1. 引言
海上搜寻是海难事故发生后减少人命财产损失的一道重要防线,它是一种涉及多目标探测、受环境影响较大、流程复杂、多单位协同配合的任务。事故一旦发生,如何快速有效的利用搜寻资源、制定出最优的搜寻方案,开展救援行动,直接关系着被救人员的生死存亡和直接经济损失。此外,基于真实场景的海上搜寻演习需要消耗大量的人力、物力及财力,因此,需要计算机辅助软件能够根据海难发生地点的海况、遇险目标的自身情况,同时考虑现有的可用搜索资源信息,快速有效地规划出救援计划,并对救援方案进行仿真。这样既节省了宝贵的搜寻时间,又能够使搜索资源得到最优的分配,使目标被成功搜索的概率达到最大。
国外一些学者和机构对海上搜寻较早的开展了研究。国外学者J.R. Frost和L.D. Stone [1] 对早期搜寻理论做了简单介绍;BREIVIK [2] 等分析得出了风压差和风速的关系,挪威气象局基于此得出了针对海上油污和船舶的漂移模型;WANG [3] 等考虑不同漂浮物的形状,描述了形状特征与随机运动的关系,提供了海上漂浮物漂移速度的评估精度。
国内的相关机构在近年来增加了对海上搜寻的相关研究。陈明东 [4] 对海上搜寻的方式方法以及搜寻计划做了比较详细的研究,但是对海上气象因素如漂移风、流等未做深入研究;夏宇亮 [5] 考虑了气象海洋因素,将风生流融合入水场流,通过引用蒙特卡洛模型进行了场计算;刘广强 [6] 详细阐述了扫海宽度的概念,对不同载荷的搜救能力进行了评估;于卫红 [7] 提出了洋面模式下根据最后已知的位置报告及风流信息,确定搜寻目标漂移后的搜寻区域的具体方法;胡志斌 [8] 通过海洋气象因素等对搜寻目标的影响,预测搜寻基准,并考虑相关误差,建立搜寻区域确定模型;姜华林 [9] 引入蒙特卡洛方法,通过量化影响漂移的不确定性因素,确定漂浮物位置随时间变化的概率密度函数,建立了搜寻区域确定模型。
国内目前关于海上搜寻方案的理论基础和相对独立的辅助软件已经比较成熟,然而缺少将搜寻方案制定、搜寻任务规划和搜寻资源能力评估相结合的相关研究和仿真软件。本文基于已有的理论基础和数学模型,通过制定新的仿真业务流程、考虑真实海洋气象因素、结合实际情况进行搜寻设备约束限制,实现一套海上搜寻任务规划与资源配置仿真系统,可以对不同搜救设备独立或同时参与搜救任务给出不同的规划路径,智能选择最优方案,并对搜寻结果进行评估,很大程度上提高了海上搜救任务的搜寻效率,为海上搜救完整方案的制定提供智能化的基础。
2. 海上搜寻理论基础
海上搜寻的理论基础来自于搜索理论,搜索理论研究的是在搜寻资源有限的前提下,如何有效利用资源,以最优的方式找到一个所处位置不确定的搜寻目标。海上搜寻问题属于概率问题,涉及到包含概率和发现概率两个部分,即:
式中,POC表示包含概率,即物体处于搜索区域中的概率;POD表示发现概率,即当确定物体处于搜寻区域中时,最终发现物体的概率。
包含概率是用来衡量待搜寻目标处于搜寻区域可能性的指标,当区域足够大,大到把目标所有可能存在的海域都划为搜寻区域是,包含概率可以达到100%。发现概率是对在搜寻行动中搜寻人员或者设备表现进行评价的指标,也是对搜寻区域被搜寻彻底程度进行衡量的指标。
该章节主要介绍海上搜寻的一般过程以及利用计算机辅助救援规划所用到的算法和数学模型。
2.1. 海上搜寻过程概述
当发生海难事故时,救援中心首先接收到遇险求救信号。根据收到的信号位置,和当时的海洋环境,通过计算机辅助系统可以进行救援规划。
首先估算基准,即确定遇险事件的位置以及风和流对幸存者的影响。遇险位置根据获得的遇险地点准确度,一般分为大概位置、位置线和位置区域。然后,在遇险位置估计误差、搜寻单位的航行误差和漂移计算误差的基础上确定搜寻区域的位置和面积。搜寻区域的确定一般通过解析法或者蒙特卡洛法来计算完成。根据搜寻单位的能力、搜寻区域的形状和大小选择适当的搜寻方式;考虑到扫视宽度、搜寻线间距和发现概率,确定搜寻区域的覆盖;最后,基于可用搜寻力量和当时的环境的实际情况得出一个最佳的可行计划。
