1. 引言
在近代轴承故障诊断的研究中,深度学习(Deep Learning, DL)是一种被广泛使用且有效的方法。这些方法通常将轴承的一维振动信号转化为二维图像,通过不同的编码方式,特征提取方法以及各种神经网络来实现分类,从而完成轴承的故障诊断。例如,一些文献使用双谱将振动信号 [1] 转换为图像,然后使用概率神经网络(Probabilistic Neural Networks, PNN)进行分类。还有文献 [2] 使用卷积神经网络(Convolutional Neural Network, CNN)来提取利用波叠加法处理的图像特征和进行故障分类。此外,还有采用压缩感知方法结合卷积深度置信网络(Convolutional Deep Belief Network, CDBN)的方法 [3] 。以及使用谱峭度图来编码振动数据,然后将特征图输入CNN中进行故障分类。传统的机械系统健康监测方法需要手动提取故障特征,在面对故障信息丰富多变、实际工况交替复杂时往往会导致诊断效果不理想和泛化性能欠佳的问题 [4] 。同样传统方法也有参考价值,例如,乔志城等 [5] 使用了经过改进的经验小波变换进行轴承故障的诊断。何勇等 [6] 优化遗传算法,优化后通过包络谱来进行轴承故障诊断。Saidi等 [7] [8] 通过经验模态处理初始的信号将信号分解优化为本征模态函数(Intrinsic Mode Function, IMF)进行故障诊断。
鉴于多类别轴承故障诊断测试准确率不高以及数据集扩充等问题,本研究引入了一种创新方法,即GAF-ICNN模型,结合了格拉姆角场(Gramian Angular Field, GAF)和改进卷积神经网络(Improved Convolutional Neural Network, ICNN)。首先将原一维始振动型号通过GAF进行编码,使其转换为二维特征图形且具有时间相关性,之后将获取到的特征图像用于GAF-ICNN模型,进行特征提取,通过相关函数最终实现故障类型的区分和诊断。我们通过对公开的凯斯西储大学轴承数据库进行实验,来验证所提出的GAF-ICNN模型的有效性,并在不同数据集规模和不同Mini-batch Size条件下进一步分析验证。此外,我们通过对模型的性能与现有的归一化方法进行比较。比较结果表明,本文所提出的GAF-ICNN模型具有更高的识别精度和泛化性能。这一研究为轴承故障诊断领域提供了一种有前景的方法,并在实验中展示了其在复杂条件下的鲁棒性和优越性。
2. 格拉姆角场(GAF)
卷积神经网络(CNN)作为一种能够有效分类图像的方法,若应用于轴承故障诊断,则要选择一种对轴承的一维振动信号向二维图像进行映射且能够保留一维信号中重要信息的编码方法,以实现轴承一维数据的处理 [9] 。GAF法保持了信号的时间依赖性,能够有效刻录一维数据中的特征信息。
GAF法是一种将一维数据向二维映射的方法。该方法提取的特征能够表示时间和频率的动态变化 ,原理如下:首先,将一维数据序列X中数值缩放至[−1, 1]或者[0, 1]之间,如下:
(1)
其次,将已缩放后的数据序列中数值作为夹角余弦值D (若上一步数值缩放至[−1, 1],则夹角范围为[0, p];若上一步数值缩放至[0.1],则夹角范围为[0, p]),设置时间戳为半径r,把一维数据转换到极坐标系统中,N为正则化极坐标系统生成空间的常数因子:
(2)
(3)
最后,通过对应作角度和(或)对应作角度差的方法实现对不同时间点的时间相关性进行识别,即格拉姆角和场(GASF)法和格拉姆角差场(GADF)法,如图所示,I为单位行向量。
(4)
(5)
(6)
(7)
每次采样x长度的数据序列,经过变换后,得到[x, x]的矩阵,生成x*x尺寸的图片。总的来说,两种方法都利用了傅里叶变换将时间序列数据转换为图像形式,但是GADF主要侧重于时间序列的分布特征,而GASF则更着重于捕捉时间和频率信息。选择哪种方法通常取决于应用需求以及对时间序列数据的关注点。GADF法相比于GASF法在测试中获得的准确率更高,故本文选用GADF法用于数据处理。
