1. 概述
沿海滩涂是我国重要的后备土地资源,但辽宁省基础地理信息数据库缺少我省滩涂区域基础地理信息数据内容,这些数据对于沿海滩涂的管理、开发、利用等多方面具有重要作用。本论文以机载激光扫描系统采集盘锦沿海滩涂地理信息数据的项目为基础,研究该方法的优势及不足之处,为我省今后更好地获取滩涂地理信息数据提供宝贵经验,本项目也是辽宁省首次利用国际上先进航摄技术在全省沿岸滩涂区域进行大面积数据采集工作 [1] [2] [3] [4] [5] 。
2. 机载激光扫描系统简介及项目主要技术流程
盘锦沿海滩涂基础地理信息数据获取项目使用的是瑞士徕卡生产的ALS70-HP激光扫描系统,该系统配有航空数码相机,相机型号:RCD30航空数码相机,焦距52 × 10−3 m,像元大小6 × 10−6 m,幅宽9000像素 [6] 。机载激光扫描系统见图1,系统性能见表1。

Figure 1. ALS70 airborne laser scanning system
图1. ALS70机载激光扫描系统

Table 1. ALS70 performance parameters
表1. ALS70性能参数
主要技术流程见图2。
3. 沿海滩涂基础地理信息数据获取
3.1. 任务区简介
作业区范围西起盘锦入海口,东至营口盖州区域,海岸线长160公里,包括海滩涂、滩涂沼泽和沿海河滩。测区潮汐属不规则的半日混合潮,每天出现涨潮两次,落潮两次,农历初一和十五前后分别出现一次大潮。
3.2. 航摄时间的选择
项目执行期间,要求准确测出最低潮线的位置。根据测区潮汐规律,测区每个月都有两次大潮期,我们将航空摄影时间集中在这段时间。因此我们每次航摄时间都是在最低潮时,同时要顾及天气晴朗,无云的情况下才能进行航摄,这对航摄的条件要求十分苛刻。我们主要在中国海事服务网(http://ocean.cnss.com.cn/)提供的潮汐表中获取了可靠的每月大潮期最低潮时间数据,并保证了在最低潮时间航空采集数据。
3.3. 航线设计
由于我们使用的机载激光扫描系统既有雷达传感器,还带一台框幅式数码相机,因此航线设计主要难点在于如何合理确定飞机飞行高度,可兼顾两种设备的性能,在高效获得沿海滩涂足够多的点云数据同时还能拍摄到高质量的影像,使机载激光扫描系统发挥最大的作用 [7] [8] [9] 。
项目成果规范要求沿海滩涂上点云的平均密度要每平方米不少于1个点,因此我们采用多脉冲设计方案,并结合飞机飞行速率、扫描带宽、相机焦距、扫描波形等,将这次飞行任务的航高设计为2500 m (海拔高)。因为我们选用的飞机为运-5飞机,该飞机如果飞行高度超过3000 m,飞行效率会降低,同时氧气稀薄,会影响摄影员工作;如果飞行高度低于2500 m,机载激光扫描系统的工作效率将降低,因此综合考虑设定飞行高度为2500 m。并根据地形特点,将测区划分为两个航摄分区。通过航线设计软件计算得出沿海滩涂激光点云密度可达到每平方米2.2个,影像分辨率可达到0.32 m,这为我们后期制作沿海滩涂的DEM及DLG提供优于规范要求的原始数据。
航线设计具体参数见表2,航线设计图见图3。飞机型号:运五飞行速度160公里/小时。
Table 2. Table of main parameters of route design
表2. 航线设计主要参数表

Figure 3. Route layout of the survey area
图3. 测区航线布设图
3.4. 检校场布设
