1. 前言
风洞试验是发现和探索相关目标空气动力学机理和了解流动规律的重要手段,而风洞应变天平又是风洞试验中不可或缺的重要测量装置。针对风洞应变式天平的研究受到研究人员的广泛关注 [1] [2] [3] [4] [5] 。田正波等人开展应变天平开槽对天平性能的影响研究发现圆弧型开槽能够明显改善天平测力性能 [1] 。焦园圆设计一款新型航空盒式六分量天平并对该天平进行了解耦分析,完成了天平的灵敏度分析和应力校核 [2] 。于常安等人研制了一种新型并且最终指标满足设计要求的结构紧凑型六分量盒式天平 [3] 。车兵辉、汪运鹏和聂少军等人针对风洞天平传统线性回归标定方法的缺陷采用神经网络的方式进行校准研究,结果表明采用神经网络的方法能够显著提高天平拟合的精度 [3] [4] [5] 。汽车风洞天平最主要的作用就是获得模型或实车上的气动载荷。近些年来国内相继建设数座高水平汽车气动声学风洞,但是鲜有人从事汽车风洞天平的相关细致研究(上文所述相关研究工作皆针对航空应变式风洞天平),相关方向的技术探索也存在相应空白。
本文开展汽车风洞天平设计与校准方法研究,认知汽车风洞天平的工作原理、熟悉汽车风洞天平的结构特点、明确汽车风洞天平的关键技术、掌握汽车风洞天平的设计与校准方法,为开展汽车风洞天平设备的建设与使用奠定技术基础 [6] ,也为后续开展汽车风洞天平解耦和校准方向的其他研究提供借鉴参考。
汽车风洞天平具有结构精密、系统复杂、载荷跨度大、测量精准度高等特点,是气动声学风洞测力试验系统的核心设备 [7] 。为实现知原理、懂设计、会校准、能维护等目标,通过对汽车风洞天平的工作原理、系统组成、机械结构和静态校准等内容的系统梳理,掌握了汽车风洞天平的规范化设计流程。聚焦汽车风洞天平设计的关键技术问题:机械解耦和测量精准度,应用ANSYS软件对弹性机械连杆与拉压传感器结构开展力学性能仿真,对力的传递、分解、耦合作用充分解析,将汽车风洞天平的具体设计工作梳理透彻 [8] 。
本论文具体阐述三部分内容,一是汽车风洞天平的系统组成与工作原理;二是汽车风洞天平的设计与校准;三是汽车风洞天平机械解耦与校准误差。
2. 汽车风洞天平的系统组成与工作原理
汽车风洞天平属于应变天平,其系统组成包括浮动框、弹性连杆、拉压传感器、固定框(如图1所示),此外,天平系统还包括数据采集与处理系统和天平校准相关设备 [9] 。
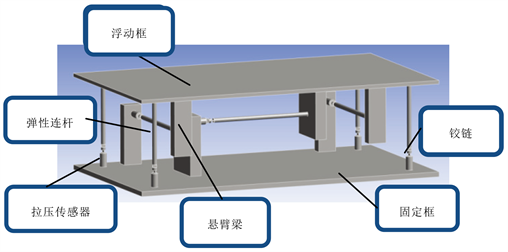
Figure 1. Automotive wind tunnel balance composition diagram
图1. 汽车风洞天平系统组成示意图
固定框上布置七个悬臂梁结构测量元件,每个测量元件通过弹性连杆与浮动框相连 [10] 。弹性连杆在Z方向布置四根,Y方向两根,X方向一根,每根弹性连杆上均固连一个柱式拉压力传感器(如图2所示)。
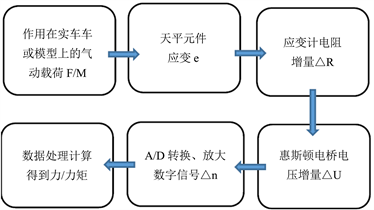
Figure 3. Working principle of automotive wind tunnel balance
图3. 汽车风洞天平工作原理图
汽车风洞天平可以在体轴坐标系中同时测量作用在实车(或模型)上的空气动力载荷,相关载荷通过弹性连杆传递到测量元件导致其产生变形(应变与力的大小成正比)。传感器测量元件的电阻大小由于其受力变形发生变化,该电阻阻值的变化导致惠斯顿全桥电路产生电压信号的改变,此电压信号经过信号放大并经A/D转换成数字信号被采集器采集存储。通过数据处理,将数据代入天平校准公式计算就能获得作用在实车(或模型)上的力与力矩 [11] 。其具体工作原理如图3所示。
