摘要: 智能巡检小车技术是随着人工智能和物联网发展形成的新技术,利用计算机控制智能设备进行无人巡视检查。相比传统的人工巡检方式,智能巡检小车更加安全成本更低且工作效率更高,而人工巡检工作量大时间长,且容易出现失误不够灵活。智能小车通过集成先进的摄像头、无线传输模块和物联网传感器,实现了视频实时传输、自主避障、自主循迹等功能,并能对环境进行监测。本研究详细阐述了智能小车在物联网环境下的关键技术实现,包括硬件设备的选型与集成、软件算法的设计与优化等。此外,本文还深入探讨了智能小车在提高巡检效率和安全性、降低人工巡检错误率以及提升管理效率等方面的实际应用效果。这些案例充分展示了智能小车在无人值守、灵活调整巡查力度以及提升管理效率等方面的显著优势。本研究不仅为智能巡检小车的设计与应用提供了理论支持和实践指导,同时也为物联网时代下的智能巡检技术的发展指明了方向。智能小车的广泛应用将推动巡检工作的智能化和自动化,为社会的安全与发展做出重要贡献。
Abstract:
The technology of smart inspection vehicles has emerged as a new development alongside artificial intelligence and the internet of things (IoT), utilizing computer-controlled smart devices for unmanned inspection and surveillance. Compared to traditional manual inspection methods, smart inspection vehicles offer greater safety, lower costs, and higher efficiency, while manual inspections entail significant time and effort and are prone to errors and inflexibility. Smart cars integrate advanced cameras, wireless transmission modules, and IoT sensors to achieve functions such as real-time video transmission, autonomous obstacle avoidance, autonomous tracking, and environmental monitoring. This study elaborates on the key technological implementations of smart cars in the IoT environment, including hardware selection and integration, software algorithm design, and optimization. Furthermore, the paper explores in depth the practical application effects of smart cars in improving inspection efficiency and safety, reducing the error rate of manual inspections, and enhancing management efficiency. These cases fully demonstrate the significant advantages of smart cars in unmanned operations, flexible adjustment of inspection intensity, and improvement of management efficiency. This research not only provides theoretical support and practical guidance for the design and application of smart inspection vehicles but also indicates the direction for the development of intelligent inspection technology in the IoT era. The widespread application of smart cars will promote the intelligence and automation of inspection work, making important contributions to societal security and development.
