1. 引言
随着现代工业的发展,包装行业在生产效率和产品质量方面面临着越来越高的要求。糖果包装机作为各类包装流水线中的重要组成之一,其包装机构的性能和效率直接影响到整个包装过程的顺利进行 [1] 。在其包装机构中,轴上摆臂是一种重要的部件,它承担着支撑、传动和定位等多重功能,因此其结构设计对于糖果包装机的性能具有重要的影响 [2] 。传统的轴上摆臂结构设计主要基于经验和直觉,缺乏针对性的优化 [3] 。然而,随着计算机辅助设计和仿真技术的快速发展,结构优化方法在机械领域中得到了广泛应用 [4] 。结构优化的目标是通过调整材料分布或几何形状,使得结构在给定的约束条件下达到最佳的性能。通过拓扑优化设计,可以实现轴上摆臂的轻量化、刚度提升和疲劳寿命延长等多重目标 [5] 。
2. 有限元模型建立
2.1. 建模
根据糖果包装机轴上摆臂的结构数据,在SolidWorks三维建模软件中对摆臂进行三维建模。在建模过程中,除了保留摆臂本来的机械性能与结构特征,将摆臂与螺栓连接的螺纹孔简化成直通孔,以便于进行后续的有限元分析,完成摆臂简化模型的建立后,再将STEP格式的模型文件导入Workbench中。摆臂的实体模型如图1所示。

Figure 1. Finite element model of Swing arm
图1. 摆臂有限元模型
2.2. 定义材料属性
在导入模型后,设置铝合金为摆臂的结构材料,结构钢为圆柱销及螺栓的结构材料。铝合金及结构钢的具体参数属性值如表1所示。
2.3. 网格划分
完成材料属性的设置后,再对模型进行网格划分,网格大小为3 mm,模型网格化后的节点数为73,921,单元数为47,803。网格化后的模型如图2所示。
3. 摆臂的静力学结构分析
静力学结构分析是一种通过模拟和评估结构在静止状态下的行为和响应来进行工程分析的方法,可用于验证和评估设计的结构的性能和可靠性。通过应力和变形分析,可以确定结构在给定加载条件下的响应,以确保结构的安全性和合理性。
3.1. 施加约束及载荷
基于实际工况,对摆臂中与轴连接的环面施加圆柱面约束,对轴与摆臂键连接的一个平面施加压力,对圆柱销与二级连杆连接的紧定螺钉处施加线应力,并对两处螺栓分别施加螺栓预紧力。具体约束及载荷的施加情况如图3所示。
3.2. 应力应变分析
在所有的前处理完成后,即可对模型的结构应变云图(Total Deformation)和结构应力云图(Equivalent Stress)进行求解,求解结果如图4和图5所示。根据对应变应力云图的分析可知,结构的最大位移为0.0034 mm,发生在摆臂极耳的顶端位置,此最大位移较小,并不会影响结构的正常运行;结构的最大应力为21.936 MPa,发生在圆柱销与二级连杆紧定螺钉的连接处,此最大应力远低于材料的屈服强度,并不会影响结构的正常运行;因此结构在此载荷工况下,能够安全稳定运行 [6] 。
4. 摆臂的模态分析
模态分析是一种结构动力学分析方法,用于研究物体的固有振动特性。它主要关注结构在没有外界激励下的自由振动行为,即结构的固有振动模态。模态分析在工程领域有广泛的应用,特别是在结构设计、动态响应分析和结构健康监测等方面。它可以帮助工程师了解结构的固有特性,预测结构在自由振动状态下的响应,并评估结构的耐久性和安全性。在模态分析中,通过对结构进行数学建模,可以得到结构的固有频率、振型和阻尼等信息。这些信息对于设计和分析结构的动态响应以及结构的可靠性评估有着重要的帮助。
摆臂作为包装机上主轴和二级连杆的连接结构,它对整个机构的运转起着承上启下的作用,该结构受到交变应力和外部激励振动的影响 [7] ,可能会导致其发生破坏,现对摆臂模型进行6阶模态分析,分析结果如表2所示,各阶振型如图6所示。

Table 2. Results of swing arm modal analysis
表2. 摆臂模态分析结果
