1. 引言
随着计算机技术和电子技术等的进步,虚拟仪器技术发展迅速,已被广泛应用于航空、航天、自动化、通信、电子等领域 [1] 。虚拟仪器技术是一门应用性、实践性、工程性很强的专业课 [2] [3] ,通过学习可掌握虚拟仪器系统设计方法和技能。
江苏省发布的《江苏省“十四五”制造业高质量发展规划(2021~2025年)》提出的16个先进制造业集群,其中包括智能制造装备和工业软件。现代工业对自动化的运动控制要求越来越高。运动控制系统通过对电机的控制,来实现对机械运动部件位移、速度、转矩等进行实时的控制管理,使其按照预先设定的轨迹和参数进行运动以满足生产应用的需要。三轴运动平台是工业领域常用的运动系统之一,在此基础上探讨运动控制和机器人领域的教育,可提升学生综合素养和工程关联力,以适应新经济生产的要求。
针对新工科背景下工程创新人才的培养,很多高校都尝试突破原有教学及项目的局限,在传统实验的运动控制实训之外引入机器人控制先进技术,将其改革为综合性的创新工程项目教学 [4] 。
为使课程实践环节与企业工程实践结合紧密,对虚拟仪器技术课程实践项目进行设计,避免实践项目功能单一、系统性不强等问题。项目利用LabVIEW、雷赛运动控制卡和相应硬件执行设备解决运动控制中的实际问题,可为进一步学习相关专业课程和从事相关工作奠定基础。项目具体实施采用边讲边做、理实结合的教学模式,避免实践过程监控不够的现象。
以下从实践项目的要求、目的、硬件平台、软件设计及项目实施与考核展开详细说明。
2. 运动平台应用实践项目要求与目的
课程组组通过讨论,设计提出基于LabVIEW与雷赛DMC2410三轴运动平台应用实践项目。
2.1. 项目要求
1) 按雷赛DMC2410运动控制卡说明书中电路连接规范,了解电机丝杠运动平台的组成与搭建过程。
2) 安装雷赛DMC2410DLL驱动库,学习DLL中DMC2410不同的运动控制方式及其对应和库函数,以及学习LabVIEW调用DLL的方法。
3) 分析常用LabVIEW的程序架构,学习面向运动控制选取合理LabVIEW程序架构,设计良好交互性的人机HMI界面。
4) 在此基础上,创造性地设计运动参数或轨迹参数的生成方式、不同运动行为的控制,并将其封装为子VI,为运动平台的后续使用提供具有规范接口的子VI [5] [6] [7] 。
2.2. 项目目的
1) 了解步进电机的特性及使用方法,学会通过电机驱动实现有效的运动动力输出,学会通过运动控制卡实现对运动方向、速度、距离的控制程序设计;
2) 掌握运动控制卡功效、特性及使用方法,学会通过运动控制卡的DLL函数实现运动控制;
3) 掌握LabVIEW动态界面设计技巧、DLL库函数使用,拓展学生的实践应用眼界;
4) 进一步理解和掌握LabVIEW的编程框架及其程序设计方法。
3. 实践项目设计
3.1. 硬件平台构建
软硬件平台选用我校NI联合实验室的步进电机3轴丝杠运动平台、研华IPC-610L工控机、雷赛DMC2410四轴运动控制卡、DM542电机驱动器、LabVIEW软件。硬件平台如图1所示。
1) 主控计算机
选用研华IPC-610L工控机,它具有全钢19寸4U标准上架4底板,14槽工业标准无源底板 PCA-6114P4-C,主板提供多个PCI、ISA总线。
2) 雷赛DMC2410运动控制卡
雷赛公司DMC2410运动控制卡是一款PCI总线的4轴运动控制卡,它可以控制步进电机、伺服电机。DMC2410有多种运动控制信号,包括四轴脉冲和方向控制、伺服控制、编码器、机械限位与原点、手轮脉冲及通用输入输出信号等 [5] 。