2.2. 海上搜寻过程概述
当发生海难事故时,救援中心首先接收到遇险求救信号。根据收到的信号位置,和当时的海洋环境,通过计算机辅助系统可以进行救援规划。
首先估算基准,即确定遇险事件的位置以及风和流对幸存者的影响。遇险位置根据获得的遇险地点准确度,一般分为大概位置、位置线和位置区域。然后,在遇险位置估计误差、搜寻单位的航行误差和漂移计算误差的基础上确定搜寻区域的位置和面积。搜寻区域的确定一般通过解析法或者蒙特卡洛法来计算完成。根据搜寻单位的能力、搜寻区域的形状和大小选择适当的搜寻方式;考虑到扫视宽度、搜寻线间距和发现概率,确定搜寻区域的覆盖;最后,基于可用搜寻力量和当时的环境的实际情况得出一个最佳的可行计划。
2.3. 包含概率相关因素
根据海上搜寻的相关理论,包含概率是获得搜寻成功率的重要组成部分。包含概率中需要计算将遇险人员位置包含在内的搜寻区域面积和位置。在早期,求解待搜寻目标所在区域一般使用解析法,后来随着计算机仿真技术的成熟应用,蒙特卡洛法越来越多被使用。通过这两种方法都能求解出目标大致所在的海域,从而计算出包含概率等重要信息。
2.3.1. 解析法估算搜寻区域
解析法是一种计算搜寻区域的传统方法,其基本原理如下:将漂浮物存在的可能区域看成是以基准点为中心的一个几何区域,基准点会随着所在区域的风、流变化而移动,海上搜寻中将此种移动称之为漂移。其漂移轨迹表现为一条与时间相关的曲线或折线,通过对轨迹的预测最终求解出物体存在的海域。具体步骤如下:
1) 首先定义漂浮物的初始位置作为基准点O;
2) 计算风压差和流压差,并进行矢量叠加作为物体的漂移速度,根据漂移时间推算出漂浮物相对于基准点O的位移,得出搜寻基准点O’;
3) 物体漂流轨迹与风压差和(总水)流压差有关。总水流又是根据海流(SC)和风生流(WC)矢量合成得到的。在计算海流的过程中,经常取一年内的观测平均值作为海流的矢量合成;风生流的产生是因为海面风作用在海面上的持续力而产生的,所以风生流对海面风场的实时数据具有严格的要求,通常以搜索行动最近两天(48小时)的海面风场数据作为参考,在总体时间中根据实际情况可以分为若干个(n个)报告时间组;
4) 有了海流、风生流和风压差的数值,就可以确定目标漂移运动的基准点O’。最常用的目标漂移运动的基准点的确定方法是标绘法见图1。
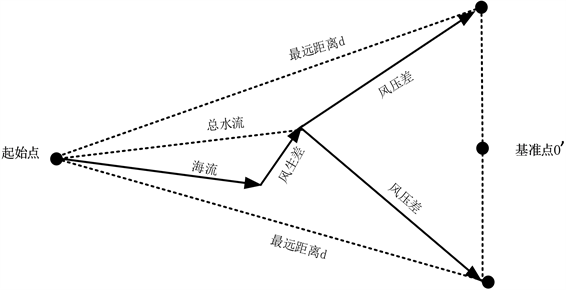
Figure 1. The relation between drift track, wind pressure difference and flow pressure difference
图1. 漂移轨迹与风压差和流压差的关系
计算漂移过程中产生的误差,包括风向误差、风速误差和压载状况误差等。
风向误差的大小与风向误差的角度、风速及距离基准点的时间跨度有关,一般认为满足以下经验关系:
风速误差
和载压误差B。
为拖曳系数,同一物体在使用海锚时和不使用海锚时的拖曳系数值差别很大。
根据风致漂移误差确定椭圆型的搜寻基准区域,并计算椭圆区域内漂浮物的位置关于长、短轴的概率分布。
搜索区域是进行搜索行动的主要参考区域。假设基准区域形状为椭圆形,其长轴和短轴分别为
和
。椭圆的长轴与风向一致,短轴垂直于风向。基准椭圆形区域可以表示为:
其中,
、
分别代表
、
的半轴长度,
代表风向与风致漂移速度的夹角。基准区域形状如图2。
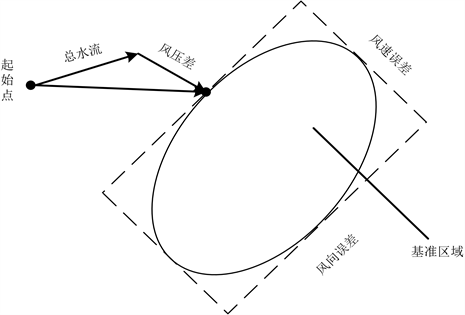
Figure 2. The determination of ellipse search area
图2. 椭圆搜索区域确定
2.3.2. 蒙特卡洛法估算搜寻区域