3. 二维数据集的构建
3.1. 实验数据集
本研究所使用的美国凯斯西储大学(Case Western Reserve University, CWRU)轴承试验数据中心所公布的滚动轴承故障数据集。我们选取了试验台上驱动端轴承的故障振动信号,这些信号的采样频率为12千赫兹,采样时间为10秒。数据集包括了两种具有代表性的轴承故障类型,其故障直径分别为0.18毫米和0.36毫米,此外还包括了正常轴承,总共涵盖了7种不同的故障类型。
在本实验中,获得采样点数的方法是,通过公式
计算,整个轴承的转速为1772转/分钟,对于轴承的每个旋转周期,需要采样406个数据点。为了确保数据样本中的故障信息明确,我们设定样本长度为2048采样点。这样的设置有助于保留足够的信息以识别故障,并通过采用重叠采样的方法进行随机划分,以确保训练数据的充分性和多样性。这样的处理方式旨在提高模型对轴承故障特征的有效捕捉和泛化能力。我们将7种不同的原始一维振动信号转化为样本标签,每个类别包含400个样本,总共生成了2800个样本。我们按照3:1的比例将这些样本分为训练集和测试集。下表(表1)展示了各种轴承故障样本的分布情况。

Table 1. Sample distribution of rolling bearings
表1. 滚动轴承样本分布
3.2. 数据集的扩充测试

Figure 1. Schematic diagram of overlapping sampling
图1. 重叠采样示意图
在数据量有限的情况下,卷积神经网络(CNN)的训练可能面临一定的挑战,因为该模型通常需要足够的数据样本来确保准确性。因此,在数据受限的情况下,需要谨慎考虑如何优化模型的性能,可能通过数据增强、迁移学习或其他技术手段来缓解数据不足。本文采用了数据增强方式为重叠采样。示意图如图1所示。整个原始信号为实线框内的信号,而虚线框内的每个信号则代表一个样本信号。通过这种重叠采样的方法,原始信号被分割成多个样本信号,从而增加了训练数据的数量和多样性。这有助于提高模型对不同特征和模式的学习能力,同时增强了模型的鲁棒性,使其更能适应各种振动信号的变化。
4. 卷积神经网络
卷积神经网络(CNN)是一种深度学习模型,专门用于处理具有网格结构数据的人工神经网络。它在计算机视觉领域得到广泛应用,但也可用于处理时间序列数据和自然语言处理等领域。这种网络结构的独特之处在于其卷积层,这些层利用卷积操作从输入数据中提取特征。通过滤波器(又称卷积核),CNN可以检测输入数据中的各种特征 [10] 。这些卷积操作的结果构成了特征图,逐渐捕获输入数据中的关键特征。CNN通常包括卷积层、池化层和全连接层。由于CNN在图像识别、目标检测和语义分割等任务中表现出色,它已成为深度学习领域中的核心模型之一。其能够自动学习和提取特征,使其在处理各种类型的数据和任务中都非常有用。
4.1. 卷积层
卷积层的运算公式如下:
(8)
在上述式中,符号表示神经网络中的不同组件。这些符号共同构成了神经网络中的卷积层的基本元素,其中卷积核参数和偏置通过卷积操作对输入特征图进行处理,激活函数则引入非线性变换,最终形成神经网络的层与层之间的复杂计算关系。
4.2. 池化层
池化层的下采样操作可表示为:
(9)
在上述公式中,m表示池化的宽度;下采样函数则为down (∙);输入和输出用式中的x和y表示;down (x, g)输出的第n个元素用down (x, g) [n]来表示。本文采用最大池化,因此,池化操作被定义为取输入中对应池化窗口内的最大值,即使用g (x) = max (x)函数。这样的设计使得在进行下采样操作时,每个池化窗口的输出取其中的最大值,从而实现对输入数据地降维和特征提取。
4.3. 全连接层
在全连接层中,其中使用ReLU函数作为激活函数,通过对输入数据进行线性变换和非线性激活,网络可以学习到更高级的特征表示,进而用于最终的分类任务。因此,全连接层在神经网络中扮演着整合和抽象特征的重要角色,将前面层次提取的特征映射到最终输出层,完成对输入数据的分类任务。具体操作为:
(10)
4.4. Softmax分类器
Softmax分类器位于全连接层之后,也是用损失函数来评估,并对分类的正确与否进行调整。采用Softmax函数作为激活函数,用于对目标进行分类。Softmax函数的数学表达式为:
(11)
4.5. 损失函数与训练优化算法
损失函数在卷积神经网络(CNN)多分类问题中扮演着重要的角色,它通过测量模型的预测输出和真实标签之间的误差来进行反向传播,从而优化网络的参数。在这类问题中,通常会使用交叉熵作为损失函数,它与Softmax分类函数结合使用,用来度量模型的输出与真实标签之间的差异。交叉熵的值越小,意味着模型的预测效果越好,因为它更接近真实结果。交叉熵的公式如下所示:
(12)
4.6. 基础CNN模型设置
LeNet-5是一种经典的卷积神经网络(CNN)模型,已被广泛应用于解决图像分类问题。我们选择采用该模型来进行滚动轴承故障的分类任务。
为增加模型的识别精度和诊断效率,模型在原有的LeNet-5模型的基础上进行了参数设置和网络模型优化。首先,对卷积层的卷积核尺寸进行设置。卷积层在CNN中起到了特征提取作用,卷积核尺寸过小易导致特征提取不完全,而卷积核尺寸过大则不利于局部特征的提取,故设置卷积核尺寸为5 × 5。其次,在每个卷积层之后都添加了BN层,对输入数据进行归一化,保证模型不受内部协变量转移问题的干扰,并加快网络训练。最后,为了避免模型产生过拟合,在全连接层引入Dropout随机失活技术,并取值为0.5。模型选用ReLU作为激活函数,增加模型的非线性表达。在反向传播阶段,我们采用Adam自适应优化器来优化网络参数。这意味着我们使用Adam优化算法来调整神经网络中的权重和偏差,以最小化损失函数,从而提高模型的性能。设置学习率为1e-4,Mini-batch Size为10以提高模型的计算效率 [11] 。
5. GAF和改进卷积神经网络的故障诊断方法
目前在故障诊断环节中,对于原始数据的归一化预处理,许多学者采用了BN算法,该算法在保证数据分布的一致性方面有较强的优势,但由于BN的计算依赖于批尺寸的大小即Mini-batch Size,因此模型的诊断性能的稳定性有待进一步提高。
针对上述问题,提出了一种基于改进CNN的滚动轴承故障诊断模型将上节所提LeNet-5模型中的BN替换为GN,GN将通道分成若组,并在每组内计算平均值和方差以进行归一化。针对上述问题,提出了一种基于改进CNN的滚动轴承故障诊断模型将上节所提LeNet-5模型中的BN替换为GN,GN将通道分成若组,并在每组内计算平均值和方差以进行归一化。我们进行了详细的分析,研究了在不同数据集规模和不同Mini-batch Size条件下所提方法的稳定性和泛化性能。我们选择了不同规模的数据集,以及不同的Mini-batch Size设置,以深入了解所提方法在不同训练条件下的表现。
5.1. GAF-ICNN模型的提出
本节建立的卷积神经网络是在上文所提LeNet-5模型的基础上,将其中归一化算法BN替换成GN,其余结构不变,称其为改进卷积神经网络(ICNN)。并以GAF特征图作为ICNN的输入,提出GAF-ICNN滚动轴承故障诊断模型,其基本结构如图2所示。
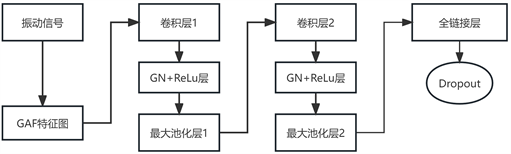
Figure 2. Basic structure diagram of the GAF-ICNN model
图2. GAF-ICNN模型基本结构图
5.2. 基于GAF-ICNN的滚动轴承故障诊断流程
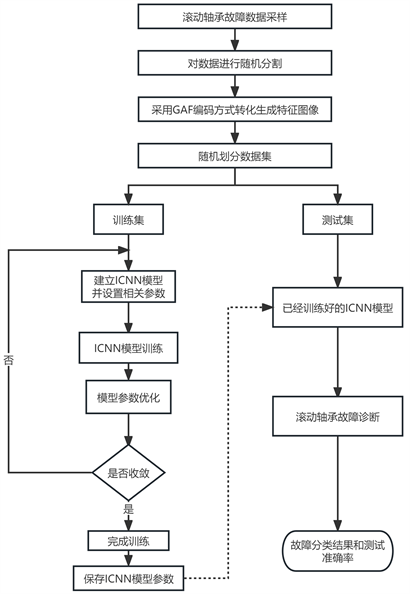
Figure 3. Flow chart of rolling bearing fault diagnosis method based on GAF-ICNN
图3. 基于GAF-ICNN的滚动轴承故障诊断方法流程图
