1. 引言
微操作是指以微米或纳米级的精度随尺寸极小的物体进行稳定定位、抓取、转移和装配的技术 [1] [2] ,随着高新技术的发展和对宏观世界的研究相对成熟,微操作开始成为研究热点并被广泛应用到微机电系统(MEMS) [3] 、生物医学 [4] 和精密医疗器械 [5] 等领域。
微夹持器是高精度显微操作任务中的重要工具,它直接影响显微操作的质量和效率,面向机械微夹持器的控制器设计大多集中在自动化微操作系统,文献 [6] 采用系统辨识器二指压电驱动微夹持器建立动力学模型,并采用增量式PID控制策略提高压电驱动器的响应速度,文献 [7] 对二指微纤维复合微夹持器提出了一种基于模糊滑模控制和比例积分控制器的位置/力混合控制方案,完成精确和多尺度的微操作任务,文献 [8] 采用阻抗控制来解决二指V型电热驱动器自身的延时特性,提高其显微操作的柔顺性。上述自动化系统通常面向二指机械微夹持器,在显微镜下获取双指末端在空间中的位置坐标,实现平面的夹持操作。本文所研究的多自由度多指电热驱动微夹持器属于空间夹持器 [9] ,受限于传统的传感器技术和视觉技术,无法完全获取微夹持器多指的末端坐标,这使得自动化系统的设计方法非常困难,并且通常只能完成分配的简单任务或批量的重复操作,如夹持、搬运等,极大限制了电热微夹持器的空间操作性能。与自动化系统相比,遥操作技术可将宏观操作转化为微观操作 [10] [11] ,以人的意愿作为系统的控制指令,适用于完成复杂任务,目前,遥操作技术在微观领域应用还比较少。
本文以课题组研发的多自由度多指电热驱动微夹持器作为研究对象,搭建了遥操作系统,充分发挥多指微夹持器的空间操作能力,使其在操作微物体过程中如同人手抓握物体一样便捷、灵活,设计了一个用于人手穿戴的外骨骼手来获取主端操作信息,并使用位置空间算法来实现主从操作器的动作缩放,在此基础上设计了引入PID闭环控制方法来提高电热驱动器的响应速度,并进行仿真分析。
2. 遥操作系统结构
遥操作系统搭建如图1所示。操作员为主端的控制驱动器,佩戴外骨骼手并弯曲手指,带动外骨骼连杆运动,内嵌于外骨骼内部的角度传感器能够实时采集关节运动信息,该信息作为系统的输入信号经过STM32控制器的处理、计算和位置映射,然后将控制信号输出到计算机。通过LabView软件的SPIC (Standard Commands for Programmable Instruments)指令与直流电源进行通讯,以完成主端到从端的信息传输。当电源接收到控制信号后,它将启动并将热量传递给电热微夹持器。微夹持器表面附着有聚酰亚胺电热膜,用于将电信号转换为热能,为微夹持器提供所需的动力,从而微夹持器产生运动和力作用到微物体完成微操作任务。整个操作过程由倒置显微镜记录,并由计算机采集反馈信息供操作员参考。

Figure 1. Structure of teleoperation system
图1. 遥操作系统结构图
3. 主从手结构设计与分析
3.1. 主从手运动学建模
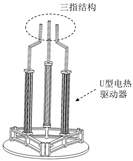
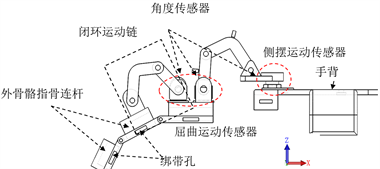
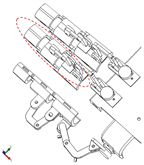
可穿戴外骨骼手直接作用于人手,使得在操作微小物体时更符合人手抓取宏观物体的习惯,从而增强了交互感和便捷性 [12] 。可穿戴外骨骼手的三维结构图如图2(a)所示,它采用了三指的结构,其中食指、拇指和中指具有相同的运动形式,仅尺寸有所不同。图2(b)展示了食指的平面投影结构图,核心构件是一个闭环运动链,连杆与手指形成了一个四连杆机构,并且杆的长度满足双摇杆机构的条件,即最长杆长度与最短杆长度之和大于其余两杆长度之和,闭环运动链内嵌了三个角度传感器,用于测量手指的弯曲和摆动运动,这些传感器的运动轴心与手指关节的运动轴心平行,这些传感器的运动轴心与手指关节的运动轴心平行。由于远端指关节的运动角度与近端指关节的运动角度成比例关系,即
