摘要: 近年来,消费级无人机由于价格低廉、作业灵活方便,逐渐成为小区域航空摄影测量的主要作业方式。随着测量技术的快速、多元化发展,无人机航测以轻便灵活、机动高效、作业成本低、生产周期短等特点成为测量行业的主流方法之一。正射影像图作为摄影测量常见的工作内容之一,在国家和地方高精度空间基础数据数字化中有着广泛应用。如何以消费级无人机为基础,生产出高质量的正射影像图,对提升城市空间数字化发展水平至关重要。本文通过无人机正射技术构建了长江河道正射影像模型,以南京长江北岸为研究区域,基于无人机正射技术,选取大疆精灵4RTK进行飞行作业。选取Dji Terra处理遥感影像进行建模。进行建模后达到了预期的效果。传统的测绘级无人机一般以固定翼为主,造价昂贵,单次飞行成本较高,而对于小区域正射影像图制作来说,其飞行时间短、成本高。相较于测绘级无人机,消费级无人机虽然硬件基础存在一定不足,但是灵活度高,适用范围广。如何以消费级无人机为基础,优化外业作业方式,并尽量提高正射影像图精度是近年来相关研究的重点和难点。
Abstract:
In recent years, consumer-grade UAVs have gradually become the main operation mode of aerial photogrammetry in small areas due to their low price and flexible operation. With the rapid and diversified development of surveying technology, UAV aerial survey has become one of the main-stream methods in the surveying industry with the characteristics of lightness, flexibility, maneu-verability and efficiency, low operating cost and short production cycle, and orthophoto image, as one of the common work contents of photogrammetry, has been widely used in the digitization of national and local high-precision spatial basic data. How to produce high-quality orthophotos based on consumer-grade drones is crucial to improving the digital development of urban space. In this paper, an orthophoto image model of the Yangtze River channel is constructed by UAV orthorection technology, and the north bank of the Yangtze River in Nanjing is the research area, and the PHANTOM 4RTK is selected for flight operations based on UAV orthorection technology. Dji Terra is selected to process remote-sensing images for modeling. The modeling achieved the desired effect. Traditional surveying and mapping UAVs are generally based on fixed wings, which are expensive and have high single flight costs, while for the production of small area orthophotos, their flight time is short and costly. Compared with surveying and mapping UAVs, although the hardware foundation of consumer UAVs has certain deficiencies, it has high flexibility and a wide range of applications. How to optimize the field operation mode based on consumer UAVs and try to improve the accuracy of orthophoto maps is the focus and difficulty of relevant research in recent years.
1. 引言
