1. 引言
紫外可见分光光度计是非常重要的分析仪器,无论在物理学、化学、生物学等科学领域,还是在医药、环境检测、冶金等现代生产与管理部门,紫外可见分光光度计都有着广泛的应用。紫外可见分光光度计有着较长的历史,其主要理论框架、制作技术相对成熟。但构成紫外可见分光光度计的光学、机械、电子、计算机等任何一个方面的新技术都可能再推动紫外可见分光光度计整体性能的进步 [1] [2] 。
近年来,由于分光光度计的高速发展,对仪器的分辨率、测量范围、灵敏度、速度、集成化、一体化等方面提出了更高的要求。目前,国内分光光度计以双光束居多,因为双光束可以抵消掉大部分杂散光和光源波动等因素影响,测得的指标较精准,但是其价格较贵,体积较大。针对以上为题,设计单光束分光光度计,单光束分光光度计因本身的硬件结构问题,测量的指标误差较大。本文先分析了影响单光束分光光度计测量准确度的因素,通过软件算法的方式对硬件所造成的问题进行弥补,使仪器在控制成本和缩小体积的前提下,提高测量精度 [3] [4] 。
2. 系统结构及原理
2.1. 系统结构
为提高硬件系统数据处理能力,采用基于ARM Cortex-M4内核的高性能微处理器STM32F407ZGT6作为控制核心来控制分光光度计的测量系统。系统的框架如图1所示,下位机主要包括Cortex-M4主控制单元、光源模块、分光系统、光电检测模块、放大及信号采集模块、串口通信、电机驱动及光电开关检测系统。光源系统主要为后续检测提供复合光,稳定的光源是保证系统能稳定工作的关键。分光系统将复合光分解为各个波段的单色光 [5] 。光电检测模块和放大及信号采集模块目的将光信号转换为电信号,并将电信号放大到后续操作所需要的范围 [6] 。为了使仪器正常运作,系统各部件均用电机控制驱动。上位机主要完成程序设计,发送指令、数据处理及显示等。整体的系统状态则通过检测光电开关的位置进行实时判断。下位机采集到的数据通过串口传输到上位机,上位机进行数据处理并显示数据。
2.2. 分光光度计的原理
分光光度法基于量子论以及物质对光的吸收等理论基础,物质吸收光谱本质上就是物质中的分子和原子吸收了入射光中的某些特定波长的光能量,相应地发生了分子振动能级跃迁和电子能级跃迁的结果。依据普朗克(Planck)的量子理论,光具有粒子性和波动性,是具有不连续能量的微粒,每种频率的光的能量都是以光子为最小单位,光子的能量与频率的关系成正比,即:
(1)
其中h为普朗克常量,数值为6.63 × 10−34 J∙s [7] 。
由于各种物质具有不同的分子、原子和不同的分子空间结构,其吸收光能量的情况也不同,因此每种物质就有其特有的、固定的吸收光谱曲线,可根据吸收光谱上的某些特征波长处的吸光度的高低判别或测定该物质的含量,这就是分光光度定性和定量分析的基础 [8] 。分光光度计的理论基础是朗伯–比尔(Lambert-Beer)定律。即物质在一定浓度 的吸光度与它的吸收介质的厚度呈正比,其数学表示式如下:
朗伯–比尔定律的数学表达式为:
(2)
式中:A——物质的吸光度;
I0——入射的单色光强度;
I——透射的单色光强度;
T——物质的透射比;
K——物质的吸光系数,单位为L/(mol∙cm);
l——被分析物质的光程,即液层厚度,单位为cm;
c——物质的浓度,单位为mol/L。
3. 影响光度计测量准确度的因素分析及修正方法
3.1. 影响光度计测量准确度因素分析