3) 步进电机驱动器
细分型两相混合式步进电机驱动器DM542采用直流18~50 V供电,通过脉冲控制电机转速。DM542通过接口PUL+、PUL−、DIR+、DIR−接收DMC2410输出控制信号控制电机按指定速度转动、停止、变速等。直流24 V接口A+、A−、B+和B−连接开关电源为电机提供运动能量。
4) 步进电机与其他
采用57系列的两相步进电机,型号分别为57HB76L4-30DA、57HB115L4-42DA。DMC2410通过PCI接口插在工控机主板上,并通过一个外置68Pin接线板SCSI68CN与外部步进电机驱动器DM542、限位开关等相连。24 V直流电源型号为LRS-350。丝杠螺距5 mm/圈。
3.2. 实践项目软件设计
1) 系统组成逻辑
运动控制软硬件之间逻辑关系如图2所示,工业上运动控制一般都采用这一结构 [8] [9] [10] 。首先,工控机上LabVIEW调用DMC2410的DLL函数,再通过驱动程序操控运动控制卡,实现运动参数设置、运动信息与状态的读取、运动执行以及限位、急停等实际动作。
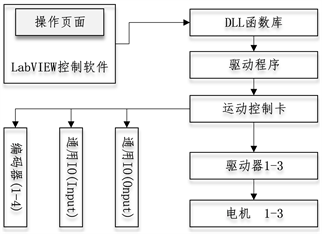
Figure 2. System hardware/software composition logic
图2. 系统软硬件组成逻辑
2) DMC2410库函数与调用方法
以0号轴为例,几个DMC2410运动控制的函数原型及其代码,其他轴的函数原型与其一致。
d2410_set_pulse_outmode (0,0)点位运动控制,设置脉冲输出模式。
d2410_config_home_mode(0,0,1)设置回原点方式。
d2410_set_profile(0,500,6000,0.02,0.01)设定梯形速度曲线:起始速度为500脉冲/秒、运行速度为6000脉冲/秒、加速时间为0.02秒、减速时间为0.01秒。
d2410_home_move(0,1,1);回原点运动:第2位为1正方向回原点;第3位为1高速回原点,遇原点信号,减速后停止。
熟悉DMC2410库内各个函数的原型后,用LabVIEW“调用库函数节点”调用。双击该节点进入调用库函数的配置界面,选择DMC2410DLL库和库内所需具体函数,再按函数原型配置函数的输入/输出及其数据类型。以d2410_set_profile( )函数为例,配置后该节点如图3(c)所示。可以进一步按子VI形式将其封装成与一般LabVIEW函数节点的形式,如图3(b)所示。

Figure 3. DLL function call and encapsulation of LabVIEW
图3. LabVIEW的DLL函数调用和封装
3) 软件框架设计
项目软件上采用LabVIEW的QMH (Queue Message Handle)消息队列框架,采用生产者消费者模式实现。
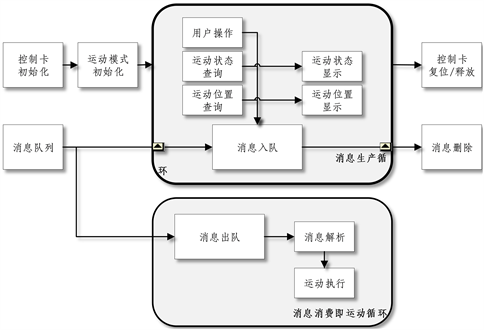
Figure 4. QMH message queue framework
图4. QMH消息队列框架
如图4所示,消息队列内元素的数据类型是簇,簇中包含运动命令、轴号、方向、运动方式、运动距离、运动速度、加速/减速时间、速度曲线形式、轴运动状态、限位开关状态、急停开关状态等。具体封装进簇内的参数按照学生选题的具体要求适当增减。