3. 汽车风洞天平的设计与校准
3.1. 汽车风洞天平的设计条件
参考某汽车风洞天平技术需求,将天平量程、准度、重复性精度作为基本设计条件,具体参数见表1。

Table 1. Balance parameters and indicators
表1. 主天平参数与指标
3.2. 汽车风洞天平的设计内容
汽车风洞天平设计内容包括天平机械结构设计、测量单元设计和静态校准设计。
3.2.1. 天平机械结构设计
根据试验车辆的大小确认天平浮动框和固定框轮廓尺寸并依照天平载荷确认弹性连杆特征尺寸。固定框与地面固连,为整个天平提供稳定支撑。浮动框和固定框要求具有足够的强度和刚度 [12] 。
1) 传感器载荷计算
在风洞试验中,实车受到的气动载荷通过弹性连杆传递到天平测量单元。其中,Z方向的四根弹性连杆传递的是法向力FZ、俯仰力矩MY和滚转力矩MX;Y方向的两根弹性连杆传递的是侧力FY、横摆力矩Mz和滚转力矩Mx;X方向的一根弹性连杆传递的是阻力FX与俯仰力矩My。在实际使用中,天平浮动端感受的六个空气动力分量全部由七根弹性连杆传递到各自的拉压传感器上,由此可以确认这七根弹性连杆和与连杆对应的拉压传感器受力大小各不相同。为计算在某载荷作用下每个拉压传感器的受力大小,构建汽车风洞天平体轴坐标系,首先需明确Z方向四个拉压传感器位置,从而可以确定天平的总体尺寸。接下来布置Y方向和X方向拉压传感器位置,原则是这三个传感器中心点Z轴坐标一致 [13] 。以这三个传感器中心点所在平面为天平体轴坐标系参考平面,将该平面中心点为天平体轴坐标系坐标参考点,以天平的X方向和Y方向特征尺寸为依据计算各传感器中心点坐标,能够确定天平绕不同坐标轴力矩对应力臂的特征尺寸(如图4所示)。
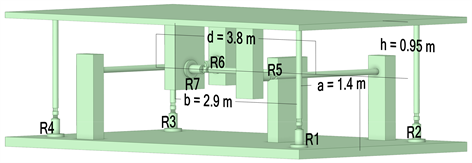
Figure 4. Characteristic dimensions of balance lever
图4. 天平力臂特征尺寸
作用在天平各测量元件上的载荷分配关系为:
(1)
上式中力矩对应的力臂h、a、b和d分别表示传感器R5、R6和R7所在平面到浮动端表面的距离、R1~R4传感器到X——平面的距离、R1~R4传感器到Y——平面的距离和R5与R6之间的距离,具体的取值为h = 0.95 m,a = 1.4 m,b = 2.9 m,d = 3.8 m。各传感器最大载荷通过如下矩阵关系式计算 [14] :
(2)
将天平气动载荷量程Fz = 5000 N,Fx = 5000 N,My = 5000 N,Fy = 5000 N,Mz = 5000 N,Mx = 5000 N代入矩阵方程(2)得到FRz1 = 3013 N,FRz2 = 2970 N,FRz3 = 513 N,FRz4 = 470 N,FRy1 = −3816 N,FRy2 = 1185 N,FRx = 5000 N。
2) 受力部件材料选择
汽车风洞天平作为一种高精度的测量仪器,天平材料一般选用高强度的低碳合金钢,主要有优质铬锰硅合金钢、沉淀硬化不锈钢与马氏体时效钢。目前普遍采用F141 (00Ni18Co8Mo5TiAl)和17-4PH (Cr17Ni4Cu4Nb)两种马氏体时效钢作为天平材料 [15] ,材料特性如表2所示。