影响单光束分光光度计测量精度的因素有很多,其中包括波长的准确度、光度噪声、暗电流及接收器等因素。波长准确度是指波长的实际测定值与理论值的差,每台分光光度计的硬件结构及安装过程都会造成波长的误差。光度噪声主要来源于硬件电路部分,电路中的电子元器件、传输线种类及放大电路的结构和倍数都会产生不同程度的噪声。在电路中设计滤波电路降低噪声,但是滤波电路滤除噪声的能力有限,故需要上位机通过软件算法的方式再次进行滤波。图谱台阶形成的原因可以分为两个部分,第一个就是暗电流部分,暗电流值是硅光电池在没有光的情况下,系统检测到的吸光度或透过率值,其反映光电池和放大器在静态噪声与漂移的总和。另一个部分就是接收器,由于设计的仪器测量范围从紫外可见段到近红外段,紫外可见段的接收器选用硅光电二极管、近红外段的接收器选用铟镓砷,由于两者在切换的波长点处响应速度低,造成图谱在切换处有一个随机的台阶。
3.2. 波长矫正
波长矫正利用多项式最小二乘法拟合原理,公式如下:
(3)
即函数模型纵坐标与散点值纵坐标的差值平方之和最小时,认为拟合度最好。用二阶多项式
对波长曲线进行拟和,要使结果最小,则参数a、b、c应满足各项偏导数为零,因此可引入矩阵进行求解,最后解的a、b、c的值,即可得到通式。当进行扫描波长时将测得的波谷实际波长点值带入通式与标准波长点值进行拟合计算,所得结果即是使误差最小的结果 [9] 。
波长矫正软件流程图如图2所示。当系统复位完成后,将参数a、b、c赋予初值,进行基线扫描,基线扫描是对“空白样品”进行扫描,即在不放置样品的情况下扫描,用来确定样品测量时的基准及抵消单色光对本底的吸收。基线扫描后将波长样品放入样品室再次进行扫描,测得的数据由上位机进行显示,读取样品的波谷值与标准波谷值进行拟合计算,将所有的值通过二次多项式进行拟合计算,接着上位机将拟合的参数下发到下位机,下位机进行矫正。波长矫正完后,波长所对应的能量会发生变化,所以需要重新做基线,以此为基准,再次扫描波长样品,得到的波谷的数据与标准值再进行对比,当紫外可见段的波长误差值在±1 nm以内,近红段的波长误差值在±4 nm以内,则说明波长矫正完成。
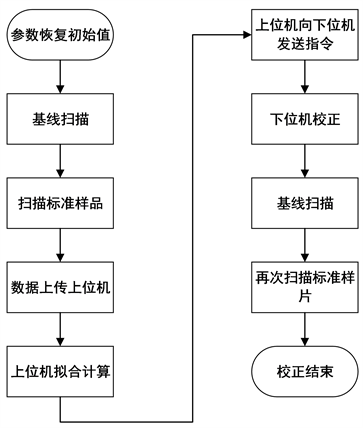
Figure 2. Wavelength correction flow chart
图2. 波长矫正流程图
3.3. 降低噪声
在光谱分析数据预处理的方法中通常采用Savitzky-Golay滤波器(S-G)方法来进行原始数据的平滑与去噪 [10] 。由于实验环境和仪器等因素的影响,原始光谱数据通常会包含噪声数据,采用S-G平滑算法可以去除噪声数据,同时可以保留光谱中的有效信息 [11] 。S-G方法是应用十分广泛而有效的平滑和求导预处理方法,其中平滑点数的设置非常重要,点数过少容易产生新误差,点数过多则容易使包含信息的光谱数据磨光丢失,都会造成模型精度下降。
S-G平滑算法是根据最小二乘拟合原理进行滤波。以
为中心点,左右各取M个样本点,即构造一个以
为中心包含2M + 1个采样点的窗口数组,而后构造一个P阶多项式
来拟合该数组,
,
,定义函数:
(4)
以2M + 1为窗口进行移动,得到原始数据除首尾两端各M个点外的平滑点。在拟合过程中,过于偏离正常趋势曲线的噪声部分会被丢弃,用拟合值代替原始数据,进而可以达到去除高频噪声的目的 [12] 。在扫描一组数据之后,上位机将数据进行一次平滑处理。
3.4. 图谱台阶消除
对于暗电流所照成的台阶,会使样品的透过率值偏高,软件利用校零的思想将其影响降到最低,保证在没有光的情况下所测得的透过率值为0%。具体方法如下,先进行能量分布,测得每个波长段所需要的增益值并存入Flash中,再根据Flash中的增益使仪器在没有光的情况下进行光谱扫描,测得透过率值即零线数值,然后把透过率值存入Flash中,之后再测标准样品时,上位机通过编程将测得的透过率值减去相对应的零线数值,即可得到真实的数值。