蒙特卡洛(Monte Carlo)法是将漂浮物体看成是单个粒子,粒子的漂移轨迹是一个随机过程。对漂移物体从一个位置向下一个位置的运动概率进行建模,并且大量复制运动过程互不相关的这种粒子,使它们在同样的规则下运动。在经过一段时间互不相关的运动后,可以得到漂移物体运动概率分布区域。
在建模过程中,我们只需要考虑物体的速度场,温度和盐度场暂时忽略。将海面网格化,每一格的速度定义在网格的边界上。
任一粒子在t时刻在网格中的坐标定义为
,进而定义
,
表示粒子所在网络的坐标。
平流运动可以看做恒定的能够被量化的风、流作用,用
表示。随机运动可以看作是Wiener过程
。在随机过程论中,可以证明Wiener过程是一个正态过程,实际中可以根据需要选择其他类型的随机过程。
假设随机运动与平流运动过程互相独立,可以叠加,以考察其在x方向的位移为例,有:
其中,代表服从参数为(0, 1)的标准正态分布单位向量,B代表随机力场。德国的Frank Wolk将上式做了些调整,应用于数值模拟,同一粒子前后位置间有如下关系:
其中,
和
为互不相关的标准正态分布函数,
为数值模式中时间步长,其中
可以近似的表示为
,
,
、
、
、
为风、流的拖曳系数,其取值与漂浮物的属性有关的统计试验得到。
2.4. 发现概率相关因素
在确定好将要搜寻的区域后,搜寻行动下一步就是投入搜寻资源。提高搜寻成功率可以从两点着手:一是增加投入的搜寻资源数量,二是提高搜寻行动的效率。发现概率的增大有利于提高搜寻行动的准确性,它的大小受到扫海宽度、搜寻努力程度和覆盖率等一系列因素的共同影响。
2.4.1. 扫海宽度
扫海宽度的大小受到搜寻资源搜寻能力、漂移目标自身的特征和搜寻进行时海域自然条件的影响,这些因素对扫海宽度产生直接影响,并间接影响着发现概率。
在几何意义上说,扫海宽度定义如图3所示。图中曲线被称为横距曲线,他是在分析大量实验数据和真实搜寻案例的基础上统计分析后绘出的,该图横轴表示搜寻路线左右侧向距离,正数表示探测装置右侧的侧向距离,负数表示左侧的侧向距离,纵轴表示发现概率。扫海宽度定义为:随着侧向距离增加,探测器的探测能力下降,当侧向距离正好处于某一特定数值时,横距曲线下方的面积与上方的面积相等,即A区域与B区域面积相等,则这一特定数值等于该探测器在该条件下的扫海宽度。
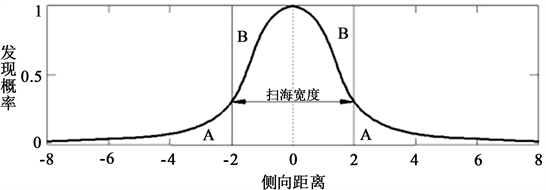
Figure 3. The determination of searching width
图3. 确定扫海宽度
2.4.2. 搜寻努力度
搜寻努力程度是对搜寻资源投入情况的一种衡量方式,由于搜寻资源种类各不相同,因此搜寻努力程度的衡量方式也不相同。一般情况下搜寻努力程度可以表示为:搜寻单元进行搜寻时在搜寻区域内移动距离的总和。搜寻努力程度在数值上等于搜寻单元在搜寻区域内话费的时间,即有效搜寻时间与搜寻时搜寻单元平均速度的乘积。
由于以此搜寻行动中通常是由多人或者多艘船舶和多架飞机协同搜寻,因此总的搜寻努力程度应当是参与搜寻的人员相应人数或飞机、船舶数目与每个搜寻单元努力程度的乘积。
2.4.3. 覆盖率
覆盖率是对被搜寻海域搜寻或覆盖彻底性的相对度量。覆盖率是有效扫视区域面积与已完成搜寻的搜寻区域面积的比值,是一个无量纲常数。
式中,
表示有效扫视区域,A表示已完成搜寻的搜寻区域,E表示搜寻努力程度,W表示扫海宽度,S表示航线间距。从式中可以得出,在理想条件下,当搜寻单位的航线严格按照平行线扫视搜寻进行规划时,即所有航线间距相等且相互平行,此时覆盖率等于扫海宽度与航线间距的比值。
3. 海上搜寻规划与资源配置仿真设计
在海上搜寻行动过程中,不仅需要专业的搜寻设备,更重要的是应用快速、准确的海上救援计算辅助系统指导救援行动。基于这样的需求,本文进行海上搜寻规划与资源配置的仿真设计与实现,有效地将搜寻资源最大限度地应用到搜寻任务中,使资源配置最优化,使搜寻行动的成功概率最大化。