,为了简化外骨骼结构和尺寸,省略了测量远端指关节运动的传感器。外骨骼的指骨连杆通过绑带固定在人手手指上,可适应不同操作员的手指尺寸。
从手微夹持器含有三根完全相同的电热手指,其末端在空间中呈正三角形排列,每根手指具有三个自由度,包括两个转动自由度和一个平移自由度,如图2(c)所示。主从手的单指建模图如图3所示,主手和从手的基座标定义方向相同,在遥操作时更符合人手日常习惯,并应用改进的DH法建立主手的连杆坐标系。
 (a) (b) (c)
(a) (b) (c)
Figure 2. (a) The 3D structure of the wearable exoskeleton hand; (b) X-Z plane view of the index finger of the exoskeleton; (c) The 3D structure of electrothermal microgripper
图2. (a) 可穿戴外骨骼手的三维结构图;(b) 外骨骼食指的X-Z平面视图;(c) 电热微夹持器的三维结构图
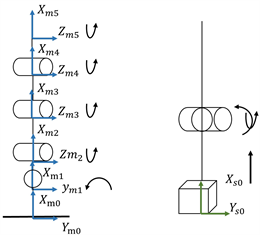
Figure 3. Model of single finger of the master exoskeleton hand (left) and model of single finger of the microgripper (right)
图3. 主外骨骼手单指的模型图和从外骨骼手单指的模型图
3.2. 主从手工作空间分析
本文采用改进的DH法进行外骨骼手指运动学分析,与标准DH法不同,改进的DH方法将连杆的坐标系建立在连杆的首端,并按照以下顺序进行坐标系变换:首先绕着
轴旋转和平移,再绕着的
轴进行旋转和平移,连杆i相对于连杆
的变换矩阵可表示为:
(1)
其中
,沿着
,从
移动到
的距离;
,绕着
,从
旋转到
的距离;
,沿着
,从
移动到
的距离;
,绕着
,从
旋转到
的距离;外骨骼手指末端{5}相对于基坐标{0}的变换矩阵可表示为:
(2)
(3)
(4)
(5)
(6)
(7)
(8)
其中
,
,
,
是外骨骼手根部到指尖关节的转动角度,
是外骨骼手从根部到指尖的指骨长度。
常见的工作空间分析方法有图解法、解析法和数值法,其中数值法计算速度快、简单,并且无需复杂的数学推导,特别适用于关节型机械臂的工作空间求解。蒙特卡洛法是经典的数值法之一,它利用随机抽样来解决数学问题。
本文采用蒙特卡洛法求解外骨骼手指的运动空间,通过MATLAB软件工具箱,在区间[0, 1]内随机采样100,000个角度运动自变量,并将它们带入运动学方程公式(6)、(7)、(8)求出末端在三维空间中的坐标点,所得的点云图如图4所示,采用SerialLink函数构建外骨骼手的连杆模型。外骨骼食指末端在X、Y、Z方向上的运动范围如图4所示,微夹持器的末端位移由先前的工作得到 [9] 。主从操作手在X、Y、Z方向所能达到的最大工作范围如表1所示。
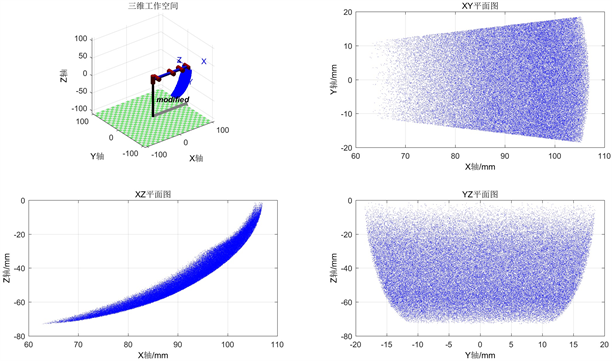
Figure 4. Workspace of the exoskeleton hand
图4. 外骨骼手的工作空间

Table 1. Motion range of the tip of the exoskeleton hand and microgripper
