1. 引言
无人机航空摄影测量由于机动性强、操作便捷、测量精度高、风险低、图像数据采集分辨率高等优点,在测绘、地质、农业、电力等许多行业都得到了广泛应用 [1] ,空三解算精度直接影响4D产品的精度,像控点的布设是影响空三解算精度的关键因素之一,国内外学者已经开展了很多研究。卢晓攀 [2] 根据三个平原测区影像,利用光束法区域网空中三角测量为原理,通过实验得出X方向中误差为0.043 m,Y方向中误差为0.053 m,平面坐标中误差为0.068 m。李明慈 [3] 对基于多视图几何空三解算背景下的空三控制点布设方案进行试验,得出小区域的基于多视图几何的空三解算控制点布设,控制点个数选择5~12即可满足空三解算的精度要求,更多的控制点对精度没有提高,反而提高了成本。曹琳 [4] 以鲍旗寨社区为研究区域,采用无人机倾斜摄影测量技术建立三维模型,研究了模型的平面精度、高程精度、高度精度和长度精度。熊康妮 [5] 利用摄影测量技术研究DOM,DEM,DLG的成图精度,使用Context Capture软件处理航摄数据,最终对DOM,DEM,DLG模型进行精度评定,得出了测区DEM精度为0.5483 m,符合1:1000测图精度要求。测区DOM平面精度为0.528 m,满足1:1000正射影像图精度要求。卢伟 [6] 结合工程项目利用了光束法平差模型,对低空摄影测量影像进行了处理,得到三维倾斜模型,控制点X方向中误差0.2288 m,Y方向中误差为0.2462 m,高程中误差为0.3256 m。本文以攀枝花学院南苑1:500地形图测绘区块为研究区,在较密集的控制点像控方案的基础上,对控制点进行了抽稀试验,研究了不同控制点方案对空三解算精度的影响。
依据《三维地理信息模型数据产品规范》的规定,1:1000的成图比例尺对空三解算精度的规定,平原区平面位置控制点中误差限制为0.3 m、高程中误差限制为0.2 m [7] 。
2. 像控点布设方案及其航线规划
2.1. 像控点布设方案
本文以攀枝花学院南苑为研究区,其地处攀枝花市东区,依山而建,地势高低不平,测区地面最高点高程大约为1214 m,最低点高程大约为1152 m,高差相差62 m,研究区属于山地区。本文以全野外布设像控点的方式,研究了山地区不同像控点对模型精度影响。共对比了5种不同的像控点方案。方案1采用了4点法,即在测区边缘选择4个像控点(图1(a));方案2采用了5点法,即测区边缘4个像控点加测区中心1个像控点(图1(b));方案3采用了9点法,在5点法的基础上,在四周加上4个像控点(图1(c)),方案4采用了12点法,就是在9点法的基础上加入3个像控点(图1(d)),方案5为全部控制点(图1(e)),对不同像控点方案对比分析模型精度。
2.2. 航线规划
进行无人机低空摄影测量对影像的获取的时候,首先要对无人机进行参数设置,包括有航向重叠率和旁向重叠率,无人机的飞行速度,返航点设置,低电量警报,航线规划等。本次设置航线规划为五向飞行,航线规划如图2。
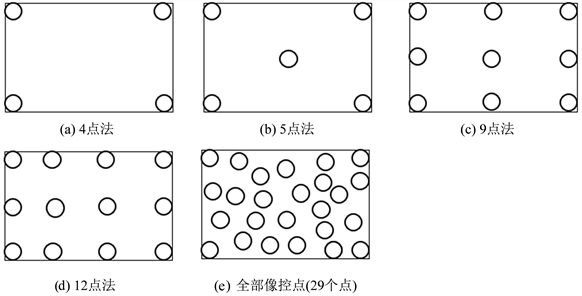
Figure 1. Layout of image control points scheme
图1. 像控点布控方案
航向重叠度和旁向重叠度设置分别为60%和40%,无人机航线的飞行速度为7 m/s,设置航高为100 m,按航线距离进行拍摄,相机拍摄照片比例为3:2。进行飞行之前应考虑飞行环境,气温条件,风速大小,大雾天气等。本次测区在攀枝花市攀枝花学院,气温常年平均在20℃左右,选择在下午3点钟进行拍摄,阳光充足,满足飞行条件,当设置好各项的飞行参数就可以设置该飞行任务名,设置返航点,点击上传航线,起飞时应选择地势相对平坦,周围遮挡物较少的地方。无人机在飞行过程中还应实时关注无人机飞行状况,观察无人机电池电量消耗状况,无人机飞行过程中是否会撞到周围障碍物,无人机飞行过程中信号是否存在丢失情况等各种问题,需要实时的关注无人机遥控器并及时根据所可能发生的问题而及时做出相应的应对措施。
3. 精度评定
