1. 引言
近年来,人们已经广泛研究了神经网络的同步控制 [1] [2] 。例如, [3] 提出了神经网络同步的自适应控制。但是由于控制器是连续的会占用许多通信频道, [4] 提出了神经网络的周期间歇同步控制。这个控制器应用的方式是周期采样,显然可以减少占用通信频道。 [5] 提出了事件触发神经网络的同步控制,该控制器不仅可以避免周期采样而且可以减少占用通信频道。由于上述神经网络的同步控制都不能估计到达同步的时间, [6] 提出了有限时间神经网络的同步控制。虽然可以知道神经网络实现同步的估计时间,但是估计的同步时间严重依赖于初值。固定时间神经网络的同步控制 [7] 很好的解决了这个问题,其同步估计的时间与初值完全无关。因此,固定时间神经网络的同步控制显然更具有应用价值。
以上文献设计神经网络的同步控制所对应矩阵的连接权重都是无符号的 [8] ,即连接权重都是正的。因为现实中对应矩阵的连接权重普遍为有正有负,从而无符号图神经网络的同步控制有着极大的局限性。由于符号图神经网络同步控制所对应的矩阵的连接权重可以是正的和负的,因此符号图神经网络的同步控制 [9] 有着更重要的现实意义 [10] 。提出了带有常时延神经网络的有限和固定时间的二分同步控制。遗憾的是时延为常数,而更有挑战的时变时延没有考虑 [11] [12] 。
基于上述考虑,本文研究了符号图时变时延神经网络的有限和固定时间同步控制。尽管 [10] 已使用规范变形的方法来研究结构平衡的符号图线性系统,但该方法对于结构不平衡的符号图非线性系统不适用。本文通过定义在符号图下的M矩阵,克服使用规范变形的局限性。此外, [10] 中的时延为常数时延,而本文研究的为有界时变时延,显然更具实际意义。
2. 模型描述
对于
,
表示它的谱范数。对于
,
代表它的二范数,
,
,
,
,
和
,
,
。函数
满足
当
,
当
和
当
。
我们考虑下面的延迟神经网络
(1)
其中
是状态变量,
是正对角矩阵,
是连接权重矩阵和
是延迟连接权重矩阵,
和
是激活函数,
是时变延迟并满足
和
是我们之后设计的控制输入。为了之后的便利,令a满足
。
控制输入
为
(2)
其中
和
是耦合强度和
满足
。
令
且将(2)代入(1)得:
(3)
其中一些符号分别为
,
,
,
,
和
。
激活函数
满足下面的假设1和
。
假设1 [13] 对于任意的
,存在
,
,
使得下面的不等式
成立,其中
满足
。
为了之后的便利,我们令
和
。
对于任意的初值
,假设系统(3)的解是存在的。
定义1 [14] 对于任意的初值
,如果
成立,其中
有界,则系统(3)将实现有限时间的二分同步。
定义2 [14] 对于任意的初值
,如果
和
成立,其中T有界,则系统(3)将实现固定时间的二分同步。
注1:若在定义1和2中的
,则有限时间和固定时间的二分同步将分别退化为有限时间和固定时间的稳定。
由于控制器(2)是不连续的,为了之后的需要,我们引入集值李导数 [2] 的定义。
1) 考虑这个系统
,若函数
是不连续的,我们定义f的Filippov集值映射
,其中
表示集合E的凸包,
为
和
表示集合
的Lebesgue测度。
2) 令
表示函数
所有不可微点的集合,我们定义
的广义梯度
,
,其中
是凸包,
表示0测度集和
为
。
结合1)和2),函数
关于f在x处的集值李导数定义为
.
神经网络间信息交流的结构可以通过符号图
来刻画,其中
表示神经网络
的集合,
表示神经网络相互交流边的集合和
表示连接矩阵。在本文中,若
成立,则定义
为
。否则,定义
为
。在G中没有自环,即
为
。此外,矩阵C的对称元素满足
。与G相对应的拉普拉斯矩阵L中的元素定义为
定义3 [15] 如果V满足
和
且当
,
,
和当
,
,
,
成立,则G是结构平衡的。否则,G是结构不平衡的。
假设2 [15] G是无向的和连通的。
引理1 [15] 如果G满足假设2,则L的特征值不等式有下面的两种情况。
1) 若G是结构平衡的,则L的特征值满足下面的不等式
2) 若G是结构不平衡的,则L的特征值满足下面的不等式
受无符号图 [16] 中M矩阵的启发,本文定义了符号图下的M矩阵,它的行和列对应G的边和节点且其元素与第l条边所对应的
的符号相关。当
,定义
和
分别为
与
和当
,定义
和
为
,这仅仅局限在无符号图中。但在符号图中,当
,不同的是定义
和
分别为
与
。
引理2 [9] 拉普拉斯矩阵L和矩阵M满足关系
。
引理3 [17] 若
成立,则它们满足
,
.
