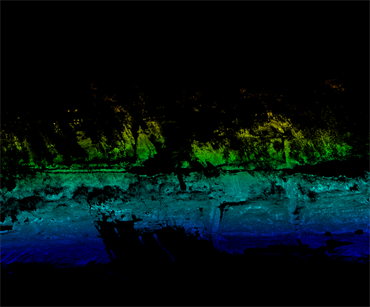 (b) 滤波后点云
(b) 滤波后点云
Figure 3. Shipborne LiDAR points cloud (rendered by elevation)
图3. 船载LiDAR点云(按高程渲染)
3.2. 精度分析
为了验证船载LiDAR点云的高程精度,本文使用RTK在测区采集检验点,并以检验点为中心提取邻近点云的高程进行精度分析,高程中误差如下式:
(2)
式中,HRMS为高程中误差;
为第i个检查点的高程;Hi为第i个邻近点云的高程;n检验点总数。
检验点与邻近点云高程较差分布图,如图4所示。由图4可知,重庆市主城区、万州区的检验点与邻近点云高程较差分布均呈高斯分布,高程较差分布为−0.3~0.3 m和−0.4~0.4 m,均值μ都趋近0。验证结果表明:船载LiDAR技术具有鲁棒性,测量误差整体稳定。
 (a) 重庆市主城区
(a) 重庆市主城区 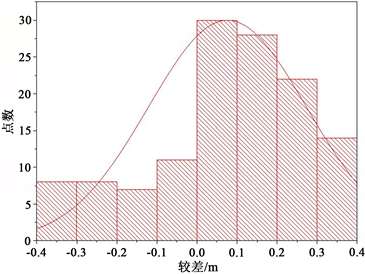 (b) 重庆市万州区
(b) 重庆市万州区
Figure 4. Distribution of elevation difference between test points and adjacent point clouds
图4. 检验点与邻近点云高程较差分布图
检验点与邻近点云高程较差中误差统计表,如表1所示。由表1可知,重庆市主城区点云高程较差中误差为0.145 m,重庆市万州区点云高程较差中误差为0.211 m。根据中华人民共和国水利行业标准《水利水电工程测量规范(SL197-2013)》中规定,1:500~1:10,000比例尺地形图(山地、高山地)的高程注记点允许中误差是±1/3h (h为基本等高距,m),最高标准1:500比例尺地形图的高程注记点允许中误差是±0.33 m。

Table 1. Statistical table of mean square error of elevation difference between test points and adjacent point clouds
表1. 检验点与邻近点云高程较差中误差统计表
验证结果表明:船载LiDAR点云高程精度满足1:500~1:10,000比例尺地形图制图要求。
4. 结论
本文针对陡岸水库地形复杂、风险源多、植被茂密、通视条件差、禁飞区多、无人机无法起降等问题,基于船载LiDAR技术开展了陡岸水库陆上地形测绘应用研究,得到结论如下:
1) 船载LiDAR具有自动化程度高、测量精度高等优点,较同等人工走测作业,作业效率显著提高400%以上。
2) 三维激光扫描技术属于非接触主动遥感技术,能有效降低野外作业风险,适用于陡岸水库陆上地形测绘。
3) 两份实验区,高程较差中误差分别为0.145 m和0.211 m,取得了较高的精度,点云精度满足大比例尺地形图测量规范要求。
4) 船载LiDAR点云成果表达丰富,可用于制作DEM、DLG、断面图等三维可视化数字产品,能有效为数字孪生流域建设提供数据支撑。
基金项目
长江委水文上游局科技创新基金项目(SYJ-KJCX23HD002)。
NOTES
*通讯作者。