我们的提出的方法称为GAF-ICNN滚动轴承故障诊断方法,它巧妙地结合了GAF编码方式对时间相关性的保留能力和卷积神经网络(CNN)在优秀特征提取方面的性能,取得了卓越的效果。流程图如图3所示。在训练过程中,我们运用Adam优化器来实时调整神经网络的权重和偏差,以最小化损失函数,完成模型参数的优化。在测试阶段,我们将包含故障信息的数据集输入到事先训练好的卷积神经网络(CNN)模型中。随后,我们利用Softmax分类器对故障进行识别和分类,并得到测试准确率的结果。这个过程有助于我们评估模型在新数据上的性能,确保其在实际应用中能够准确地辨识和分类不同类型的故障。具体的步骤包括:
步骤1:将ICNN模型进行训练所需要的滚动轴承振动信号进行收集;
步骤2:将从数据集采集的原始一维信号,按照预先设定的样本长度,进行随机切分;
步骤3:将分割后的每段信号利用GAF编码方式转换为二维特征图像;
步骤4:训练集和测试集的划分,按照前文中的构建方式按比例构建划分训练集和测试集;
步骤5:搭建ICNN网络模型,初始化参数;
步骤6:进行迭代预训练,通过将训练集输入ICNN模型,通过模型的优化算法不断调整模型参数。若未获得最佳参数一直重复进行步骤5,一直迭代直到获得最佳参数,并保存最佳模型;
步骤7:使用已经训练好的ICNN模型,将测试集数据输入,进行滚动轴承故障诊断,最终得出轴承故障的分类结果以及相应的测试准确率。
5.3. 基于不同归一化方法的故障诊断结果分析
ICNN网络结构参数设置如表2所示,除了第一个卷积层的卷积核数量和第一个池化层的核数量之外,其余结构参数与上文所提基础LeNet-5模型相同。在全连接层引入Dropout随机失活技术,并取值为0.5,使用Adam自适应优化器为网络的优化算法,设置学习率为1e-4,Mini-batch Size为10。
Table 2. ICNN model structure parameter settings
表2. ICNN模型结构参数设置
5.3.1. 模型数据分析
经过30轮对数据集A的训练,GAF-ICNN模型在图4中呈现出卓越的性能。分析图4表明,该模型的训练准确率高达99.97%,测试准确率也达到了99.71%。在经过15轮训练后,训练损失率下降至0.0067,并呈现出稳定的趋势。这一结果验证了GAF-ICNN模型在滚动轴承故障诊断方面表现出色。
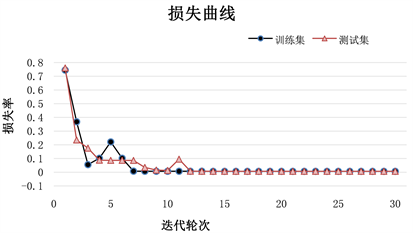
Figure 4. Accuracy vs. loss curve after model training
图4. 模型训练后的准确率与损失曲线
5.3.2. 不同数据集规模下的故障诊断稳定性比较
通过对表1中的数据集B进行滚动轴承故障识别,我们考虑了四种不同的归一化方法,包括不添加归一化,分别添加这四种归一化方法,以及在总数据集的100%、60%、30%和10%四种不同规模数据下进行对比分析。这些CNN模型的结构参数设置与ICNN相同。我们使用了五种方法对缩减后的故障数据集进行测试,然后计算了五次实验的平均值,表3为实验的结果。
Table 3. Model recognition accuracy at different dataset sizes
表3. 不同数据集规模下的模型识别准确率
从表3中的数据可以清楚地看出,本章介绍的基于GN的ICNN模型在不同数据规模下表现出比其他方法更高的平均识别准确率。当数据规模为100%时,ICNN的识别准确率高达99.97%,明显优于未添加归一化方法的模型(99.43%)、基于BN模型(99.83%)、基于IN模型和基于FRN模型(99.94%)。然而,其他四种方法的识别精度随着数据规模的减小也相应下降。归一化方法在小样本情境下十分重要,当数据集大小为总数据集的10%时,未采用归一化方法的模型准确率降至86.29%,相比100%数据集下下降了13.14%。基于FRN的模型准确率下降到93.43%,是四种添加了归一化方法中识别准确率最低的,相比100%数据集下下降了6.51%。基于BN和IN的模型准确率分别下降了3.83%和3.66%。相反地,基于GN的ICNN模型在数据集规模减小时,仍能保持97.43%的识别率,仅比100%时低2.54%。这些结果清晰地表明,随着数据集规模的减小,本章所提出的方法相对于其他方法具有更高的识别准确率。
