1. 引言
近年来,多智能体系统已广泛应用于生物学、工程学和物理学等领域。如卫星通信系统、交通系统和空间飞行器编队飞行。一致性问题是多智能体系统中的重要研究领域之一,旨在设计一种控制器(控制协议),利用相邻智能体之间的信息交换将所有智能体引导到相同的状态。越来越多学者对一致性问题进行了持续研究并取得成果 [1] [2] [3] 。
在研究一致性控制问题过程中,多智能体系统的实际应用受到有限的能量存储和通信资源的限制,为了节约信息传输资源,提出了一种事件触发控制方法,该方法使用预定的事件触发函数确定每个智能体间信息传输的时刻,在不满足触发条件时拒绝信息传输。事件触发控制方法的研究可以追溯到20世纪90年代 [4] [5] ,文献 [6] 中设计了具有集成观测器的事件触发控制器用于多智能体系统一致性控制。在文献 [7] 中引入了分布式事件触发控制器,用以节约通信资源。然而,上述文献中的事件触发函数的设计要求需要持续监测所有智能体的触发条件,在实际应用中需要特定的硬件设备同时需要证明无Zeno行为即在事件触发控制中有限时间内发生无限次触发现象 [8] [9] 。因此在后续问题研究中在每个智能体中设计基于采样数据的事件触发控制器,系统只有在采样时刻才会将智能体信息传输到事件触发控制器 [10] [11] 。基于采样的事件触发控制引入具有两个优点:首先,事件仅在离散采样时间被检测到,减少智能体间信息交换同时节约通信资源,其次,事件触发之间的最小时间由采样周期保证,从而直接避免Zeno行为。因此,研究基于采样的事件触发控制具有广泛的实际意义。
在实际应用中,非线性系统相较于线性系统更为常见,证明系统稳定性难度更大。设计非线性多智能体系统的一致性控制器已成为热点研究领域。其中,满足Lipschitz非线性动力学条件的多智能体系统在实际中应用广泛,在文献 [12] 中,研究了一类扰动非线性多智能体系统的有限时间一致性问题,其非线性满足Lipschitz动力学条件。在文献 [13] 中研究了Lipschitz非线性多智能体系统在定向网络中具有动态事件触发机制的同步问题。在文献 [14] 中提出了一种分布式事件触发控制策略,用于研究具有Lipschitz非线性动力学的多智能体系统中的群聚问题。上述文献对Lipschitz非线性多智能体系统的研究集中于一般正则系统,因此在奇异系统中研究具有非线性条件多智能体系统具有一定的创新意义。
外部扰动影响闭环系统稳定性,如何消除扰动对多智能体系统一致性的影响成为一个活跃的研究问题。现有的消除扰动影响一致性控制策略通常可以分为两类。一种是反馈控制,通过抑制扰动来改善控制性能,例如
控制 [15] [16] ;另一种是前馈控制,通过观测器估计扰动并利用补偿器进行补偿来消除扰动对系统稳定性的影响 [17] 。文献 [18] [19] 中采用主动抑制扰动的方法,设计了一种扩展状态观测器对干扰进行估计,随后基于观测器提出了一种分布式控制协议,用于实现系统的领导跟随一致性。本文根据上述文献启发引入状态扩展观测器的方法对未知扰动进行估计,通过补偿器主动抑制抵消扰动影响,从而实现多智能体达到一致性效果。
基于上述讨论,本文研究了具有未知扰动的奇异多智能体系统在非线性满足Lipschitz条件下的事件触发跟踪控制问题,具有一定的创新性。主要贡献有三个方面:
1) 将每个动态智能体表示为奇异系统,并使用事件触发控制减少不必要的通信资源浪费,事件触发信号基于系统周期性采样数据,避免Zeno现象发生。
2) 解决Lipschitz型非线性和外部扰动对奇异多智能体系统一致性控制的影响。
3) 扰动和智能体的局部状态估计仅基于相对输出信息。所提出的方法在实现领导跟随一致性过程中同时保证奇异多智能体系统的稳定性、正则性和无脉冲性。
符号说明:表示n维欧氏空间。上标“T”表示转置,𝟏为列向量,每一项为1,
是克罗内克积的算子。I和0代表单位矩阵和零矩阵。
2. 预备知识
图论
系统通信拓扑图用
表示,其中
是所有智能体节点的总集合,
为边集,
为加权邻接矩阵。
且
表示节点i可以从节点j接收信息,智能体i的邻居集定义为
。拉普拉斯矩阵定义为:
(1)
如果存在一个根节点i,使得该节点至少有一条到所有其他节点的有向路径,则称图
包含有向生成树。由1个领导者和N个跟随者组成的通信网络记为
,其中
,
且
,
当且仅当跟随者可以接收到领导者的信息,