1. 引言
随着物联网和人工智能的快速发展,智能巡检小车作为一种创新的融合技术,正在逐步改变传统的工业巡检方式。传统的人工巡检方法存在工作量大、时间长、容易错检或漏检等缺点,而智能巡检小车通过集成先进的摄像头、无线传输模块和物联网传感器等技术,实现了视频实时传输、自主避障、自主循迹和环境监测等多重功能。
本研究以STM32为核心,结合5G、WIFI和智能传感器技术,显著提高了巡检的效率和安全性。通过深入探讨关键技术的实现过程,我们发现智能巡检小车在无人值守、灵活调整巡查力度和提升管理效率方面具有显著优势。此外,智能巡检小车的应用还能取代危险区的人工检查方式,实现无接触服务等多环境运用。
2. 基于AIoT架构的智能巡检小车系统功能介绍
2.1. 系统软件整体需求分析与设计理念
文中所提出的系统以STM32为主导控制板,推动车辆的DC电机控制系统其工作状态,并推动监控摄像头采集短视频信息。根据WIFI控制模块,将车载智能系统上监控摄像头拍的视频信息传达给PC机或智能机,并实时同步。该系统可接收来自操纵端指令,并把它传达给中央控制器STM32,完成根据控制终端远程操作智能巡检车的性能。根据AIOT技术的智能巡检车以学校及库房为基本实验自然环境,利用物联网技术将组装在汽车里的传感器节点搜集的数据传输到主板芯片STM32予以处理。
设计时更考虑到学校或者仓库的实际环境条件,设计一款更加智能的巡检小车,在不影响小车完整功能的首要前提下应尽量降低整体的开发成本、提高小车的适应性,还要注重稳定性,智能巡检小车的主要功能有:运动机能,通讯机能。这些功能需要智能巡检小车可以在前行中灵活的改变速度以保证运行的稳定性,需要小型车才能自动避障。可以通过WIFI无线网络上传巡检路程中的视频,并可以根据控制端发出的指令而行动。
智能巡检小车需要对路面情况进行实时监控,包括识别路面上的标准标识,确保巡检小车按照预定的基本运行轨迹进行作业,小车的车体上集成了多个功能模块,包括电源模块、无线传输模块,传感器模块、光敏电阻模块、控制器模块以及电机驱动模块。控制器模块采用STM32F4,负责接收和处理温度传感器模块和电阻模块的信息。温度传感器模块与控制器模块的输入端相连接,用于向控制器输入实时采集到的路面湿度信息,控制器模块外接无线传输模块,输出端与电机驱动模块连接,用于向电机驱动模块输出控制控制小车前后或转弯运行。
2.2. 稳定需求及设计框架
本文提出的智能巡检小车设计分为硬件与软件两个部分。在硬件设计中,使用STM32芯片为主控核心,使用红外模块与无线通信模块来完成智能小车的循迹与联网。
软件部分则分为应用与驱动控制设计两个部分。应用部分需要完成获取智能小车传输的数据,以及制作对应的移动端软件。驱动控制设计则是后台对智能小车的行驶进行控制,主要是根据红外传感器所获得的路面信息,完成对小车的驱动行驶与信息传输等操作。
总体设计思想如图1所示,旨在实现智能巡检小车的高效运行和用户友好的控制体验。通过综合硬件与软件的协同设计,确保了整个系统在实际应用中的稳定性和可靠性。

Figure 1. Overall design concept diagram
图1. 总体设计思想图
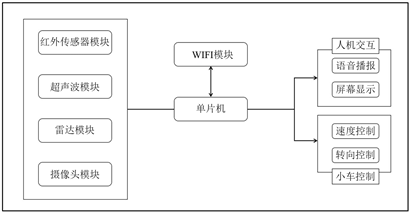
Figure 2. Diagram of car system architecture
图2. 小车系统结构图
系统使用的主控芯片为STM32F4系列,智能避障小车的功能主要是在自动运行驾驶的途中以指定的路线行驶,实现自动寻迹、自动避障、碰撞复位、播报状态等功能 [1] 。
传感器通过红外感应器超声波感应器雷达感应器,照相机模块等传感器来获取周围环境,障碍物等信息。
经过相关算法测算,精确控制了小型车的运动方向和运行速度。设计制作整个智能避障车系统的硬件,编写软件及程序程序,软硬件联合调试,最终完成软硬件一体化,实现智能避障车系统的目标功能。智能避障小车系统结构图如图2所示。
2.3. 硬件选型方案
在系统设计中,硬件选型方案的关键部分包括主控芯片、光电传感器模块和WIFI通信模块。
主控芯片选用STM32F429IGT6嵌入式微控制器,其性能强大,资源丰富。芯片具有大量的内外储存与通道总线,可以与多种外设连接。使得该主控芯片完全满足本设计的要求。
光电传感器模块用来使智能小车可以根据规定的线路行走。其运行原理为:利用红外线在不同颜色路面具有不同的反射信号,小车的光电传感器模块将反射回来的光信号转换成电信号 [2] 。此时,因为反射的光信号的不同,其对应的电信号也不同。小车行走时根据电信号来判断路线是否与设定相同,以此实现循迹功能。