表1. 外骨骼手和微夹持器的末端运动范围
3.3. 基于工作空间的主从映射算法
笛卡尔空间映射方法通常用于解决主从异构式遥操作系统中主从端工作空间不匹配的问题,其基本原理是将主端操作手的运动按照适当的比例系数进行缩放,然后将其传递到从端操作手 [13] [14] ,这一映射过程依赖于主从操作手的构型、自由度数、DH连杆参数以及运动学方程等信息。映射由主从端最大工作范围确定,根据表1看出主从操作手在不同方向上的运动位移具有较大差异,为了实现主操作手最大程度地覆盖从操作手的运动范围,从而改善从机器人的可操作性,在X、Y、Z方向上采用不同的系数,映射算法设计如下:
(9)
(10)
(11)
其中,
,
,
分别是从操作手在X、Y、Z方向上的最大位置,
,
,
分别是主操作手在X、Y、Z方向上的最小位置,
,
,
分别是主操作手在笛卡尔空间的坐标位置,
,
,
分别是从操作手在笛卡尔空间的理想坐标位置。
4. 位置闭环控制策略设计
4.1. 电热微夹持器模型
现有的电热驱动器主要采用开环控制方法,抗干扰能力差,且动态响应时间长,约25秒才能达到稳定状态,严重制约了微操作的应用。因此本文采用PID闭环控制算法,通过进行根轨迹分析和频率特性分析来设置合适的参数,能够有效提高微操作的响应时间和精确性。
具有U型梁结构的电热驱动器,从输入电压到末端输出位移的关系可看作一个二阶系统,表示为
其中,
是输入电压值,
是末端位移,K、C、M均为驱动器综合系数,驱动器的材料、尺寸以及环境变量都有关系,难以直接求取,故采用MATLAB中的系统辨识工具箱,将测试电压数据和实际动态位移变化导入工具箱,经过辨识分析后,可以得到该电热驱动器的传递函数。辨识的精度达到95%表明该传递函数对实际系统的动态行为进行了较好的建模和拟合,辨识后的传递函数如下:
(12)
闭环传递函数为:
(13)
由特征方程求出极点:
(14)
令
得:
(15)
闭环传递函数具有两个极点且均小于0,在复平面表现在左半平面且有虚数存在,说明处于衰减振荡状态且最终稳定。该系统的自然频率
,阻尼比
,调节时间
,峰值时间
,超调量
,稳态值,由以下公式得出:
(16)
(17)
(18)
(19)
电热驱动器在阶跃信号输入下出现振荡、较长的调节时间和大超调量,为了改善系统性能,需要引入一个控制器来调节系统的响应,以便满足预期的效果。
4.2. 控制系统设计
遥微操作系统中的微夹持器直接应用于微小物体,需根据实际情况采用合适的控制策略,尤其是柔软的生物细胞,通常具有极小的尺寸、低刚度和易受损的特点,因此对其微操作过程中采用闭环控制至关重要。闭环控制策略需要满足以下特点:超调量不宜过大:过大的超调量可能导致对微小物体施加过大的力,引发不可逆的损伤,因此需要确保控制策略限制超调量,以减小对微小物体的力作用。振荡幅度较小或无振荡,以防止对微小物体的损害。在此基础上,为确保对微小物体的控制更加精确和渐进,可减少部分响应时间。主从遥微操作系统闭环控制图如图5所示。
是由主端操作手经笛卡尔坐标空间映射后得到的理想位置,
是从操作手的实际位置,且
。
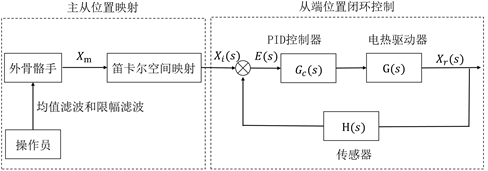
Figure 5. The control block diagram of the teleoperation system
图5. 遥操作系统控制框图
4.2.1. 主端信息滤波
在主端位置映射系统中,STM32单片机中的ADC功能用于采集手部运动信息并转换为数字信号供计算机处理,与机械臂相比,人手在运动过程中可能存在手部颤抖等干扰因素,因此,本文采用了一种结合平均值滤波和限幅滤波的方法来对主端信息进行筛选。平均值滤波即连续取N个采样值进行算术平均运算,N值较大时,信号平滑度较高,但对于快速变化的信号不够灵敏,N值较小时相反,一般来说选取
