1. 引言
近几十年来,变点探测问题一直是统计学中的一个热门话题。如今它不仅被广泛应用于工业质量控制 [1] ,还被广泛应用于经济 [2] 、金融 [3] 、医学 [4] 等领域。许多学者对变点探测问题进行了研究。例如,Picard [5] 研究了自回归AR模型变点的最大似然估计。Bai [6] 对最小二乘估计线性回归模型的多变点问题进行了深入探索。Kokoszka和Leipus [7] 研究了自回归条件异方差(ARCH)模型中单变点检测的相关问题。Liu [8] 提出了一个新的经验似然比统计量来检验无变点的零假设。Foygel和Drton [9] 基于群LASSO法,解决了数据稀疏条件下线性回归模型的变点问题。Hudecová,Hušková和Meintanis [10] 研究了INARCH模型中的变点探测问题。Chen和Lee [11] [12] 提出了一种贝叶斯方法来检测广义泊松INGARCH模型中的变点。Pein和Sieling [13] 提出了一种H-SMUCE的统计量,用于检测异质高斯回归模型中信号的多个变点问题。Lee [14] 利用支持向量回归(SVR)-自回归移动平均(ARMA)模型获得的残差,考虑了基于位置和尺度的CUSUM检验的时间序列变点检验问题。Lee和Kim [15] 重点介绍了整数值自回归(INAR)和INGARCH模型的CUSUM检验和整数值时间序列模型变点检验的最新进展。
在时间维度上,计数过程体现在生产生活各方面,比如一个城市在数月内道路交通事故发生次数、一家医院某种传染疾病每天的感染人数、商场中销售的某个商品数量、某只股票每天价格变动的次数、某一地区的犯罪数量和某个国家新增的失业人数等等。取值非负整数和有一定的自相关性是这种数据的两个明显的特点。而对于这类数据,如果用广义自回归条件异方差模型(GARCH)来拟合,效果不好。虽然这个模型可用来拟合有自相关关系的数据,但这个模型是在实数域基础上而非整数域,故对于这种数据,用整数值时间序列模型进行拟合要更好一些。近三十年来,许多整数值时间序列模型应时而生,其应用前景也越来越广阔。比如为描述癫痫患者的发作次数,Franke和Seligmann [16] 提出自激励门限自回归模型、Gauthier和Latour [17] 提出的广义整数值自回归模型等等。本文研究的整数值时间序列模型分别是由Ferland [18] 提出的泊松INGARCH模型,Fokianos和Tjøstheim [19] 提出对数线性泊松INGARCH模型。
变点探测常用的方法是通过优化特定的目标函数来寻找变点,如最小二乘法 [20] 和贝叶斯方法 [21] 。为了避免优化问题,BS方法 [22] 是一种流行的解决方案。此外,还有Davis等人 [23] 提出的遗传算法、Killic等人 [24] 提出的Pruned Exact Linear Time (PELT)方法和Yau等人 [25] 提出的LRSM。相比较于BS和PELT,LRSM不仅将计算难度从n2降低到
,且提高了变点估计的准确性。目前,据我们所知,LRSM还没有运用到整数值时间序列的变点探测中。
本文的梗概如下。第2节中,我们将详细介绍基于LRSM在分段平稳过程中估计多个变点的三个步骤。第3节讨论了窗口半径的选取问题。第4节对LRSM进行了大量的模拟研究。通过对不同模型的重复试验,深入研究了LRSM的变点探测性能。第5节研究了LRSM在实际生活中的应用。第6节为对全篇内容做出总结,概述本论文所做的工作。
2. INGARCH模型以及似然比扫描方法
2.1. 泊松INGARCH模型
拟合整数值时间序列,其中最为经典的就是用Ferland等(2006) [18] 提出的泊松INGARCH模型来拟合,其定义如下:一个整数值过程
,满足
(1)
其中,
是正整数域,
,
,
,
,
,
表示由
生成的
域,
表示均值为
的泊松分布。