对于接收器所产生的台阶,上位机采用系数补偿的算法,接收器在860 nm处进行切换,在采集数据时,将数据采集到861 nm,计算出系数。如公式5所示,系数A为860 nm处的透过率值与861 nm处的透过率值得比值,860 nm后的每个测量的波长点都要乘以系数进行弥补。如公式6所示,T'表示弥补之后的透过率值,T表示实际测量的透过率值。
(5)
(6)
4. 实验分析
测试结果如下:
1) 波长矫正
测试条件为透过率方式,波长范围为300 nm~850 nm,光源选择全自动模式,采样间隔为0.1 nm,波长重复性与波长准确度同样重要。对于同一物质,不同波长下测试会有不同的灵敏度。波长的重复性将直接影响到是否可得到可靠的数据 [13] ,故为检验仪器的稳定性,对样品进行4次重复扫描。紫外可见波段的波长准确度误差要求在±1 nm以内,重复性在0.3 nm以内。先对标准波长片进行扫描,读取特征波长的波长点,再采用最小二乘矩阵拟合的方法进行波长矫正,将拟合的参数传入下位机,重做基线之后对标准波长片进行二次扫描,最终读取的数据如下列表1所示。从实验数据中可以看出,波长在未矫正之前,波长与标准波长的误差在±2 nm以内,矫正波长之后,波长的误差在±1 nm以内,反复对样品进行测试,重复性均在0.3 nm以内,对比没矫正之前,波长的准确度有明显的提高。

Table 1. Wavelength accuracy and repeatability test results
表1. 波长准确度及重复性检测结果
2) 降低噪声
用Matlab处理数据,对比各种方案之后,最终采用7点为一个窗口,拟合成3次多项式,如图3所示为仪器所测得的基线图谱(即不放置样品时所测得的透过率值),蓝色曲线为原始图谱,红色曲线为经过S-G处理过后的图谱。由图可观察到S-G算法对图谱有平滑去噪的作用,并且保留了原始的数据。
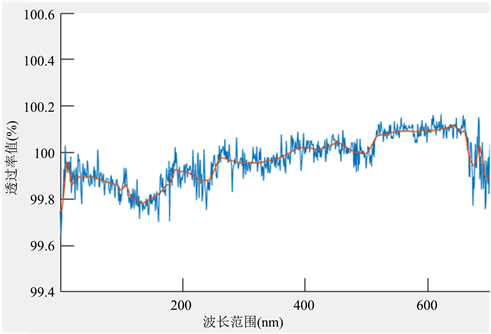
Figure 3. De-noising comparison diagram of S-G algorithm
图3. S-G算法的去噪对比图
3) 台阶去除
如图4所示,为零线台阶图以及样品图谱去除台阶前后的对比图,紫色曲线为在没有光照的情况下测得的透过率值,蓝色曲线为没有去除台阶之前测得的样品透过率值,红色曲线为去除台阶之后的样品透过率值,可明显看到所测得的透过率值偏高,去除之后透过率值降低,提高了准确度。

Figure 4. Zero-line step removal contrast chart
图4. 零线台阶去除对比图
如图5所示,图谱为860 nm处台阶去除对比图,蓝色曲线为原始图谱,台阶造成了860 nm之后的透过率值偏低,红色曲线是经过算法处理后图谱,可观察到台阶被去除后提高了透过率的准确度。

Figure 5. 860 nm step removal comparison diagram
图5. 860 nm台阶去除对比图
5. 结论
本文对影响单光束分光光度计的测量误差的因素做出了分析,包括波长的准确度、光度噪声、暗电流及接收器等因素。通过误差分析后提出了最小二乘法矩阵拟合、S-G算法、系数补偿的修正方法。实验结果表明:经过最小二乘法矩阵拟合算法使波长误差范围从±2 nm提高到±1 nm;光谱曲线在经过S-G算法处理后,曲线变得更加平滑,且不改变曲线趋势;光谱台阶通过系数弥补之后,消除了因台阶问题而造成的测量误差,提高了单光束分光光度计的测量精度。
参考文献