近些年,随着无人机技术的发展,正射影像技术在城市三维建模、数字地形测绘、地籍测绘、不动产测绘等领域得到了广泛的应用。目前我国水利工程建设规模仍在逐年扩大,无论是投建还是后续管理区域划定,测绘始终贯穿于各个环节,尤其河道测绘数据的真实性、精准性,直接影响水利工程项目整体品质,传统河道测绘依赖人工实地测绘,耗费人力、时间资源极大 [1] ,随着无人机航测技术的推广普及,其在河道测绘中的应用从长远来看也为我国水利行业得以形成可持续发展模式提供了有力参考依据。国外学者普遍借助高分辨率无人机传感器,如LiDAR和多光谱相机,获取河道周边地区的精细影像。这些影像对于水域生态系统、土壤侵蚀和植被健康的研究提供了高分辨率的数据。通过搭载先进的传感器,研究者可以生成高精度的河道地形模型,为水文模拟和水资源管理提供支持。利用无人机河道正射影像进行时序分析,监测河道及其周边环境的变化,包括河岸线的演变、水域面积的变化等。借助无人机技术改进水资源管理和环境监测,这包括水质监测、水量估算以及对水域生态系统的影响评估。中国在无人机技术领域取得了显著进展,研究者们将无人机广泛应用于农业、林业、环境监测等领域,也包括了河道正射方面的研究。注重将遥感技术应用于水资源管理中,通过获取无人机正射影像,更好地监测水域变化、水质情况以及植被分布。无人机航测技术在河道测绘中的应用,较之传统测绘技术而言,虽然更加高效、便捷,但与此同时其所涉及各类专业知识点也较多,实践期间任一环节出现问题都会导致应用效果大打折扣的状况发生,所以具体到应用环节,相关专业从业人员必须对无人机航测技术要点和应用原理、架构有深度认知 [2] 。确保无人机航测技术所生成河道区域内正射影像图精准度,使无人机航测技术应用价值的优势可以充分得到发挥 [3] 。
2. 无人机正射技术
无人机正射技术是一种利用无人机(Unmanned Aerial Vehicle, UAV)进行航拍,并通过特殊处理得到的正射影像的技术。在进行航拍任务之前,需要进行飞行计划,包括飞行高度、航线设置、相机参数配置等。飞行计划的设计会影响到后续正射影像的质量。通过使用专业的遥感图像处理软件,如Pix4D、Agisoft Metashape等,对采集到的航拍图像进行处理。无人机正射技术的应用领域包括土地利用规划、环境监测、城市规划、农业管理等。通过无人机正射技术获取的高分辨率影像,可为各种领域的空间分析和决策提供有力支持。
3. 航线参数设计
航摄参数设计主要技术指标包括地面分辨率、航行高度范围、拍照模式、云台角度和像素片重叠度系数等。外业数据采集方案影响着原始数据质量,对整个项目的顺利完成起着关键作用。在数据采集前,应根据测区范围收集相关资料,包括测区现有的各比例尺地形图、规划图,测区范围无人飞行器限制飞行情况、现有的数字高程模型、控制点资料,通信网络覆盖情况等资料。在充分收集现有资料的基础上根据测图任务要求、测区地形地貌、植被覆盖情况、高耸建、构筑物﹑交通状况等综合分析,研究外业采集方案,编制任务大纲和设计书。由于消费级无人机镜头搭载数量有限,单次飞行时间短,且差分定位精度低,因此外业需要选择合理的飞行方案,既要保证数据采集精度,又要兼顾外业采集效率 [4] [5] 。
3.1. 地面分辨率
地面分辨率(GSD)是指每毫米所能辨别的黑白相隔的线对数(线对/毫米),通常以像元的大小来表示,一般像元越小,地面分辨率越高,信息量越大,通常以表1作为参考 [6] 。地面分辨率的值越小,表示影像具有更高的细节级别。较小的地面分辨率意味着每个像素对应的地面区域较小,影像具有更高的细节,适用于需要高精度信息的应用。相反,较大的地面分辨率表示每个像素对应的地面区域较大,适用于覆盖广泛区域但不需要过多细节的应用。地面分辨率是遥感图像中一个重要的参数,它直接影响到图像的信息量和应用的实际效果。在不同的应用场景中,根据需求选择适当的地面分辨率非常关键。

Table 1. Value reference of ground resolution
表1. 地面分辨率取值参考
3.2. 重叠度
重叠度越高,航线就越密集,特征点的数目越多,错误匹配的数目越少,正射图像的准确度越高;图像的重叠度越高,图像中的空间和纹理信息也会越多,成图效果更好。由于消费级无人机飞行姿态变化较大,因此对重叠率要求更高。
3.3. 航线规划
使用大疆的Dji Pilot进行航线规划。通过高级设置可设置采集相片的重叠率。为了提高模型质量,采用的航向重叠率为60%、旁向重叠率为60%,开启畸变矫正。在航线规划完成后,对起降场地进行评估,选择磁场干扰较小,距离作业区域边界较近的场地作为起降场地。南京长江北岸飞行轨迹如图1所示。

Figure 1. Flight trajectory on the north bank of the Yangtze River in Nanjing
图1. 南京长江北岸飞行轨迹
4. 作业区域概况
无人机正射作业区域为南京市浦口区和六合区,地处中纬度地带东经118.761˚~119.08˚,北纬32.165˚~32.246˚。属亚热带季风气候,四季明显,温差较大。正射作业区域面积为30.683808平方公里,海拔高度为5.2~7.7 m,地形起伏较小,航带长度42公里左右,作业区域内工业厂区和湿地较多,工业厂区内建筑、构筑物较多,各种工业管道、储罐较为密集,信号干扰较大,测区内通视状况较差,交通状况较差,部分区域属限行管制区域,其中溥仪公路至北汊大桥为南钢集团工业厂区和中国石化集团工业厂区,马汊河至岳子河段为扬子石化集团工业厂区,岳子河至皇厂河路段为扬子石化集团液体码头作业区,皇厂河路至作业结束区域滁河均为湿地,作业区域有栖霞山大桥和在建的仙新路长江大桥高度均高于无人机作业高度。航带最宽区域为2655米。