为了简单起见,本节主要考虑泊松INGARCH (1, 1)模型的变点探测。
泊松INGARCH (1, 1)模型为
(2)
关于该模型的统计性质有
1) 当
时,该模型是严平稳的。
2) 该过程的期望值为
。
3) 该过程的方差为
。
2.2. 似然比扫描方法
LRSM相较于其它变点探测方法,能够快速有效的探测出时间序列中的变点。本节详细介绍此方法的三个步骤。具体LRSM变点探测步骤如下:
步骤1:扫描观测序列
,获得初始变点估计
;
步骤2:结合最小描述长度准则(MDL),得到一致变点估计
;
步骤3:获得最终的变点估计
。
具体变点探测问题流程图如图1所示。
本节详细介绍分段平稳的泊松INGARCH模型中的变点探测和估计问题。假设观测值
来自于
段平稳的泊松INGARCH过程,则第j段泊松INGARCH的表达式为:
(3)
其中
,
是泊松INGARCH (1, 1)过程的第j个变点,令
,
,
是平稳的泊松INGARCH (1, 1)过程,满足
(4)
其中
,
,
,
。记
为变点集合,定义
,
,
是第j个变点的相对位置,对于
,有
。下面对基于LRSM探测分段平稳的泊松INGARCH过程中变点的三个步骤进行详细介绍。
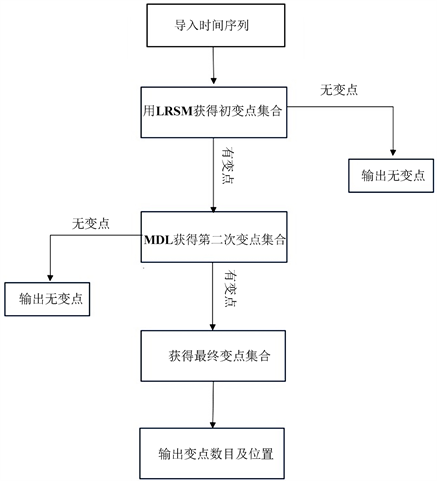
Figure 1. The flowchart depicts the procedure for detecting change points in a piecewise stationary autoregressive process
图1. 分段平稳自回归过程变点探测流程图
第一步:扫描来自于分段平稳泊松INGARCH过程的观测序列
,得到最初估计的变点。
定义t点的扫描窗口为
和相应的观察值为
其中
,h为窗口半径,关于h的选择详细可见第3节。
为了获得扫描窗口中初始估计的变点,可以选择似然比统计量。对于一个来自泊松INGARCH模型的样本
的条件似然函数为
(5)
其中
是先前给定观测值
的条件密度函数,且当
时
。
定义扫描窗口
的似然比扫描统计量为
(6)
其中
,
和
分别是
,
和
的条件似然函数,
,
,
分别是基于序列
,
和
中参数
的估计量。
利用
扫描观测序列,可以得到一系列似然比扫描统计量
。假如变点为t,
一般会较大。若选择的h,满足
,那么每个扫描窗口内最多存在一个变点。因此,通过局部变点位置的估计,可以得到潜在变点集合并定义为
(7)
如果
是以点m为中心的窗口
上的最大值,则m为一个局部变点。则有一系列的初始变点
,其中
。
定理1记录
为实际变点集,假设
且
,则有
,
,满足
定理1表明全部真实变点在初始估计变点集合
的h-邻域内,但此时并不能保证
等于真实变点数量
。也就是说在第一步得到的变点估计往往会有过估计问题,把一些不是变点的值当作了变点,导致
内不但有真实变点集合,还有一些非变点。下一步将利用合适的信息准则来解决以上问题,获得一致的变点估计。定理1的证明过程可参考文献[25]。
第二步:结合MDL,得到一致变点估计。
为了从
中找出准确的变点,可以使用MDL准则进行INGARCH模型的选择过程。定义MDL如下
(8)
其中
是第一步中得到的初始估计变点的集合
,
是各段泊松INGARCH过程的长度,
为第j段的似然函数类似于表达式(5)中的
。给定局部变点估计
,可通过(9)进行变点估计
(9)
其中
,
。
因
里面包括的因素已很大程度上小于样本容量,故
上使用MDL能使计算复杂度大幅度降低,很大程度的提高了计算效率。由于
,因此有
,与
相比其并不理想,而MDL方法保证了
落在区间
的概率接近于1。那么在第三步中本文将利用这个性质定义变点的最终估计。
第三步:获得最终估计
。
定义第j个估计变点
的扫描窗口
和相应的相应观测值
如下
令
(10)
其中
是基于序列
的条件似然函数,同理定义