3.1. 系统框架图
海上搜寻规划与资源配置的仿真系统总体架构分为四层:资源支撑层、服务层、业务层和展示层。其中,资源支撑层提供网络资源、数据库和服务器。服务层主要是通过各种模型组件、算法组件、工具组件等提供业务层所需要的服务组件。业务层主要是通过相关业务组件控制实现海上救援业务流程,包括海上搜寻和搜寻演习两种模式。展示层则提供2D/3D界面显示以及动画演示,给用户更直观、生动的海上救援仿真过程。系统总体方案如图4所示:

Figure 4. The overall architecture diagram of searching system
图4. 搜寻系统总体架构图
3.2. 系统框架图
图5为海上搜寻任务仿真流程图,具体步骤如下:
1) 进行相关约束条件设置;
2) 接收救助信号后,评估遇险情况,获取遇险时海况和风况数据;
3) 估算遇险位置和该位置的或然误差,计算基点位置;
4) 根据基点位置和相关误差参数计算搜寻区域;
5) 进行资源配置和任务规划,使救援效率最大化;
6) 确定搜寻分区和搜寻方式;
7) 开始执行搜寻,设置结束条件(如时间约束、天气约束等);
8) 根据上述搜寻过程进行相关的数学模型建立和仿真任务流程的建立。具体仿真实现界面如下所示。
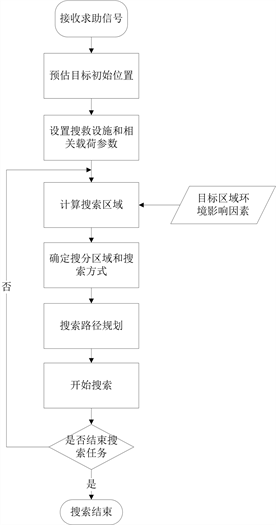
Figure 5. The flowchart of searching task and resource allocation
图5. 海上搜寻任务及资源配置流程图
3.2.1. 基点位置分析
建立基点位置分析模块,该模块用来根据求救信号发出位置和当时的海况,计算分析基点位置。在仿真过程中需要输出的参数包括落点的位置,风向、风速、海流方向、海流速度、风生流、风压差等。界面如图6所示:
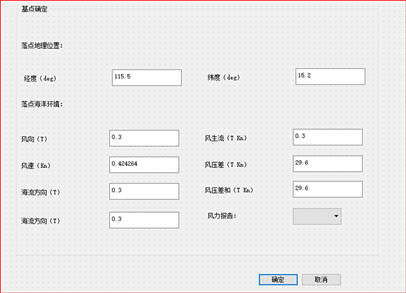
Figure 6. The interface of environment parameters setting
图6. 环境参数设置界面
3.2.2. 搜索区域计算
建立搜索区域分析模块。根据基点位置和相关漂移、海流、风压等误差,计算出搜索区域。界面如图7所示:

Figure 7. The interface of searching areas parameter setting
图7. 搜索区域参数设置界面
3.2.3. 资源配置
建立搜寻资源配置模块。如图8所示,该模块用来设定用于本次搜寻的搜寻资源,通过模型不同组合的配置,以及模型参数如飞行速度、扫海宽度、搜索方式等的设定,用来仿真不同类型搜寻资源的搜寻能力。
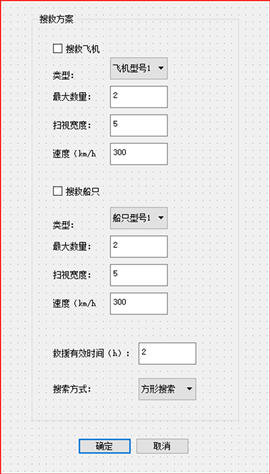
Figure 8. The interface of searching resource allocation parameter setting
图8. 搜寻资源参数设置界面
3.2.4. 搜寻方案解析
根据设定的搜寻资源数量和能力,进行搜寻过程的仿真。通过对不同方案时间的对比,可以确定仿真最优方案。
最后,海上搜寻规划任务的整体态势可以通过二维和三维动画演示进行全过程展示,为搜寻过程和决策提供了更直观的依据。图9和图10为仿真态势演示。

Figure 9. The display of searching area and path planning
图9. 搜寻区域与路径规划展示
4. 结论
本文介绍了海上搜寻规划任务的经典流程和相关数学模型,并利用已有平台进行了搜寻过程仿真实现。海上搜寻任务规划设计中涉及到的算法、数据库种类多、模型较为复杂,目前的仿真未考虑搭载不同载荷(如光电、红外、雷达等)后的搜索能力,后续将会优化算法,增加仿真模型,提高仿真过程的智能性与准确性。
NOTES
*通讯作者。