引理4 [17] 如果可微函数
是一个正定函数并满足
(4)
则
,
和
成立。
引理5 [17] 假设
是正定的且在
内的任意紧子集,
是绝对连续的。如果有一个连续函数
,满足
(5)
和
,则
成立。
引理6 [9] 假设
是正定的。如果
(6)
成立,其中
和
,则
成立且
满足
(7)
3. 理论分析
在这一节,我们将说明在设计的控制器之下可以实现系统(3)有限和固定时间的二分同步。
3.1. 有限时间的二分同步
首先我们证明在一些条件下,有限时间控制器(2)可以保证系统(3)有限时间的二分同步。
定理1:若假设1和假设2成立,则我们有下面两个结果:
1) 如果G是结构平衡的且存在
使得
(8)
成立,则可以实现系统(3)的有限时间二分同步,其同步时间
满足
(9)
2) 如果G是结构不平衡的且存在
使得
(10)
成立,则可以实现系统(3)的有限时间稳定,其同步时间
满足
(11)
证明:选择下面的李雅普洛夫函数
(12)
其中一些符号分别为
和
。
用
表示(3) 式的右端,则
的集值李导数满足:
(13)
其中一些符号分别为
,
,
,
,
。
由(13)的第一项,我们有
(14)
根据假设1,(13)的第二项满足
(15)
根据引理2和假设1,(13)的第三项满足
(16)
1) 根据引理1和假设2,如果G是结构平衡的,则(13)的第四项满足
(17)
此外,根据引理2,由(13)的第五项可以导出
(18)
根据引理2,由(13)的最后一项,我们有
(19)
其中函数
满足
(20)
由(13)~(19),显然,
为标量函数且满足
(21)
如果(8)成立,则
(22)
由于
,
,根据引理3,则可以导出
(23)
因此,由(23),
满足
(24)
根据引理4,我们有
(25)
从而,
满足(9)。
2) 类似地,显然可证
满足(11)。
3.2. 固定时间的二分同步
这一节中,设计固定时间控制器确保系统(3)固定时间二分同步和稳定。
如果
(26)
是新的控制输入,其中
满足
。可以证明控制输入(26)可以保证系统(3)固定时间的二分同步和稳定。
定理2:若假设1和假设2成立,则我们有下面的两个结果。
1) 如果G是结构平衡的且存在
使得
(27)
成立,则系统(3)可以实现固定时间的二分同步,其同步时间
满足
(28)
2) 如果G是结构不平衡的且存在
使得
(29)
成立,则系统(3)可以实现固定时间稳定,其同步时间
满足
(30)
证明:由引理2,我们有
(31)
其中
和
,
。
由于
,
,根据引理3,则可以导出
(32)
结合引理6和定理1的证明,定理2的两个结果是显然易证。
4. 数值模拟
为了验证定理1和定理2中控制器的有效性,我们考虑四个节点的神经网络(3),其结构平衡和结构不平衡的符号图分别是图1(a)与图1(b),
和
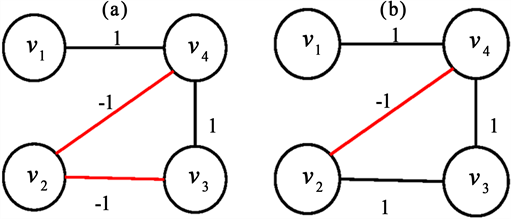
Figure 1. Signed graphs G of structurally balanced and structurally unbalanced
图1. 结构平衡和结构不平衡的符号图G
根据上述的条件,我们可以导出
,
,
,
,
和
。为了验证控制输入(2)的有效性,令
为
。若结构平衡符号图G是图1(a)且
和
分
别为
和