,
,定义最终变点估计如下
(11)
其中
,
定义类似。LRSM中的每一步都需要求对相应的INGARCH模型参数的估计值。将极大似然估计替换为矩估计,具体原因如下:极大似然估计法需要通过数值优化来求解,故求解过程耗费时间长;矩估计因其有显式表达式,求解过程简单,耗费时间短;虽然极大似然估计值要优于矩估计值,但通过模拟研究发现,矩估计值与极大似然估计值近似,采用矩估计值几乎不影响LRSM的性能。其参数估计详细过程见参考文献 [18] 。
2.3. 对数线性泊松INGARCH模型
尽管泊松INGARCH模型为计数相关数据的建模提供了一个适当的框架,但至少有两个与它应用相关的缺点。第一,当
,其自协方差函数大于0,故不能采用泊松INGARCH模型对负相关进行建模;第二,泊松INGARCH只包括导致正回归项的协变量,否则泊松过程的均值将有可能变为负值。为解决这一问题,Fokianos和Tjøstheim [19] 提出的对数线性泊松INGARCH模型的自相关函数可正可负。在利用LRSM进行变点探测和估计的情况下,对数线性泊松INGARCH模型与泊松INGARCH模型在步骤上相似,但是其中的一些细节需要修正。
对数线性泊松INGARCH (1, 1)模型中的式(4)是
(12)
其中参数
,
,
属于
,
,
表示第j段对数线性泊松INGARCH (1, 1)过程的参数向量。
对数线性泊松INGARCH (1, 1)模型中(5)是
(13)
其中
,而
,故有
(14)
对数线性泊松INGARCH (1, 1)模型中(8)是
(15)
其中
的定义类似于表达式(13)中的
。对数线性泊松INGARCH (1, 1)模型的参数估计类似于泊松INGARCH (1, 1)模型,其详细过程见参考文献 [19] 。
3. 窗口半径的选取
在使用LRSM的初始扫描步骤中,在给定窗口半径大小为h下,那么扫描窗口
的大小为2h,
是每一个时刻t的扫描统计量
的计算复杂度。第二步利用MDL时,
是所需要的
计算复杂度。在第三步中,因在新的扫描窗口进行计算,故此时计算复杂度为
。由以上所述,因此最终计算复杂度的总和为
。h较小的时侯,如
,那么完整的LRSM的计算复杂度为
,显著低于
的数量级。
为了说明窗口半径h的选择,在本节中进行了仿真实验。LRSM中涉及的调优参数包括窗口半径h。为探讨h到底该如何取值,我们使用下面第4节中模型D随机生成的数据进行了重复试验分析,其中d分别取值(1, 2, 2.5, 3, 3.5, 4, 4.5, 5, 6, 7),变点位置取为1250。本章将三步程序应用于长度为n = 2024的模型D重复100次进行分析研究,具有不同的h值,其中
使用不同的d值。结果汇总在表1中。

Table 1. Sensitivity analysis for the choice of h
表1. 窗口半径h的敏感性分析
表示正确估计变点数量的百分比,
表示有效识别变点的百分比。
从表1的结果可以看出:较小的h被选择时虽然会减少第一步的计算成本,即
,然而较小h的会产生非常大的
。也就是说,它生成了一个用于选择变点的候选池,在第二步中增加了
的计算量和计算时间。与之相反,较大的h可能带来计算上的便利但可能违反
。尽管如此,从表1可以看出,对于大多数不同的h值,m的估计值是一致的,表1的结果可以说明的是当
时,得到的估计结果仍很不错。这种结果的产生可能与(Vostrikova, 1981) [26] 的研究有着很大的关联,也就是当序列存在变点时,LRSM可探测出每个变点。故最终估计对h的选择并不敏感,并不会因为h取值的稍微增大或缩小影响结果。因此对于泊松INGARCH模型这里选择d = 3。
4. 模拟研究
本节进行了模拟研究,以评估应用于INGARCH模型的LRSM的性能,用统计软件R语言编程实现了仿真实验。将LRSM应用于泊松分布下的INGARCH模型和对数线性泊松下的INGARCH模型进行了探索研究,并在仿真中设置了三种场景:无变点、一个变点和两个变点。