生产者循环中监视用户操作和运动控制卡状态参数并将其插入队列。消费者循环中,消息出队后对消息内参数解析与判断,进而驱动运动执行。
4. 实践项目实施过程及考核
4.1. 实施过程
由于项目属于虚拟仪器技术与应用中一个实践环节,涉及有多个硬件模块、多个知识点,因此在实践项目实施过程中采用的是边讲边练、理实一体化的教学模式。
课程在实验室中开展,项目涉及的任务、知识与问题,及所培养的能力如图5所示,图中有实施过程的任务分解,及各环节所占的分值。熟悉实践项目要求和熟悉硬件等内容的考核是通过问答形式完成,其他的考核项则通过实际运行效果的演示来完成。
项目实施过程中,学生要了解所涉及的硬件平台组成;掌握步进电机的结构、原理、驱动;运动控制卡安装、步进电机、驱动器、限位开关等硬件的接线;DLL调用方法以及步进电机运行、速度及方向控制等参数控制;QMH及生产者/消费者架构的使用。课时为8~10课时,以团队协作形式开展,每个团队2~3人。实践项目考核采用线下问答和运行效果演示的方式考核。项目实施的整个过程需要学生与教师充分互动。
4.2. 考核方式
软硬件方案论证主要考核学生给出方案的合理性、可实施性、可拓展性;硬件接线及模块测试考核学生接线、走线的规范性及硬件模块测试过程是否合理;软件设计和调试运行考核系统是否能按要求正常运行、程序是否存在漏洞及程序设计的规范性;对于项目完成度,最终学生需提交项目过程记录表,即对项目要求、方案、硬件设计、软件设计、调试等给出书面报告。
项目提供部分运动控制的程序和文件供学生参考、学习和模仿,可以进一步体会和掌握运动控制过程中软件高速运行与硬件相对慢速运行的客观事实,理解程序的本质,进而设计合理的程序框架加以实现。例如图6给出示的学生完成和封装的点位运动和连续运动的VI例程。通过此例程,掌握DLL调用、并行执行、轴运动参数设置和位置检测等知识要点。
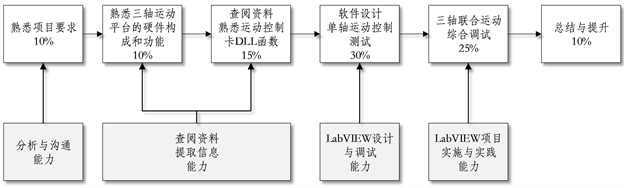
Figure 5. Implementation diagram of the three-axis movement platform practice project
图5. 三轴运动平台实践项目实施图
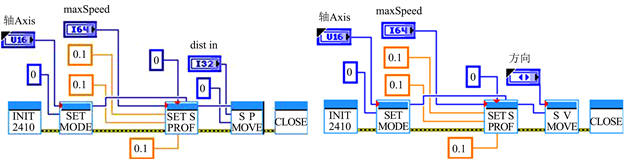
Figure 6. LabVIEW program for point motion and continuous motion
图6. 点位运动和连续运动的LabVIEW程序
4.3. 实践成果
运动平台与LabVIEW相结合实践项目的构建和开展至今,我校NI联合实验室已为学校创新教育基地。在此基础上学生创新实践能力培养取得了较好的成果。申报或完成大学生创新创业训练项目多项,学科竞赛项目多项。部分成果如表1所示:

Table 1. Results achieved by the project
表1. 项目成果
5. 结束语
运动控制平台实践项目的知识点多、综合性强,涉及电机丝杠、电机驱动器、低压电源、运动控制卡和LabVIEW库函数访问、程序架构等软硬件,这些都是企业项目中经常会使用到的,在锻炼学生实践动手能力的同时能很好地满足企业相关人才的需求。
基金项目
江苏省现代教育技术研究2022年度立项课题(2022-R-99967);江苏省大型工程装备检测与控制重点建设实验室开放基金项目(JSKLEDC201414)。
参考文献
NOTES
*通讯作者。