较为合适。限幅滤波的原理是确定两次采样允许的最大偏差值A,若本次采集值与上次采集值小于偏差值A则视为无效信息,否则为有效信息,能有效克服因偶然因素引起的脉冲干扰,从而提高信号的稳定性。
(20)
(21)
其中,
是平均值滤波所得的数字值,
是限幅滤波后所得的数字值,三目运算符用于判断输出结果,
和
分别是当前采样值和上一次采样值。
4.2.2. 超前调节
超前调节是一种利用超前特性提供的正相移来增加系统的相位裕度的控制策略,通常用于改进系统的稳定性和响应速度,尤其是应用于高性能控制场合。同时,它使系统的开环传递函数的根轨迹整体向左移动,从而扩大了开环增益的调节范围。超前调节的一般形式为:
(22)
相频特性
(23)
该系统中,
,
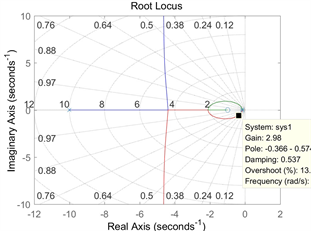
。从时域角度分析,图6(a)~(b)展示了经过超前校正前后的系统根轨迹图,可以明显看出,校正前的系统开环增益取值范围较小,这对于改善系统的响应速度不利。虽然系统处于稳定状态,但较大的开环增益会引起明显的振荡,无法满足微操作的应用需求。而校正后的系统具有更大的开环增益范围,振荡幅度减小,极点距离负实轴更近,从而系统的振荡也更小。从频域角度分析,图6(c)是校正前后的伯德图,校正后的系统相位裕度从之前的16.1 deg增加到了68.7 deg,有效增强了系统的动态性能和稳定性。此外,高频段的增益较低有助于减小噪声对系统的影响。
 (a) (b)
(a) (b) (c)
(c)
Figure 6. (a) Root trajectory plot of the microgripper model before calibration; (b) Root trajectory plot of the microgripper model after calibration; (c) Bode plots of microgripper model before and after calibration
图6. (a) 校正前微夹持器模型的根轨迹图;(b) 校正后微夹持器模型的根轨迹图;(c) 校正前后微夹持器模型的伯德图
4.2.3. PID控制算法
PID是经典的闭环控制方法,具有算法简单、鲁棒性能好和可靠性高的优点,被广泛应用到工业领域,它是由三个环节组成,比例P、积分I、微分D,其中比例环节可以提高响应速度减小稳态误差,但过大会导致引起系统不稳定,积分环节可以减小稳态误差设置消除稳态误差,过大易引起振荡,微分环节的作用是抑制振荡,比例和积分环节作用于误差,而微分环节作用于误差的变化率,PID控制的理论公式为:
(24)
经拉普拉斯变换后得到传递函数为:
(25)
其中,
(26)
在微夹持器的控制中,控制变量是微夹持器末端的实际输出位置与理想位置之间的误差,该误差会通过PID调节来进行校正,以将微夹持器移动到目标位置。结合实际应用选取合适的PID参数,电热驱动器采用AlSi10Mg材料制造,上面贴附聚酰亚胺电热膜用于将电能转化为热能。该电热膜具有最高温度的承受限制,如果运动误差过大,比例环节的输出可能会超过电热膜的承受能力,导致电热膜无法正常工作。因此,在仿真中引入Saturation Dynamic模块限制比例环节的输出,以确保输出不会超过电热膜的承受范围。约束条件为:
(27)
式27中比例调节的输出始终在输入信号的0.8倍以内。由MATLAB中Simulink模块搭建的仿真模型如图7所示。