为了简单度量LRSM的估计精度,作如下定义:一个方法若能正确的探测出变点的数量,当
或
时,以及每对真实变点与估计变点之间的距离在50内,则认为探测出来的变点是有效的。正如文献中Yau和Zhao [25] 提到的,本文也选择50。
4.1. 泊松INGARCH (1, 1)模型
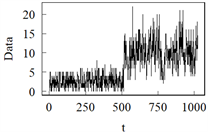
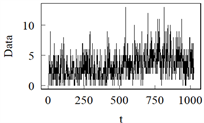
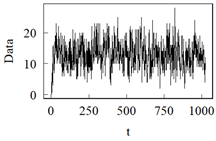
在本节中,将对以下模型进行模拟研究,并对结果进行分析。模型A-F的样本路径图见图2,模拟结果见表2。
Table 2. Simulation results from Model A to Model F
表2. 模型A到模型F的模拟结果
表示正确估计变点数量的百分比,
表示有效识别变点的百分比。
模型A:没有变点的平稳INGARCH (1, 1)模型
模型A场景用来测试在没有变点时的检测性能。采用多种参数组合的INGARCH (1, 1)模型:
生成观测值,参数的选取见表2,取样本量n = 1024。从表2可以看出,LRSM是非常准确和敏感的,无错误识别变点情况。
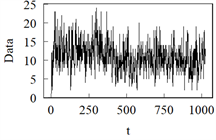
模型B:分段平稳INGARCH (1, 1)模型(1变点)
模型B将变点的位置设在t = 512,取样本量n = 1024,用来测试LRSM在变点靠近序列中端时的性能。从表2可以看出,LRSM正确识别变点数量的频率高达94次,且满足了估计变点与真实变点之间的距离均小于50的次数为92次。LRSM在精确的性质上表现良好。
模型C:分段平稳INGARCH (1, 1)模型(1变点)
模型C将变点依然设在t = 512,且样本量相同,与模型B不同的就是参数选取的不同,用来测试LRSM在变点前后参数变化不明显时的性能。由表2可知,LRSM的性能也很好。
模型A 模型B
 模型C 模型D
模型C 模型D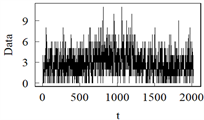
 模型E 模型F注:模型A中参数取1,0.2,0.4进行展示。
模型E 模型F注:模型A中参数取1,0.2,0.4进行展示。
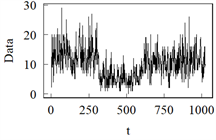
Figure 2. Sample path from Model A to Model F
图2. 模型A到模型F的样本路径图
模型D:分段平稳INGARCH (1, 1)模型(1变点)
模型D变点位置在t = 1250,样本量不同取n = 2024,用来测试随着样本量增加时LRSM的性能。由表2可知,随着样本量的增加,LRSM的性能也很好。
模型E:分段平稳INGARCH (1, 1)模型(2变点)
模型E分别在674和1250处设有两个变点。正确预测变点数量的频率为96,且均满足估计变点与实际变点之间的距离小于50。因此LRSM在精确的性质上表现良好。
模型F:分段平稳INGARCH (1, 1)模型(2变点)
模型F分别在674和1251处设置两个变点,与模型E参数设置不同,表现出来变点前后样本变化较小,其他相同正确预测变点数量的频率为81,满足估计变点与实际变点之间的距离小于50的次数为78,虽然比模型E稍微差点,但也能说明在变点前后变化不大时LRSM的有效性。因此LRSM在精确的性质上表现良好。
4.2. 对数线性泊松INGARCH (1, 1)模型
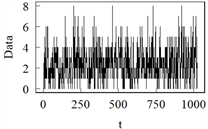
本节将对给出的以下几种对数线性泊松INGARH (1, 1)模型进行模拟研究,并对结果进行分析。模型G-L的样本路径图见图3,模拟结果见表3。