根据公式(1),对控制点和检查点,计算了不同方案对应的平面点坐标中误差和高程坐标中误差。
(1)
中误差越大,观测精度越低。中误差越小,观测精度越高,方差值越小,数据越集中,方差值越大,说明数据越离散 [3] 。
三维模型平面精度根据规范应满足表1的相应规定。

Table 1. Precision specification for plane coordinates
表1. 平面坐标精度规范
由表1可得控制点精度满足三维模型精度规范要求。
三维模型的高程精度通过高程中误差来进行评定,根据不同的成图比例尺对中误差不同的要求,中误差应满足表2相应规定 [2] 。
Table 2. Accuracy specification for elevation coordinates
表2. 高程坐标精度规范
3.1. 平面坐标精度
本文在整个测区共布设29个控制点和35个检查点,根据不同的像控点像控方案,对野外RTK实测坐标与三维模型坐标进行比较,计算中误差和坐标中误差来衡量三维模型的精度 [4] 。
3.1.1. 控制点精度
在X方向中误差最大为0.255 m,最小为0.2262 m,在Y方向中误差最大为0.679 m,最小为0.0527 m,坐标中误差的最大为0.2466 m,最小为0.2334 m (图3)。
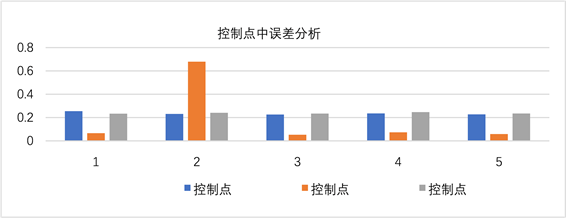
Figure 3. Error analysis of control point plane coordinates
图3. 控制点平面坐标中误差分析
由图3可知,5点法像控方案的Y方向中误差最大,X方向中误差和坐标中误差都大致相同。
3.1.2. 检查点精度
X方向中误差最大的在4点法像控方案,中误差为0.3714 m,中误差最小的在5点法像控方案最小为0.317 m,Y方向中误差最大的在4点法像控方案为0.0576 m,最小在12点法像控方案为0.0457 m,坐标中误差最大中误差在4点法像控方案中为0.3758 m,最小在5点法像控方案为0.3216 m。如图4。
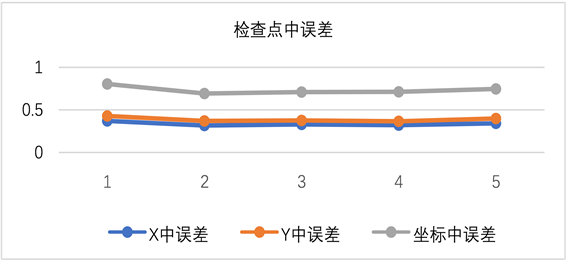
Figure 4. Error distribution in the plane coordinates of checkpoints
图4. 检查点平面坐标中误差分布
3.2. 高程精度
3.2.1. 控制点高程精度
高程精度最大中误差在9点法像控方案中为0.1911 m,最小中误差在29点像控方案中为0.0847 m。如图5。
由图5可得高程误差在9点法像控方案最大,除9点法以外,总体呈现一种下降趋势。
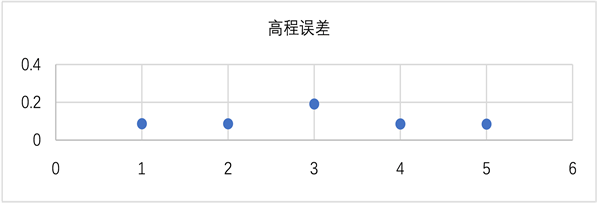
Figure 5. Trend chart of mean square error in control point elevation coordinates
图5. 控制点高程坐标中误差趋势图
3.2.2. 检查点高程精度
检查点高程中误差在5点法像控方案中最小为0.0763 m,在4点法像控方案中误差最大为0.0925 m (图6)。
由图6可得,高程误差在4点法像控方案中误差最大,随着像控点的增加,总体呈现下降趋势。
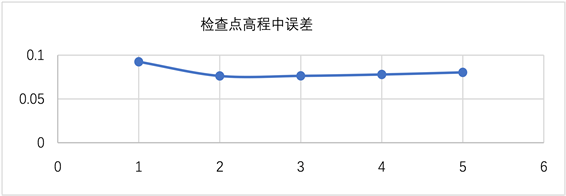
Figure 6. Trend of mean square error in checkpoint elevation coordinates
图6. 检查点高程坐标中误差趋势
4. 结束语
像控点的布设是影响空三解算精度的关键因素之一。本文以攀枝花学院南苑校区、比例尺要求1:1000的航测项目为例,研究了山地区5种不同像控点方案对模型精度的影响,得出如下结论,对于小区域的航测项目,5个以上的控制点能满足精度要求,选择5~12个控制点都是可行的,继续增加控制点对空三解算精度没有提高,反而浪费了成本。本文可为低空无人机摄影测量测图提供实践指导。