根据对各阶振型图的分析可知,第一阶振型主要表现为摆臂沿主轴轴向的弯曲模态;第二阶振型主要表现为摆臂沿主轴径向的弯曲模态;第三阶振型主要表现为摆臂前端的扭转模态;第四阶振型主要表现为摆臂中端的弯曲模态;第五阶振型主要表现为摆臂前端极耳处的弯曲模态;第六阶振型主要表现为摆臂与二级连杆相连接的圆柱销处的弯曲模态。前两阶固有频率都较稳定,在2300~2400 Hz之间,第三阶固有频率为6871.8 Hz,第四阶至第五阶固有频率集中表现在8000~8500 Hz之间,第六阶固有频率为11,437 Hz。综上所述,在不同的振型下摆臂表现出的模态都不尽相同,随着各阶模态的增加,摆臂的变形区域和变形程度也在增加,变形形式也更为复杂,但总体固有频率稳定在2300~12,000 Hz之间,低于包装机械的外在激励频率,由此可以判断很难发生内外共振,能够保障机构的正常运行 [8] 。
5. 摆臂的拓扑优化
拓扑优化是一种工程设计方法,旨在优化结构的拓扑形状,以满足给定的设计要求和约束。它通过自动调整结构的拓扑分布,以最小化特定目标函数(例如最小化重量、最大化刚度或最小化应力)来实现优化设计 [9] 。
5.1. 拓扑优化及模型重构
首先对模型建立优化任务,选择模型所有的外表面除了极耳处的表面和螺栓孔面作为拓扑优化区域,具体见图7中蓝色区域,模型其它区域作为非拓扑优化区域,具体见图7中红色区域;再建立最小应变能目标函数和响应约束为50%的质量优化目标,从而对摆臂模型进行拓扑优化 [10] 。
在经过19次迭代后得到的拓扑优化结果如图8所示。根据拓扑优化结果对摆臂模型进行重构,对模型两侧中部进行部分材料剖除,对模型底部环轴面外侧去除部分材料,并将模型原本的螺栓与模型螺纹孔连接更换为螺栓螺母连接,重构后的摆臂模型如图9所示。
5.2. 重构模型分析
为了验证根据拓扑优化结果重构后模型的可靠性,在相同模型材料及工况的条件下,对重构模型进行静力学结构应力应变分析 [11] ,分析结果如图10~11所示。
对重构模型应力应变云图的分析可知,重构模型的最大位移为0.0056 mm,发生在摆臂极耳的顶端位置,此最大位移较小,并不会影响结构的正常运行;重构模型的最大应力为17.938 MPa,发生在圆柱销与二级连杆紧定螺钉的连接处,此最大应力远低于材料的屈服强度,并不会影响结构的正常运行;因此重构模型在相同的模型材料及工况的条件下,同样能够安全稳定运行。
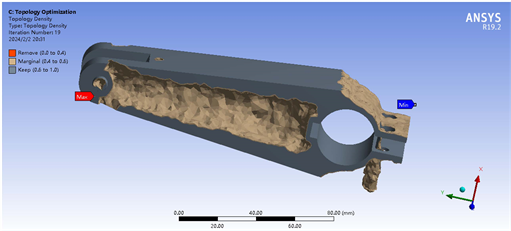
Figure 8. Topological optimization model diagram
图8. 拓扑优化后模型图
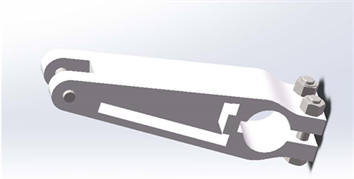
Figure 9. Reconstruction model of swing arm
图9. 摆臂重构模型图
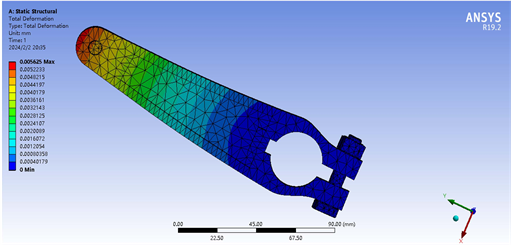
Figure 10. Reconstruct the model strain contour diagram
图10. 重构模型应变云图
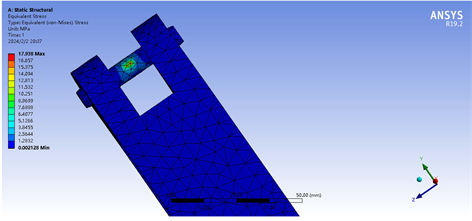
Figure 11. Reconstruct the model stress contour diagram
图11. 重构模型应力云图
5.3. 摆臂模型重构前后结果对比分析
Table 3. Comparison of the results before and after the reconstruction of the swing arm model
表3. 摆臂模型重构前后结果对比
由表3可知,摆臂模型重构前后最大位移由0.0034262 mm变为0.005625 mm,最大应力由21.936 MPa变为17.938 MPa,质量由0.214 kg变为0.129 kg。在相同的模型材料及工况的条件下,摆臂质量减少了39.72%,而最大位移和最大应力的变化都在安全使用的范围内,因此不仅有效实现了轻量化设计的目的,同时还保证了轻量化设计后摆臂使用的可靠性及安全性。通过本文的研究,希望能为糖果包装机轴上摆臂的拓扑优化设计提供一种新的思路和方法,能为包装行业的发展和进步做出贡献。