模型G:无变点的平稳对数线性泊松INGARCH (1, 1)模型
研究LRSM在对数线性泊松INGARCH (1, 1)模型的变点识别性能。加入几组不同参数组合来测试无变点时性能,不同参数组合见表3。表3可以看出,LRSM效果还是很不错的。
模型H:分段平稳对数线性泊松INGARCH (1, 1)模型(1变点)
模型H在400处设置一个变点,n = 1024。从表3可以看出,LRSM正确估计了变点的数量多达97次,它们都满足估计的变点与实际变点之间的距离小于50。所以LRSM在这个性质上表现的还是很不错的。
模型I:分段平稳对数线性泊松INGARCH (1, 1)模型(1变点)
模型I和模型H的样本量和变点设置相同,但参数设置不同,模型H设置的参数差距较大,模型I设置的参数差距较小。表3可以看出,当变点前后参数变化不是很明显时,LRSM也能很好地检测到变点。
模型J:分段平稳对数线性泊松INGARCH (1, 1)模型(2变点)
模型J在313和613处设置了两个变点。表3可以看出,LRSM对变点的正确估计次数高达95次,它们都满足估计的变化与实际变点之间的距离小于50。LRSM效果还是很不错的。
模型K:分段平稳对数线性泊松INGARCH (1, 1)模型(2变点)
模型J与模型K在样本量相同时设置了两个相同的变点,但是参数设置不同,模型K在参数上的差距设置很小,用来测试LRSM在变点前后参数变化较小的性能。由表3看出,LRSM效果还是很不错的。
模型L:分段平稳对数线性泊松INGARCH (1, 1)模型(2变点)
模型G 模型H
 模型I 模型J
模型I 模型J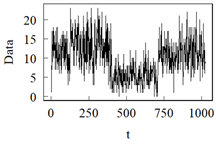
 模型K 模型L注:模型G中参数取1,0.4,0.2进行展示。
模型K 模型L注:模型G中参数取1,0.4,0.2进行展示。
Figure 3. Sample path from Model G to Model L
图3. 模型G到模型L的样本路径图
Table 3. Simulation results from Model G to Model L
表3. 模型G到模型L的模拟结果
表示正确估计变点数量的百分比,
表示有效识别变点的百分比。
模型L与模型J变点位置设置不同,其他均相同,用来测试变点位置设置不同时LRSM的性能。由表3看出,LRSM还是有效的。
5. 实证分析
5.1. 癫痫发作次数数据
癫痫是一种神经疾病,由于脑内的神经细胞异常放电,突然引起脑功能障碍,出现暂时性的异常行为、感觉和意识障碍、肌肉痉挛等症状。癫痫发作次数数据指的是患者在一段时间内,通常指的是每天的发作次数。癫痫发作次数数据的收集和记录对于医生和研究人员来说很重要,因为它可以用来评估患者病情的严重程度、治疗的有效性和疾病的倾向。通过分析癫痫发作次数数据,医生可以制定个性化的治疗方案,预测未来的发作风险,评估药物的有效性和研究癫痫的病理生理。在统计分析中,癫痫发作次数数据通常被视为时间序列数据,时间序列分析方法可以应用于研究发作频率的趋势、季节的变化和预测未来的发作。更为重要的是,变点检测方法也可以用来识别癫痫发作次数的变点,帮助医生调整治疗方案。
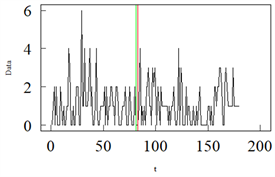
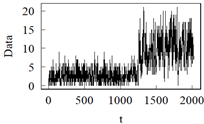
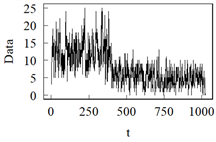
Figure 4. Epileptic seizure counts data
图4. 癫痫发作次数数据
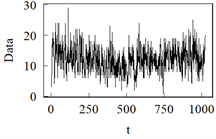