,另外,拉普拉斯矩阵定义为
,其中,
。
3. 问题描述与研究方法
3.1. 问题描述
假设多智能体系统中有1个领导者和N个跟随者,其中领导者动力学模型为:
(2)
其中,
分别是领导者的状态、输出,
表示外部未知干扰。
跟随者动力学模型为:
(3)
(3)式中,
和
分别是跟随者的状态,控制输入和输出。
是具有合适维度的已知实常数矩阵,并且满足
。
为第i个子系统的非线性动力学函数。假设
关于时间变量t连续并且关于状态变量
具有Lipschitz性质。对于非线性向量值函数
,若在定义域
内,对于任意
,都
使得
(4)
则称
在定义域
内关于变量x具有Lipschitz性质,称
为Lipschitz常数。
3.2. 扩展状态观测器
为了引入基于输出信息的扩展状态观测器,用以估计系统的状态信息。将系统(3)重写为以下形式:
(5)
其中,
引入状态扩展变量
,为每个跟随者设计以下使用相对输出信息的观测器:
(6)
其中,
,
是扩展变量
的估计值,
和
是智能体状态和外部干扰的估计值。
3.3. 事件触发机制
设计一种基于采样数据的事件触发控制策略。在每个采样时间,事件触发函数用于确定自身状态信息是否需要传输到其邻居智能体。假设状态
的采样周期为h。当前采样信号用
表示。在网络中,信号以单个数据包的形式传送,假定传输过程中没有数据包丢失。对于智能体i,传输时间
由以下事件触发函数确定:
(7)
(8)
表示事件触发时刻传输状态和
表示采样状态,定义误差
,其中
、
表示观测器估计值,
,正定矩阵
和正标量
是要设计的参数。
在通信延迟的影响下,信号
无法在
时刻到达智能体j,因此,式(3.6)是通过使用当前采样信号
和信号
计算的,其中
是智能体i在
之前最近的事件触发时间。如果(3.6)满足条件,
将被发送到它的邻居。因此,如果智能i是智能体j的邻居,则信号在
时刻到达智能体j,即
其中
表示可用于智能体j的信号。序列
表示从智能体i到智能体j的通信延迟,满足
,其中
是通信延迟的上限。
注释1 本文提出了一种基于采样数据的奇异系统事件触发采样方案,系统通信仅在采样时间发生,无需连续监测相邻状态,且减少了控制输入更新的次数。由于系统通信仅在采样时间内发生,因此任意两个触发时间之间必然有一个正的下限,事件之间的时间间隔至少受到采样周期的限制,从而避免了Zeno现象发生。
3.4. 控制协议设计
利用状态观测器对状态信息的估计值,基于事件触发控制方法,分布式控制协议设计如下:
(9)
其中
是标量,K为反馈增益系数。
设计观测器误差:
(10)
公式(10)中,
,
,结合公式(5)和(6),误差系统可表示为:
(11)
公式(11)中,
,
,
。式(11)经Kronecker积运算得到:
(12)
其中
。
定义1 [20] 奇异系统
,如果满足:
i)
不为零
ii)
对于
,
是正则无脉冲的。
定义2 如果每个智能体i的状态都满足:
(13)
则称奇异多智能体系统(3)在事件触发机制(7)和控制协议(9)的条件下可以实现领导者跟随一致性。
引理1 [20]
是正则的、无脉冲的和渐近稳定的,当且仅当存在矩阵P使得:
(14)
引理2 (Schur complement)下述线性矩阵不等式
(15)
其中
,等价于以下条件:
1)
,
2)
,
引理3 [21] 对于任意
并且
,满足
。
引理4 [22] 对于
,如果满足
并且
,
,则
。
假设1 通信图
包含有向生成树,并且领导者作为根节点。
假设2 干扰
满足以下条件:
i)
和
是有界的
ii)
注释2 假设1是解决有向网络共识跟踪问题的常见网络假设。由假设2可知,未知外部扰动
是有界的,其导数
,即
假设3
是可控的,
是可观测的,并且
满足:
(16)
注释3由PBH秩判据可知,当且仅当
时,
可控;当且仅当
,
可观测。
4. 主要结果
定理1 假设1~3成立,如果存在矩阵
,
,
,
,
和标量
,
,
,
满足线性矩阵不等式(17)~(18),非线性奇异多智能体系统(3)在事件触发机制(7)和控制协议(9)条件下可实现领导跟随一致性。
(17)
(18)
,
,
。于是
,
,耦合增益
,
反馈增益矩阵
,
,
。
证明:设定跟踪误差
,
为跟踪误差
的估计,
,结合公式(2~3),(6),(9)可得到:
(19)
式(19)经Kronecker积运算得到:
(20)
其中
结合公式(12)得到:
(21)
其中
是一个分块矩阵,满足:
(22)
首先证明
是正则无脉冲的。假设1成立,所以存在矩阵
,满足
,令
,进行计算得到:
(23)
另外计算得到
,其中
,
因为
,
,通过(17)~(18)和引理2,可以得出:
(24)
(25)
意味着
和
,令
得到:
(26)
可以得出,
,因此下式成立。
(27)
由公式(23)和(27),根据引理1,
正则无脉冲。
由定义2可知,误差系统(21)稳定时,即
和
,系统可实现领导跟随一致性。考虑Lyapunov函数为:
(28)
其中
其中
在下文中给出,
的导数为:
根据引理3,得到:
通过Lipschitz条件(4)得到
,则
的导数可以表示为:
(29)
的导数为:
类似地,根据引理3和条件(4)得到:
则
的导数可以表示为:
(30)
的导数为:
根据引理3和条件(4),对于
,不等式化简如下:
(31)
令
是具有合适维度的矩阵。
根据Jensen不等式,可以得到:
结合事件触发机制(7),根据(29)~(31),计算得出:
其中
并且
,根据引理3,
通过(17)~(18)以及公式(29)、(30),得到
,
,因此存在
使得
,
,
,则
。
(32)
因此
根据假设2,
因此,
是有界的,并且
,
是有界的,根据(21),
,
也是有界的。因此,对式(32)两边积分得到:
(33)
根据(33),因为
,得出
。因此,
,
根据引理4得到
且
,完成证明。
注释4 值得注意的是,扩展状态观测器(6)在实现非线性奇异多智能体系统的一致性跟踪方面发挥了重要作用,同时也导致了误差
耦合到跟踪误差系统(21)中。因此,对于(21)的收敛性分析,传统的Lyapunov函数
就不适用了。为了解决这个问题,有必要在Lyapunov函数
的构造中引入
,其中
是一个待确定的正常数。利用
,由定理1推导出跟踪误差系统的渐近稳定性证明,即
且
。
5. 数值仿真
仿真实例的多智能体系统包括6个多智能体,系统拓扑网络见图1,其中0代表领导智能体。
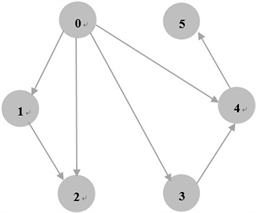
Figure 1. Communication topology of the system
图1. 系统通信拓扑图
示例:领导者系统模型(2)和跟随者系统模型(3)的参数给定如下:
干扰
满足假设2,选择系统的扰动为:
由
计算得出
,选择
,
,解线性矩阵不等式(17)和(18)得到
,通信时延的上限
为0.02。
本例中考虑的网络通信之间的时间延迟是从区间[0, 0.02]中随机选择的。
智能体的初始状态设定为:
图2,图3描述了智能体在不同初始状态下的各个时刻位置状态。由图4可知,随着时间的推移,在控制协议的作用下,在四种不同初始状态时,系统最终实现领导跟随一致。
由图5可知,在基于采样数据事件触发控制下,各个智能本触发次数分别为329次、84次、133次、96次和107次,这组实验数据充分说明事件触发控制策略限定了触发条件,实现了非周期判断性触发。对比周期采样控制(800次),可知事件触发策略可以有效减少触发次数。对硬件而言,控制策略降低了传感器和控制器的状态跟踪变化速率,进而延长硬件的使用寿命。
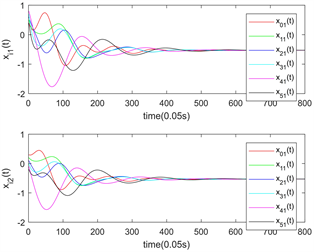
Figure 2. System state trajectories in different initial states
图2. 不同初始状态下系统状态轨迹
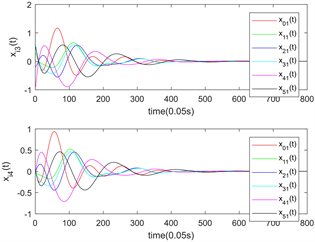
Figure 3. System state trajectories in different initial states
图3. 不同初始状态下系统状态轨迹

Figure 4. System observer error
图4. 系统观测器误差
6. 结论
研究了具有生成树的有向网络上具有未知扰动的Lipschitz非线性奇异多智能体系统的事件触发一致性跟踪控制问题。采用扩展状态观测器和基于采样事件触发控制器,提出了一种分布式一致性协议。该协议旨在解决具有未知干扰的一致性跟踪问题。利用图论、矩阵分析和Lyapunov稳定性理论建立了一致性跟踪控制的理论结果。通过仿真算例验证了该方法的可行性。