,则条件(8)成立。此时图2(a)~(c)和图2(d)分别是神经网络(3)的轨迹和误差轨迹。若结构不平衡符号图G是图1(b)且
和
分别为
和
,则条件(10)成立。此时图3(a)~(c)和图3(d)分别是神经网络(3)的轨迹和误差轨迹。由图2和图3,在控制输入(2)下,神经网络(3)可以分别实现有限时间二分同步和稳定。
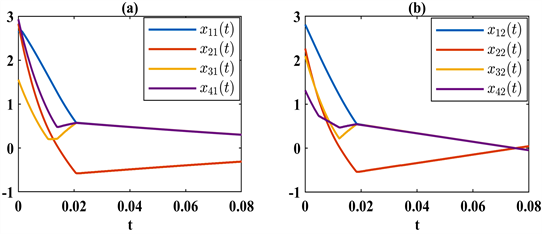
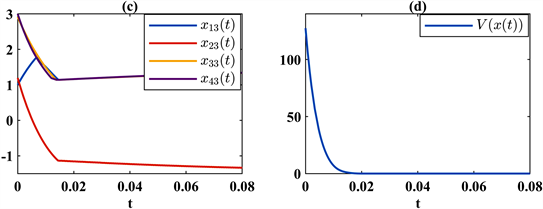
Figure 2. Finite-time bipartite synchronization of neural networks (3) in the structurally balanced signed graph Figure 1(a)
图2. 在结构平衡图图1(a)下神经网络(3)的有限时间二分同步
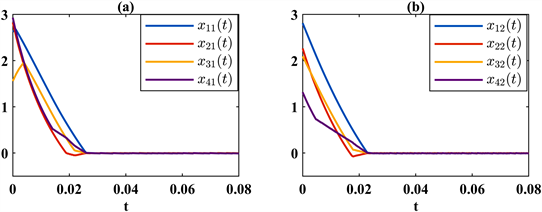
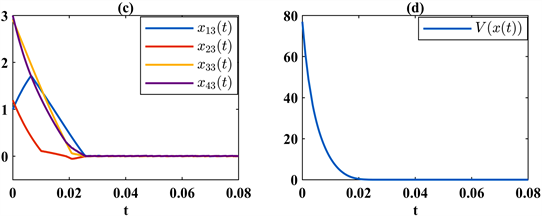
Figure 3. Finite-time stability of neural networks (3) in the structurally unbalanced signed graph Figure 1(b)
图3. 在结构不平衡图图1(b)下神经网络(3)的有限时间稳定
为了验证控制输入(26)的有效性,令
与
分别为
和
。若结构平衡符号图G是图1(a)且
和
分别为
与
,则条件(27)成立。此时图4(a)~(c)和图4(d)分别是神经网络(3)的轨迹和误差轨迹。若结构不平衡符号图G是图1(b)且
和
分别为
与
,则条件(29)成立。此时图5(a)~(c)和图5(d)分别是神经网络(3)的轨迹和误差轨迹。从图4和图5,在控制输入(26)下,神经网络(3)可以分别实现固定时间二分同步和稳定。
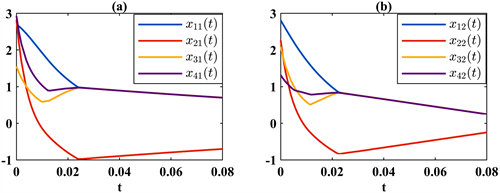
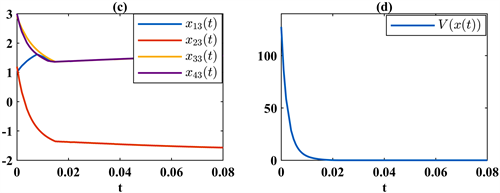
Figure 4. Fixed-time bipartite synchronization of neural networks (3) in the structurally balanced signed graph Figure 1(a)
图4. 在结构平衡图图1(a)下神经网络(3)的固定时间二分同步
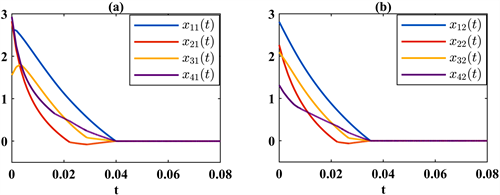
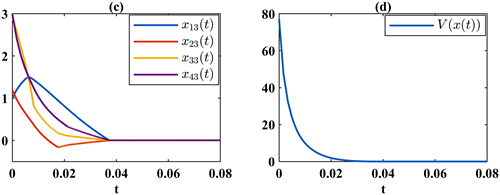
Figure 5. Fixed-time stability of neural networks (3) in the structurally unbalanced signed graph Figure 1(b)
图5. 在结构不平衡图图1(b)下神经网络(3)的固定时间稳定
5. 结论
本文设计了符号图时变时延神经网络有限时间和固定时间二分同步控制,得到其可以实现有限和固定时间二分同步的充分条件和相应的估计停时。由于无界时变时延对符号图神经网络的动力学有重要影响,未来我们进一步探究这个问题。