Table 2. Wind tunnel balance materials and mechanical properties
表2. 风洞天平材料及力学特性
3.2.2. 测量单元设计
天平测量单元由拉压传感器、信号放大器、信号采集器、A/D转换器、数据存储器、数据处理软件 [16] (如图5所示)。该部分内容的核心工作是拉压传感器的选择,以天平分辨率、重复性精度、测量准度和载荷量程为依据,选择满足指标需求的拉压传感器型号,匹配数据采集系统。
3.2.3. 静态校准设计
天平静态校准选择单分力加载,各分量加载设计值如表3所示。
Table 3. Single force loading data
表3. 单分力加载数据表
依据天平测力试验实际物理场景,单分力加载设计阻力单元只加载阻力正方向,侧向力、法向力和力矩都加载了两个方向。系数矩阵构建过程如下,通过单分力加载,将某分力施加载荷与传感器测量载荷数据分别拟合,天平六分量一次项系数校准曲线如下。
图6表明,R7为阻力测量单元,主项系数为0.99888,干扰项系数很小。
图7表明,R5、R6为侧力测量单元,主项系数为分别为−0.99857和0.99782,干扰项系数很小。
图8表明,R1、R2、R3、R4为法向力测量单元,主项系数为分别为−1.00204、−1.00201、−1.00181、和−1.00184,干扰项系数很小。
图9表明,Mx与法向力和侧向力关联,主项系数为分别为1.67326、1.67381、−1.67232、−1.67286、1.30686、−1.30686,干扰项系数很小。
图10表明,My与法向力和轴向力关联,主项系数为分别为−2.37927、2.38004、2.37876、−2.38069和−1.38950,干扰项系数很小。
图11表明,Mz与侧向力关联,主项系数为分别为−2.26543、−2.26201,干扰项系数很小。
得到一次项系数校准矩阵(6 × 7),结果如(3)所示:
(3)
得到二次项系数校准矩阵(6 × 35),结果如(4)所示:
(4)
由于天平准度与重复性精度要求高,精细化校准是决定性环节。依据工程经验,天平校准矩阵需要包含一次项系数矩阵和二次项系数矩阵,天平各分量计算表达式如(5)式所示。
(5)
4. 机械解耦与校准误差
4.1. 机械解耦
机械解耦是汽车风洞天平设计过程中必须解决的关键技术问题。多分量天平在使用时各分量之间会出现不同程度的相互干扰。为弱化干扰,使用特殊结构形式的弹性连杆(如图12所示),实现测量单元只对测量分量的载荷敏感,而对其他分量的载荷不敏感。弹性连杆连接传感器的一端设置有双向弹性铰链,侧向与法向自由度的作用是排除侧向与法向力的干扰,使弹性连杆只传递轴向的拉力或压力,由此产生的结果是每一根弹性连杆只将其轴向的力传递给拉压传感器,起到力的解耦作用 [17] 。
应用ANSYS软件对汽车风洞天平的机械结构进行有限元分析(如图13、图14所示),将天平最大设计载荷作为力源,通过单分量加载模式输入到天平浮动端。提取测量单元拉压传感器的应力。采用在相同力源作用下,拉压传感器安装十字弹性铰链与不安装弹性铰链两种模式的力学特性对比,验证弹性铰链的解耦效果。仿真算例设置中天平网格量为370万,在固定框底部四条边线上添加固定约束,并在天平浮动框上施加六分量的载荷。仿真计算结果如表4所示(上标“W”表示无铰链),分别给天平各分量施加最大载荷,表中给出了测量单元的传感器应力最大值。对比相同传感器在连接十字铰链和不连接十字铰链两种状态下的最大应力结果,可以明显看出十字铰链弹性连杆解耦效果明显。