5. 正射影像
在对研究区域进行数据采集后,可对影像数据进行预处理。先检查照片质量,结合影像的POS数据、布设的像控点等信息进行空中三角测量 [7] ,然后通过图像几何畸变校正、图像增强、影像拼接等处理,生产正射模型。处理遥感影像的建模过程如图2所示。
6. 长江三维正射建模应用
6.1. 作业前准备
1) 现场勘察:测区有较多工厂,其中溥仪公路至北汊河大桥为南钢集团和中石化集团,信号干扰较大,无人机无法顺利校准地磁,无法起飞。因此,选择至对岸八卦洲作为起飞点。
2) 作业区域规划:在航线规划软件中规划航测区域。
3) 飞行参数设置:
① 拍照模式设置为等距间隔;
② 飞行高度设置为120米;
③ 云台角度设为−90度;
④ 航线重叠度和旁向重叠度均为60%。
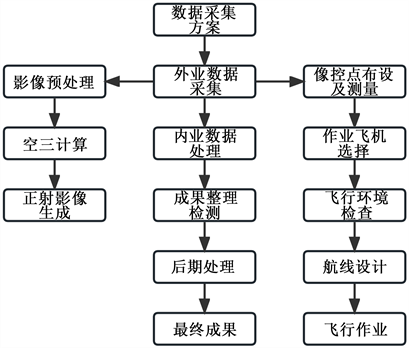
Figure 2. Modeling process for remote-sensing images
图2. 遥感影像建模流程
6.2. 获取遥感影像
使用大疆精灵4RTK无人机对长江河道区域进行作业。使用精灵4RTK无人机作业时,根据无人机设备的精度要求,将航向重叠度和旁向重叠度都设置为60%。设置航线避开超高建筑,飞行高度设定为120米,飞行总架次252次。在Dji Pliot地图界面划分作业区域,选择作业相机,输入上述参数,设定云台斜射角度为−90度,等距间隔拍照,起飞速度、航线速度均调至最高。作业任务结束,大疆精灵4RTK共获得18,946幅有效影像。
6.3. 数据处理
检查照片质量合格、POS信息无误、相机文件及数据点完整后,打包导入。利用Dji Terra的重建功能,添加照片进行建图,点击重建,进入重建界面,添加照片,选中照片添加。在参数设置完后点击开始重建。
6.4. 空三计算
空三质量报告如表2所示。
Table 2. Air triangulation quality report
表2. 空三质量报告
6.5. 成果展示
栖霞山大桥高度过高,超出无人航空器的航线高度,因此飞行航线避开此桥。最终成果如图3和图4所示。

Figure 3. Orthophoto of the north bank of the Yangtze River in Nanjing
图3. 南京长江北岸正射影像

Figure 4. Orthophoto details of the north bank of the Yangtze River in Nanjing
图4. 南京长江北岸正射影像细节
7. 模型质量分析
成果完成之后,对平面精度、高程精度和重投影均方差精度进行检查 [8] 。
正射模型平均地面分辨率为0.034 m/像素,平均重投影误差(RMS)为0.5像素,重投影误差(RMS)为0.56像素,连接点最高分辨率为0.0153米/像素,最低分辨率为0.057米/像素,中位分辨率为0.0307米/像素,与光线的距离的(RMS)为0.1102米。报告中的详细数据如表3所示。
8. 模型精度验证
为了保证模型的可靠性,对三维模型结果进行精度验证。以各方向及平面的中误差作为精度评价指标,公式为:
 (1)
(1)
(2)
(3)
(4)
式(1)~(4)中,Mx、My、Mz、M分别为X、Y、Z方向的中误差和平面的中误差;n为检算值数目。
通过影像位置不确定性计算出影像位置与实测坐标之间的差值Δx、Δy、Δz,进而进行结果精度的分析与研究。影像位置与实测坐标之间的差值见表4。
Table 4. Difference between the image location and the measured coordinates
表4. 影像位置与实测坐标之间的差值
将表4中的数据代入式(1)~(4),计算可得:
Mx = 0.0136 m,My = 0.0033 m,Mz = 0.0147 m,M = 0.0140 m。
通过分析可知,X方向最大误差为0.0207 m,中误差为0.0136 m;Y方向最大误差为0.05727 m,中误差为0.0033 m;Z方向最大误差为0.05151 m,中误差为0.0305 m;平面中误差为0.014 m。通过无人机正射技术建成的目标区域正射影像精度较高,达到了《数字正射影像质量检验技术规范》(CH/T 1027-2012)的相关标准。
9. 结束语
本文通过无人机正射技术、建模技术,以南京浦口和六合长江河段为研究区域进行正射建模试验,结果表明:
1) 基于无人机正射技术,借助Context Capture和Dji Terra软件构造的正射模型与真实的河道有着高度的一致性,其精度符合规范要求,验证了无人机正射技术构建正射模型的可行性。
2) 正射影像的误差达到了《数字正射影像质量检验技术规范》(CH/T 1027-2012)的相关标准,验证了构建正射影像的可靠性。
参考文献