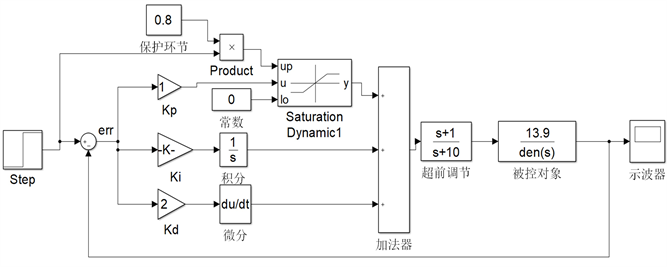
Figure 7. Block diagram of closed-loop position control for microgripper model
图7. 微夹持器模型的位置闭环控制框图
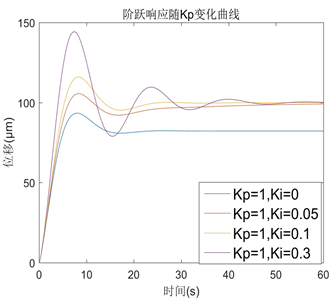
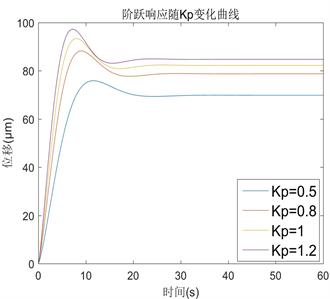
在实际应用中,通常外骨骼手运动到某一位置产生输入信号后,保持不动直到微夹持器到达理想位置外骨骼手再进行下一次的运动,这个过程类似于一个阶跃输入信号,因此下面对系统的阶跃响应进行分析,仿真时间为60 s,输入信号幅值为100。图8(a)显示
越大响应速度越快,当选取值过大时,操作柔软物体会有过冲,且输入电压达不到要求,当选取值过小时,会有很大的稳态误差,尽管通过积分环节可以改善但是积分也会引起系统不稳定,因此考虑到实际应用选取
,从图8(b)看出
或
均可满足要求,此处选取
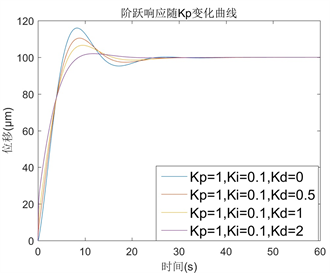
,为了使系统响应曲线稳步上升,选取
,如图8(c)。图8(d)为在PID调节下的阶跃响应曲线,系统振荡极小,末端的输出位置能够稳定地达到输入值。上升时间为5.6 s,调节时间为7.7 s,峰值时间为11.8 s,超调量为1.9%,稳定值为100,满足最初的设定条件,与开环控制相比,系统具有更小的超调量、更快的调节时间和更稳定的上升趋势,这表明控制器的使用显著提高了系统的性能。
 (a) (b)
(a) (b)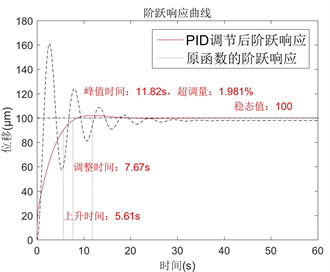
 (c) (d)
(c) (d)
Figure 8. (a) Curves of microgripper model step response versus Kp; (b) Curves of microgripper model step response versus Ki; (c) Curves of microgripper model step response versus Kd; (d) Comparison of the step response curves of the microgripper model before and after regulation by the PID algorithm
图8. (a) 微夹持器模型阶跃响应随Kp变化曲线;(b) 微夹持器模型阶跃响应随Ki变化曲线;(c) 微夹持器模型阶跃响应随Kd变化曲线;(d) 微夹持器模型经PID算法调节前后的阶跃响应曲线对比图
5. 结束语
本文以可穿戴外骨骼手作为主操作手、电热驱动微夹持器作为从操作手搭建了遥微操作系统,使得微夹持器在操作微物体时能够像人手抓取宏观物体一样灵活可控。设计的可穿戴外骨骼手能够适应不同操作员得手指尺寸,而且能够准确获取手指运动的全部信息,包括3个弯曲自由度和1个摆动自由度;采用改进的DH法进行运动学建模并推导其末端的运动范围,该运动范围用于设计位置映射算法以最大化的使从操作手复现主操作手的运动,为了获取较为稳定的输入信号,在STM32控制器采样时进行平均值滤波和幅值滤波,并采用空间映射算法得到主动端和从动端的位置对应关系,在此基础上,应用PID控制策略实现了电热微夹持器遥操作的闭环控制,提高了微操作的动态性能。通过本文研究验证了将遥操作技术应用在微观操作是可行的,遥操作有助于提高多指微夹持器的空间操作性能,使得在遥操作系统中由外骨骼手控制微夹持器执行微操作任务变得更加直观有效。