1. 引言
脑网络是由大量神经元相互连接而成的复杂结构。这些连接形成了广泛的通信网络,允许神经元之间传递电信号和化学信号,从而实现各种生理和认知功能。因此,研究脑网络对我们认识不同网络功能障碍在神经异常和神经障碍中所起的作用提供了新的见解。Cohen-Grossberg型神经网络(CGNN)是Cohen和Grossberg首次在 [1] 中提出的一种神经网络,在保密通信,模型识别,优化问题等领域有广泛应用 [2] [3] 。它同时也是用于描述神经元之间相互作用和信息处理的数学模型,对脑网络功能的实现不可或缺。由于信息处理的切换速度有限,在研究神经网络稳定性,收敛性等特性的过程中,时间延迟尤其是时变延迟是不可避免的,因此在神经网络的建模中应该考虑时变时滞 [4] [5] [6] 。
如果复杂网络中各个节点的动态都相同,那么称这样的网络为同构网络。但相比同构网络,异构网络即网络中的节点具有不同的动态,更能代表一般情况。以生态群落中捕食者–猎物的相互作用为例,捕食者和猎物相互影响彼此的进化,每个个体的行为和另一个个体总是不同。此外,捕食者群落的拓扑结构与被捕食者群落的拓扑结构也不同 [7] 。
同步是许多复杂网络中一种典型的集体行为。它关注的是网络中每个节点达到相同稳态的一致行为。直到最近几年,人们的兴趣才转向多层网络的同步 [8] 。根据同步方式的不同可分为完全同步,指数同步,聚类同步,反同步,混合同步等 [9] [10] [11] [12] 。在许多实际问题中,完全同步以难实现。例如,在人类疾病网络中,疾病层和人类层无法实现完全同步。然而,疾病可以和宿主实现和谐共存,这种现象被称为“广义同步” [13] [14] [15] 。广义同步在工程网络,生物系统,社会活动和许多其他领域发挥了重要作用。现实世界中的大量现象暗示着广义同步的出现。
广义同步是完全同步的扩展,它意味着响应系统的状态通过非线性光滑的函数映射与驱动系统的状态同步,但是在现实操作中,该映射是难以寻找的。因此,我们可以用辅助系统方法来巧妙地避开这一难题,当响应系统与辅助系统达到完全同步时,对于任意初始状态不同于辅助系统的响应系统,响应系统将和驱动系统到达广义同步。目前,辅助系统方法已经在实际应用中取得了一定成果,例如,Abarbanel H D I等人用辅助系统方法检测电路之间的混沌同步,展示了电路同步和非同步运动的现象 [4] 。
通常,很多注意力都集中在网络内部的同步上,这被称为“内部同步”。除了内部同步之外,我们还可以观察到复杂网络的其他类型的同步行为,比如两个耦合网络之间的“外部同步”,即无论内部网络是否同步,耦合网络的对应节点都将实现同步。这种现象跨越了多个领域,从果蝇时钟神经元群体之间的集体行为,到生态学中捕食者–猎物群落之间的平衡,再到研究人员网络和教育工作者网络之间的拥塞。最近,人们报道了各种外部同步现象,包括完全外部同步(COS)、自适应外部同步(AOS)、逆外部同步(IOS)和广义外部同步(GOS)。在当前的工作中,我们提出了一种新的外部同步行为,即混合外部同步(MOS)。Wang等 [16] 研究了具有相同拓扑结构和耦合延迟的两个复杂网络之间的混合外部同步。Zheng等 [17] 通过具有脉冲控制效应的自适应反馈控制,分析了两个拓扑结构和输出耦合不相同的复杂网络之间的混合外同步。
此外,在实际工程中,我们感兴趣的是在固定有限时间内的有界同步。因此,引入了有限时间稳定性或同步的概念。存在两个有限时间稳定性和同步的概念。第一个概念是指在初始条件下,对于给定的边界,系统的状态在固定的时间间隔内保持在规定的边界内,这也称为有限时间有界性。第二个概念指系统在有限时间内趋于0。复杂网络的有限时间有界性在实际生活中应用广泛,例如,电网无法实现完全同步,因此希望在给定范围内获得条件,使发动机之间的转子相位差保持不变 [18] 。近年来,复杂动态网络的有界控制发展非常迅速,是控制理论和应用中的重要问题之一 [6] 。在现有的研究结果中,大部分的同步都是定义在无限时间上的,然而,研究CGNN型神经网络的有限时间同步更有意义,也更合理。据我们了解,关于CGNN网络的有限时间稳定性或同步的研究很少。在本文中我们研究有关具有时变时滞的CGNN网络的有限时间混合外同步,填补了这一方面的空白。