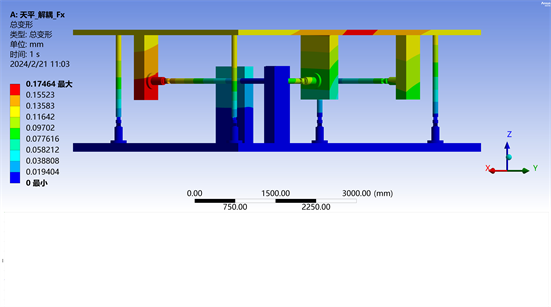
Figure 13. Simulation of the mechanical properties of the cross hinge elastic connecting rod
图13. 十字铰链弹性连杆力学特性仿真
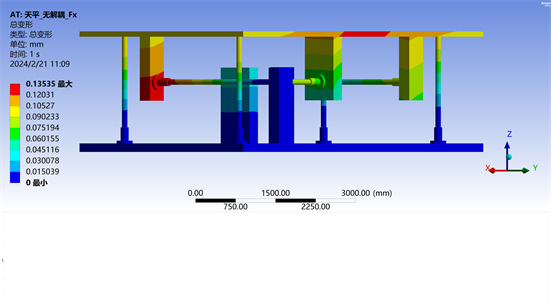
Figure 14. Simulation of the mechanical properties of hingeless connecting rod
图14. 无铰链连杆力学特性仿真
Table 4. Comparison of mechanical decoupling effect of elastic connecting rod (Unit: Mpa)
表4. 弹性连杆机械解耦效果对比(单位:Mpa)
4.2. 校准误差
汽车风洞天平的机械结构、弹性连杆以及测量单元传感器等硬件决定了天平的基本性能,在硬件条件确定的情况下,校准矩阵是天平测量准度的决定性因素。校准矩阵包括一次项系数矩阵和二次项系数矩阵。图15展示了天平最终实现的精度与天平设计要求的精度,结果表明天平最终精度满足设计指标。
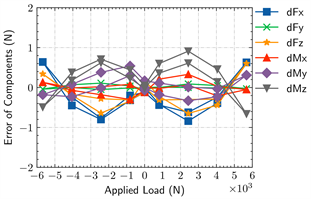
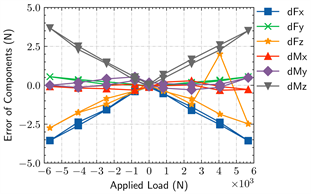
如果天平机械解耦效果达到理想预期,理论上使用一次项校准矩阵计算就能得到满足测量准度需求的结果。为考核本设计案例的机械解耦效果,专门对比了应用完整校准矩阵(包括一次项和二次项系数)与只考虑一次项的校准矩阵对天平精度的影响。以单独加载Mz时为例,图16给出了不考虑二次项系数和考虑二次项系数的校准误差曲线。图17给出了二次项系数对测量误差的影响曲线。结果表明,在机械解耦效果明显的条件下,二次项系数对天平测量结果影响较大,天平校准矩阵必须使用一次项系数和二次项系数相结合的模式。
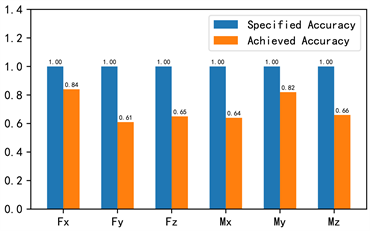
Figure 15. Balance final accuracy and design requirement accuracy
图15. 天平最终精度与设计要求精度
 (a) (b)
(a) (b)
Figure 16. Balance calibration error. (a) Not considering quadratic interference; (b) Considering quadratic interference
图16. 天平校准误差。(a) 不考虑二次干扰项;(b) 考虑二次干扰项
5. 结论
本文分析了风洞应变式天平的研究现状,针对国内汽车风洞应变式天平领域内的相关空白展开研究。此次研究系统梳理了汽车风洞天平的系统组成与工作原理,初步掌握了其设计流程与校准方法。
应用PYTHON编程,计算并优化了天平输入载荷与各传感器上输出载荷的关系,明确了传感器选择依据,并应用ANSYS软件仿真解析了弹性连杆的结构形式与解耦效果,校准结果与仿真分析结果一致,弹性连杆解耦效果符合预期目标。
参考某天平校准数据,完整解析了天平各分量测量准度,结果表明该设计案例完全满足需求指标。本文相关研究工作为天平建设提供了一定参考依据,也为后续汽车风洞天平相关方向的具体研究提供借鉴。
NOTES
*通讯作者。