本项目使用的机载激光扫描系统ALS70,它的激光发射器视准轴与IMU视准轴、RCD30相机视准轴与IMU视准轴不平行,存在系统误差,该误差随着时间而变化,具有不固定性。因此为保证数据的准确性,在航空数据采集前,需要建立检校场,进行系统误差校正。因此,我们分别为激光扫描器和相机分别布设了检校场。检校场区域内地面必须平坦,且多为裸露地表、多斜顶的厂房,边界明显,以便点云数据的识别和量取。
激光检校场共设计3条航线,每条航线长度3~5公里,其中一条主航线正下方要有平直路面(roll检校),平直路面3公里区间内需要每隔5 m测量一个精度为0.05 m以内的平高控制点(range检校),另2条航线正下方须有尖顶房屋(pitch/heading检校),并且需保证有60%的旁向重叠,在中心区域均匀布设10~15个精度优于0.05 m的平高控制点,所有控制点都布设在路面上,且地物材料均匀,避免高低反射率交接地区,避免周围地物遮挡,避免在陡坎和地物过度边界、便道边缘布设。
相机检校场设计2条航线,90度垂直交叉布设。检校场内不得有大面积水域,若在城区,应避免太多高层建筑,检校场中心区域和四角应各布设3~5个控制点,用以检查原始POS精度。
其中激光检校场飞行高度要求为2400 m,相机检校场飞行高度为1500 m (设备厂商建议)。检校场布设见图4。
3.5. 航空摄影实施
项目中使用的飞机为运-5飞机,飞机时速160公里。选择两个国家B级点作为地面基站,一个主基站,一个备用,与空中GPS进行实时差分,这两个基站距离测区最远距离均小于50公里(设备厂商建议的距离,以保证后期内业数据处理的精度)。架设基站的GPS选择由其重要,一定要选性能稳定的GPS,采样间隔设置为0.5秒,如GPS性能不稳定,则最后期成果精度影响很大,甚至导致地面基站数据不可用。
由于机场距离沿海滩涂有一定的距离,因此我们每次飞行都会在最低潮时间的前半个小时飞到测区,等到最低潮时间我们从最靠海的一边开始采集数据,逐条航带往岸边推进,数据采集期间尤其重要的一点是一定要保证第一条航带既有海水还有滩涂,这才代表准确获取了最低潮线的位置,使沿海滩涂基础地理信息数据更加准确完整;如果不是,则需要下次补飞。
3.6. 航摄数据处理
ALS70机载激光扫描系统自带CUS6型号IMU,根据其精度高、频率高等特点,该系统后期飞行数据处理全面采用DGPS/IMU紧耦合差分技术进行解算,通过选取观测质量好的基站并严格控制航摄分离度等指标,使获取到的飞行轨迹数据位置精度达到最优。利用徕卡公司的GPS差分软件IPAS TC对机载GPS数据、IMU数据、基站GPS数据进行联合解算,解算结果应满足GB/T 27919.1-2011《IMU/GPS辅助航空摄影技术规范》规定,即平面偏差值小于0.2 m,高程偏差值小于0.4 m,速度偏差值小于0.5米/秒。
飞机轨迹位置精度基本可以达到0.05 m。将差分后的轨迹文件与LIDAR采集的数据相结合,对LIDAR采集的数据进行了准确定位。通过外业打点检查,项目成果平均高程中误差达到0.25 m,优于DEM制作规范要求的0.5 m。整个测区的激光点云数据处理没有使用一个外业控制点,真正做到了免外控,极大提高工作效率。同时RCD30相机拍摄的影像分辨率达到0.32 m,完全满足制作沿海滩涂1:5000比例尺DLG精度要求。
3.7. 点云数据处理
点云数据处理前需要利用似大地水准面精化成果将原始点云数据大地高转换为1985国家高程基准的正常高,并保证高程系统转换中误差小于产品中误差值的0.5倍。