本文研究了一类具有时变时滞的Cohen-Grossberg型神经网络的指数同步和有限时间混合外同步问题。本文的创新点在于:
(1) 提出的模型更具有一般性。相比于文献 [8] ,本文研究了两层异构神经网络,更具有普遍性。同时利用了辅助系统方法,将证明驱动–响应系统广义同步这一复杂抽象的问题转化为证明响应–辅助系统的完全同步,使问题的解决变得可行,提供了一种新的研究思路。
(2) 基于李雅普诺夫稳定性理论,研究了具有时变时滞的Cohen-Grossberg型神经网络的指数同步,推导了该网络的指数同步的充分条件。
(3) 利用线性矩阵不等式研究有限时间混合外同步,推导了上述网络有限时间混合外同步的新的稳定性判据。
本文结构如下:第1节介绍了Cohen-Grossberg型神经网络模型,指数同步与有限时间混合外同步的定义,假设和引理。第2节基于李雅普诺夫理论和同步定义,在理论上证明了指数同步和有限时间混合外同步。作为特例,给出了延迟细胞神经网络同步的几个充分条件。第3节通过几个数值例子证明了结论的有效性和可行性。最后,我们在第4节对全文进行总结。
符号说明:
表示n维欧氏空间。
是所有
阶实矩阵。
表示矩阵A的转置。
代表
相对于时间t的导数。给定向量
,
表示x的范数。
,
表示以e为底的指数。
2. 网络模型的建立
考虑一类具有时变时滞的Cohen-Grossberg神经网络,其动力学方程为
. (1)
其中
,
表示神经网络中节点的数目,
表示第i个神经元在时刻t的状态变量。
表示放大函数,
是一个适当的函数,
,
表示第j个神经元与第i个神经元的连接强度。
和
表示第j个神经元在时刻t和
的输出,
表示时间延迟,并且满足
,
,
是来自网络外部的输入。
本文将(1)作为驱动系统,对应的响应系统描述如下
(2)
其中
,
为反馈增益,
是一个变换。
则辅助系统为
(3)
定义1 [5] 对于系统(2)和系统(3),如果存在
,
使得
,
.
其中
,则称系统(2)和(3)实现指数同步。
定义2 [19] 响应系统(2)和辅助系统(3)被认为是相对于
实现了有限时间混合外同步,如果对于
,
有
.
其中
,且
。
定义3 [20] [21] 对于驱动系统和响应系统的解
和
,如果存在映射
,使得
,
则说明驱动系统和响应系统达到了广义同步。设广义同步误差系统
,如果存在一个时间常量
,使得
,且当
时有
,则称驱动系统和响应系统关于向量函数
在T时刻达到有限时间广义同步,其中T称为同步时间。
假设1 [22]
是一个可微函数,存在正数
,
,使得
,
。
假设2 [23] 非线性函数
满足全局Lipschitz条件,即存在一个常数
,使得
.
假设3 [24] 存在常数
,使得
,
,
.
假设4 [25] 对于
,函数
满足全局Lipschitz条件,即存在常数
,有
.
假设5 [26] 对于函数
,存在
,使得
.
其中
,且
。
假设6
是一个有界函数,即存在正数
,使得
。
引理1 [19] (柯西不等式)对于任意对称正定矩阵
和
,有
.
3. 主要结果
对于响应系统与辅助系统,本文定义误差向量
,根据(2)~(3)式,同步误差动力学为
(4)
3.1. Cohen-Grossberg神经网络的指数同步
定理1:在假设1~3和假设5的条件下,响应系统(2)和辅助系统(3)实现指数同步,由辅助系统方法可知驱动系统(1)和响应系统(2)实现广义同步,如果存在正数
,且满足
,
.
其中
。
证明:设Lyapunov函数为
.
将
沿误差系统关于时间t求导得
由假设5知
.
由假设1和假设2知
根据假设3与假设6可得
由引理1知
其中
。所以对任意的
,有
其中
,
,故
。因此系统(2)和(3)实现指数同步,由辅助系统方法和定义3可知系统(1)和(2)实现广义同步。
3.2. Cohen-Grossberg神经网络的有限时间混合外同步
定理2:对于给定的标量
,在假设1~5的条件下,响应系统(2)和辅助系统(3)可以实现相对于
的有限时间混合外同步。由辅助系统方法可知驱动系统(1)和响应系统(2)实现广义同步如果存在控制增益常数
,
,
,
,使得以下成立
,
,
.