每日癫痫发作次数是评估各种治疗方法有效性的重要信息来源,尤其是评估抗癫痫药物的使用情况。本节基于LRSM利用泊松INGARCH (1, 1)模型对癫痫发作次数数据进行变点探测。该数据来自于Franke和Kirch [27] ,其样本长度为180,样本路径图如图4所示。这些数据是一项大型临床研究的一部分,该研究调查了一种药物对部分癫痫发作的影响。首先癫痫发作次数记录在常规药物下的一段时间,然后从
时患者接受安慰剂。Franke和Kirch [27] 对该数据利用泊松INGARCH (1, 1)模型进行拟合并运用累计和方法探测到变点位置在
。本节运用LRSM探测到变点位置在
。为此,对这两个可能的变点分别进行泊松INGARCH (1, 1)模型拟合,并计算了均方误差。当计算得到变点为第81天时,通过拟合的泊松INGARCH (1, 1)模型得到预测值的均方误差为2.284;变点为第83天时,其
均方误差为2.045,其均方误差的计算公式为
,其中n为样本量,
为实际观测值,
为预测值。这明显地表明,使用变点为第83天时的泊松INGARCH模型更适合该组数据。参数估计如下表4。
Table 4. Parameter estimation of the Poisson INGARCH (1, 1) model
表4. 泊松INGARCH (1, 1)模型参数估计
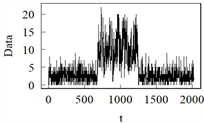
5.2. 弯曲杆菌数据
查阅相关资料得到,弯曲杆菌病是由弯曲杆菌属细菌感染引起的急性细菌感染。主要攻击人体的消化系统,然后引发疾病,是导致胃肠炎最为常见的细菌。其中大多数患者在感染2到5天后就出现症状的现象比较常见,但是也有可能连续1天到1周,更有可能10天。弯曲杆菌感染一般来说是比较轻微的,其中腹泻、腹痛、发烧、恶心或呕吐等现象是最为常见的临床症状,一般持续3到6天。但是,弯曲杆菌可能进入血液循环。因此,对于非常年幼的儿童、老年人、免疫缺陷的人来说是致命的。
Table 5. Parameter estimation of the Log-linear Poisson INGARCH (1, 1) model
表5. 对数线性泊松INGARCH (1, 1)模型参数估计
本节基于LRSM运用对数线性泊松INGARCH模型对弯曲杆菌数据 [19] 进行变点探测。这组数据记录了1990年2月至2000年10月期间加拿大魁北克省北部弯曲杆菌感染患者的数量。该地区每28天记录一次弯曲杆菌感染病例,每年进行13次观察。选取前120个数据,绘制时间序列图,如图5所示。由图5可以看出,在t = 70之前,魁北克省北部弯曲菌病感染人数保持相对稳定的波动,但在t = 70之后,弯曲菌病感染人数“激增”并迅速达到最大值。对数线性泊松INGARCH (1, 1)模型与该数据进行了拟合,并使用LRSM检测变点,在t = 73处检测到变点。这里使用赤池信息准则(AIC)和贝叶斯信息准则(BIC)在无变点模型和有变点模型中选择一个最优模型。当变点为73时的AIC值和BIC值分别为702和717,当无变点时的AIC值和BIC值分别为763和774。最小信息量表明,无论采用AIC准则还是BIC准则,有变点的对数线性泊松INGARCH (1, 1)是相对较优的模型。当变点为73时的均方误差为2.282;无变点时的均方误差为4.664,这也表明了,变点为第73天的对数线性泊松INGARCH (1, 1)模型拟合效果更好。其参数估计如上表5。以上说明了LRSM的有效性。
6. 结论与展望
本文主要研究了分段平稳的INGARCH模型变点探测问题,运用LRSM对变点数目及位置进行探测和估计。最后,将LRSM应用于两个真实的数据集中。通过模拟研究和真实数据分析的结果表明:LRSM能有效的探测出由INGARCH模型生成的分段平稳整数值自回归过程中的变点。
基金项目
辽宁科技大学博士启动基金(601010391)。
NOTES
*通讯作者。