同时,为减少航带重叠区冗余数据对后期数据处理的影响,需滤除航带重叠区的冗余数据,并将冗余数据存放在航带重叠点类中。最后按照实际作业要求及数据量大小进行分块处理。
使用TerraSolid软件对获取的点云数据依次进行点云数据去除噪声点处理、点云自动滤波分类、人工精细分类,获取到的真实的地面点,并构建模型,经图幅裁切后,构建数字高程模型,经图幅裁切、接边处理,最终制作出符合要求的数字高程模型产品
3.8. 精度检测
本项目对点云数据成果、DEM、DLG成果都进行了精度验证。其中,对于点云数据,主要分布了10各精度验证区,每个区内打20个精度检查点,这些精度验证区基本是离基站较远,在测区边缘等精度较弱的区域,检查点高程中误差达到0.141 m,优于规范要求。对于DEM、DLG,各取图幅数的8%比例进行外业打点核查,其高程中误差优于0.5 m,满足规范要求。
4. 盘锦沿海滩涂基础地理信息数据部分成果
本项目通过使用ALS70机载激光扫描系统,既获取了盘锦沿海滩涂的点云数据,又获取了沿海滩涂的影像数据,通过两种数据,我们制作了盘锦沿海滩涂的DEM及DLG。
由于点云本身并不具有它所表达地物的属性信息,因此,要获取所表达地物的属性,则需对点云进行分类处理,按照不同地表物体的反射特性、形状特征等,将表达不同类地物的点云进行区分。同时,通过分类,确定表达地面真实形态的地面点云,由地面点生成高精度数字高程模型(DEM),部分DEM成果见图5,部分DLG成果见图6。
项目成果不仅扩充了辽宁省基础地理信息数据库内容,弥补其在沿海滩涂区域的空白,同时也真实体现出我省沿海滩涂区域地势性质、特点、布局规划、利用等现状,在国土资源管理、沿海规划建设、沿海工程建设等多领域发挥重要作用。
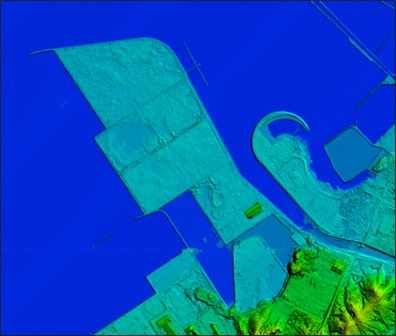
Figure 5. Some DEM results along the beach
图5. 沿海滩涂部分DEM成果
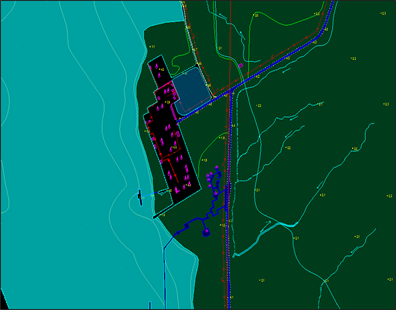
Figure 6. Some DLG results along the beach
图6. 沿海滩涂部分DLG成果
5. 结束语
5.1. 机载激光扫描系统获取沿海滩涂基础地理信息数据相比传统方法的优势
本次作业期间利用机载激光扫描系统不仅准确获取了最低潮线数据,也获得了相当丰富的沿海滩涂地理信息数据,点云数据量大,对沿海滩涂地形表达的更加细腻,地形起伏表现的更加清晰准确,这些效果是传统方法达不到的。同时航摄成果具有高密度、高精度、外业及后期制作成本低等特点,大幅度减少了内外业作业时间,相对于传统方法可有效提高作业效率,工期大大缩短,降低成本。
5.2. 机载激光扫描系统获取沿海滩涂基础地理信息数据的不足之处
由于本项目使用的机载激光扫描系统ALS70属于陆域测量型,因此对于沿海滩涂上的潮沟、养殖塘等有水区域的范围内基础地理信息数据无法获取,在这些区域需要用其他方式获取数据。具有测深功能的LIDAR因其激光能穿透海水至海底是最高效的,但由于辽宁沿海地区海水比较浑浊,激光很难穿透海水至海底。
潮沟及养殖塘等有水区域的基础地理信息数据可由无人船来完成,无人船测深技术可有效解决河流入海口、潮汐沟、浅水区、养殖塘等机载激光扫描系统扫描不到的地方,其工作效率相比传统测量方式有很大的提高,同时也不需要测量人员进入测区,安全性也很强。因此,如果机载激光扫描系统能与无人船相结合,充分利用各自的优势进行互补,则获取的沿海滩涂基础地理信息数据将更加精准完善。