5.3.3. 不同Mini-batch Size下的故障诊断泛化性能比较
在选用BN为卷积神经网络模型中数据归一化方法时,由于BN的计算是对每一批数据即Mini-batch做归一化,因此对Mini-batch Size较为敏感。而IN、FRN等方法均可以解决这个问题,为了验证GN在解决这个问题上的优越性,分别与不添加归一化和分别添加3种不同的归一化方法的卷积神经网络模型在10%规模数据集下进行对比分析,使用表1中的数据集B作为训练集和测试集,我们进行了5次独立运行的实验,并将每次运行的测试结果进行了平均。这样的做法有助于减小实验的随机性影响,提高结果的可靠性。通过对5次实验结果取平均值,结果如表4所示。
Table 4. Model recognition accuracy at different Mini-batch Size
表4. 不同Mini-batch Size下的模型识别准确率
从表4可以看出,本章所提基于GN的ICNN模型在Mini-batch Size为8时识别效果最佳,其识别准确率达到98%,均高于其余4种模型最大识别准确率,分别比不添加归一化方法高4.57%、基于BN的模型高0.86%、基于IN的模型高0.57%和基于FRN的模型高4.57%。随着Mini-batch Size的变化,各模型的识别准确率均有一定的波动,其中基于GN的ICNN模型受Mini-batch Size变化的影响最小,Mini-batch Size为64时识别准确率最低,为95.43%,仅比Mini-batch Size为8时低2.57%;在所有5种模型中,不添加归一化方法的CNN模型受Mini-batch Size变化的影响最大,在Mini-batch Size为64时识别准确率仅为74%,比最大识别准确率低19.43%;而在4种添加了归一化方法的模型中,基于FRN的CNN模型受Mini-batch Size变化的影响最大,在Mini-batch Size为4时识别准确率仅为78.86%,比最大识别准确率低13.57%。以上结果说明了基于GN的ICNN模型可以较好的解决卷积神经网络受Mini-batch Size变化较为敏感的问题,在10%规模数据集下ICNN模型的故障识别效果最好。
6. 结论与展望
本论文介绍了一种基于改进卷积神经网络的新模型,称为GAF-ICNN。该模型采用GAF对获得的初始振动信号进行编码,并一维信号生成的二维图像输入至ICNN进行故障诊断。以下是相关结论:
1) GAF编码的成功应用:通过采用GAF对获得的初始振动信号进行编码,成功地保留了原始信号中的时序关系,有助于解决信号中故障信息容易丢失的问题。该编码方法应用于经过改进的LeNet-5卷积神经网络模型,实现了更准确的滚动轴承故障诊断,达到了99.97%的识别准确率。
2) 出色的小规模数据集性能:研究结果表明,GAF-ICNN模型在数据集规模减小的情况下表现出色。即使将数据集规模缩小至总数据集的10%,平均准确率仍然能够保持在97.43%的高水平,使其成为处理小规模数据集时的最佳选择。这一性能可能归因于模型对数据地高效利用和对特征地精准提取,展现了更为强大的稳定性。
3) 卓越的泛化性能:在不同的Mini-batch Size条件下,进行了模型的泛化性能研究。实验结果清晰地表明,相对于其他算法,GAF-ICNN模型在不同Mini-batch Size下依然能够维持卓越的诊断准确性,展示了其更出色的泛化性能。这使得该模型在不同训练条件下都能保持优越性能。
基金项目
浙江省2023年度“尖兵”“领雁”研发攻关计划(2022C01SA111123),国家自然科学基金资助项目(51475434)。