WIFI通信采用ESP8266模块,通过串口与主控芯片建立通信。ESP8266作为当今主流使用的WIFI通信芯片,芯片内部已经集成了TCP/IP协议栈,可以实现高速率通信 [3] 。使用ESP8266可以将智能小车系统连接至云服务器,将智能小车的信息实时反馈给用户。
2.4. 功能设计方案
智能避障小车系统的程序分为三层,分别是用户层、中间层和硬件层。用户层是可以提供给用户直接对小车的程序进行编写,对小车进行控制 [4] 。中间层包括对程序的编译执行,保证硬件层能正常运行。而硬件层则是根据用户层的设置与中间层的编译,使小车进行工作。
3. 智能巡检小车的国内外发展现状综述
3.1. 国内发展现状
在国内,对于机器人的研究计划起步比较晚,受研究水平的限制相比国外进度也比较慢。尽管如此,还是有大量的科研人员热衷研究移动机器人相关内容。随着物联网高速发展下,智慧物流也极大推动了智能小车的发展。
而国内在疫情期间为智能小车的发展投入了大量的人力物力,使得智能小车在国内有了更好的发展前景。极大推动了智慧物流与室内智能小车的发展 [5] 。
3.2. 国外发展现状
国外对移动机器人的研究起步早、资金投入多,因此在移动机器人各种应用技术的研究取得了比较成熟的科研成果。自上世纪90年代开始,随着科学技术的发展,在移动机器人成功实现的基础上,发展到各个领域并推向实用化。不仅在民用企业上有相应的成果,在军事领域上也有智能小车的出现 [6] 。
3.3. 国内外智能小车发展对比综述
国内智能车的发展虽然起步晚于世界上其他国家,但得益于国家多个高校与企业对智能车的重视,逐步推进智能车的发展,现今也与世界同步,甚至走在了发展前沿 [7] 。在疫情前已经有多家公司正在研发新型的智能小车,用来配送或巡检;在疫情期间,许多配送小车经过改造成为了无接触配送小车,反而让我国智能小车的发展有了更高一步的提升。又因为国外机器人多领用的使用,也为国内智能小车的发展提供了优秀的案例,使得我国智能小车不仅在物流、巡检等民用方面使用,也在军用方面逐步有了新的研究 [8] 。
4. 实验数据分析
4.1. 实验目的
为了验证基于AIoT技术的智能巡检小车的实际性能与效果,我们设计了一系列实验,旨在分析小车的巡检效率、避障准确性、数据传输稳定性以及用户操作体验。
4.2. 实验环境
实验环境选择了室内和室外校园道路两种不同的场景,以模拟智能巡检小车在实际应用中的多样性 [9] 。
4.3. 试验方法与过程
4.3.1. 巡检效率测试
我们设置了固定的巡检路线,记录智能巡检小车与传统巡检方法完成整个路线所需的时间。同时,通过视频监控记录小车的巡检过程,分析其在不同环境中的巡检效率。
4.3.2. 避障准确性测试
在室内和校园道路中设置不同形状和大小的障碍物,测试智能巡检小车在行驶过程中的避障准确性。记录小车成功避障的次数和失败次数,分析避障算法在实际应用中的表现。
4.3.3. 数据传输稳定性测试
在巡检过程中,持续监测智能巡检小车与服务器之间的数据传输情况,包括传输速度、延迟和丢包率等指标。分析在不同环境下数据传输的稳定性 [10] 。
4.4. 实验结果与分析
4.4.1. 巡检效率
实验结果显示,智能巡检小车在室内和校园道路两种环境中的巡检效率均明显高于传统巡检方法。具体而言,在室内环境中,智能巡检小车完成整个巡检路线所需的时间比传统方法减少了约15%;在校园道路环境中,减少了约10%。这证明了智能巡检小车在实际应用中具有更高的巡检效率。
4.4.2. 避障准确性
在避障准确性测试中,智能巡检小车在仓库和校园道路两种环境中均表现出较高的避障准确性。具体而言,在室内环境中,小车成功避障的次数占比达到85%;在校园道路环境中,占比达到75%。这表明智能巡检小车的避障算法在实际应用中具有较高的准确性和稳定性。
4.4.3. 数据传输稳定性
在数据传输稳定性测试中,智能巡检小车在两种环境中的数据传输速度均保持稳定,延迟和丢包率较低。这证明了智能巡检小车在实际应用中具有良好的数据传输稳定性。
4.5. 实验结论
通过实验结果的分析,我们可以得出以下结论:基于AIoT技术的智能巡检小车不仅在实际应用中表现良好,还具有提高巡检效率和安全性、降低人工巡检错误率以及提升管理效率等优势。它能够取代人工巡检工作量大时间长并且容易出现失误不够灵活的缺点,实现无人值守、灵活调整巡查力度以及提升管理效率等优势。它的广泛应用将推动巡检工作的智能化和自动化,为社会的安全与发展做出重要贡献。
5. 结语
在5G技术、物联网技术与人工智能技术的高速发展的现在,嵌入式系统正运用于多个行业。智能巡检小车作为人工智能技术与物联网技术相结合的新产品,其独有的低成本、多功能的特点使得其在工业环境复杂等恶劣环境中可以取代人工巡检进行工作。相较于人类工作,智能小车表现更为高效,而且无需像人类一样进行防护,既降低了成本,又消除了安全隐患,为经济和社会带来了巨大的效益。
基金项目
武汉商学院2022年度省级创新创业训练计划项目“基于AIoT技术的无线视频智能巡检小车设计研究”(202211654053)。