其中
。
证明:设Lyapunov函数为
.
将
沿着局部误差系统关于时间t求导得
.
.
由假设5可得
.
由假设1、2和引理1得到
.
由假设3、4可知
.
由引理1得到
.
综上所述,
则当
时,
。
其中
。
注意到
.
根据
,
即
.
又
,
其中
。
则有
.
上式左右分别乘
,并从0到t积分,
,则有
.
由于
.
因此,
.
由定理2知,对于所有的
,存在
.
于是,响应系统(2)和辅助系统(3)相对于
(
)实现了有限时间混合外同步,由辅助系统方法以及定义3可知系统(1)和(2)实现有限时间广义同步。
如果放大函数
,则驱动系统(1)变为
. (5)
响应系统(2)与辅助系统(3)分别变为
(6)
(7)
根据定理1可得以下推论:
推论1:在假设1~3和假设5的条件下,系统(6)与系统(7)实现指数同步,如果
,
.
其中
。
推论2:对于给定的标量
,在假设5~10的条件下,系统(6)和系统(7)可以实现相对于
(
)的有限时间混合外同步。如果存在控制增益常数
,
,
,
,使得以下成立
,
,
.
其中
。
4. 数值仿真
考虑下面的具有时变时滞Cohen-Grossberg型神经网络
(8)
其中
。
辅助系统描述为
(9)
4.1. Cohen-Grossberg神经网络的指数同步数值仿真
为了验证定理一结论的正确性,令
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
。
所以,可以得到,对于
,有
,
,
另一方面,对于任意的
,
,有
.
从而
。同理可得
,
,
,
。
经过计算得到
并且
.
进一步可得
,
,
,
,
,
,
,
.
选择
,
,
,
,
,
,
,
,
,
,
,
,
,
。通过计算得到
.
.
.
.
.
.
.
.
.
.
在定理1的条件下,(8)和(9)是指数同步的,同步误差
的时间演化如图1和图2所示。因此,由辅助系统方法知驱动系统(1)和响应系统(2)实现广义同步。
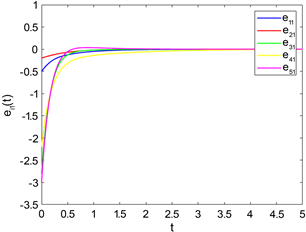
Figure 1. Synchronization error
图1. 同步误差

Figure 2. Synchronization error
图2. 同步误差
4.2. Cohen-Grossberg神经网络的有限时间混合外同步数值仿真
为了验证定理2结论的正确性,本文依然选择选择5维的CGNN,其中
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
。
所以,我们可以得到:
并且
.
进一步可得
,
,
,
,
,
,
,
。
将
,
,
,
,
,
,
,
,
,
作为系统的初值,其中,
。
令
,
,
,利用MATLAB中的LMI控制工具箱对定理2中的LMI进行求解,得到一组可行解:
,
,
,
,
,令
,
。
,
,
,
,
,
,
,
,
,
。
因此,响应网络(2)与辅助网络(3)可以实现相对于
的有限时间混合外同步,数值模拟如图所示
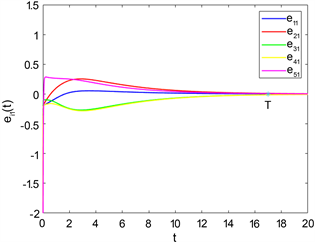
Figure 3. Synchronization error
图3. 同步误差

Figure 4. Synchronization error
图4. 同步误差
采用欧拉法进行数值模拟,从图3和图4中不难看出,误差系统可以渐近收敛于零,这意味着响应系统(2)和辅助系统(3)已经实现了有限时间混合外同步。在图3和图4中,我们注意到,响应系统(2)和辅助系统(3)具有快速完美地实现了关于
的有限时间混合外同步,有限时间混合外同步的时间T约为17 s。
5. 结论
本文针对Cohen-Grossberg型神经网络,考虑时变时滞因素,研究其实现广义同步问题。为了得到响应系统和辅助系统实现指数同步的充分条件,基于李雅普诺夫稳定性理论,构造李雅普诺夫函数,从理论上证明了两层网络同步。再结合线性矩阵不等式,得到了响应系统和辅助系统有限时间混合外同步的充分条件,最后通过数值仿真验证了理论的有效性和可行性。此外,本文研究的主要是线性系统问题,在未来的工作中,我们将研究非线性系统的广义同步问题。
基金项目
省级大学生创新训练项目(S202310446045)。
NOTES
*第一作者。
#通讯作者。