1. 前言
农作物种植信息是调整农业结构的重要依据,能够反映农业资源在时序、空间方面的利用情况 [1] 。及时获取作物种植面积和空间分布情况,能够较好地应用于农作物产量、灾害预估和长势监测,并且有利于农业结构调整和国家粮食政策的制定 [2] [3] [4] 。近5年来,随着高分(GF)系列、哨兵(Sentinel)系列卫星的成功发射,遥感数据的空间分辨率、时间分辨率、光谱分辨率均有显著提高,特别是哨兵1号卫星搭载的C波段合成孔径雷达,可以克服天气因素的影响,从而实现对地表的全天候监测。利用上述卫星数据,国内外学者在农作物分类方面展开了系列研究,并得出了一定成果。例如,刘跃辰等 [5] 以河北省冀州市为例,利用国产高分一号卫星2 m全色、8 m和16 m多光谱卫星数据,对冀州市冬小麦种植面积及种植结构变化情况进行了监测;郑利娟 [6] 基于高分一号和六号卫星的影像特征,通过挖掘适用于农作物分类的相关特征,研究其对农作物分类精度的影响;贾玉秋等 [7] 针对GF-1数据与Landsat 8数据在玉米叶面积指数反演精度方面进行了对比研究,认为GF-1卫星的高时间分辨率以及高空间分辨率特征能够代替传统中分辨率数据成为农业遥感长势监测中的重要数据源;Csillik等 [8] 以Sentinel-2影像为数据源,在加利福尼亚州和德克萨斯州两个复杂和集中管理农业区中,测试了多种基于对象的时间约束DTW (Dynamic Time Warping)算法农作物分类的表现;甄晓菊等 [9] 通过Sentinel-2A NDVI时序数据和多种分类方法提取河北省辛集市冬小麦种植信息,结果表明,Sentinel-2A卫星构建的10 m分辨率NDVI植被指数时间序列数据在农作物识别中有巨大潜力;杜保佳等 [10] 基于Sentinel-2A影像数据提取NDVI时间序列,并用面向对象决策树分类算法进行黑龙江省北安市农作物类型识别研究;吴静等 [11] 利用Sentinel-2A NDVI、RENDVI (Red Edge Normalized Vegetation Index)时序数据,构建多种方案并通过RF (Random Forests)分类器识别景泰县作物类型。
2016年6月,农业部、中央农办等10部委联合印发了《探索实行耕地轮作休耕制度试点方案》,将河北省黑龙港流域深层地下水漏斗区列为季节性休耕试点区 [12] 。方案明确提出应利用遥感技术对休耕情况进行监测,以便精准评价休耕政策的实施效果。然而,黑龙港流域地处中国北方,属于典型的温带大陆性季风气候,雨热同期,该区域自11月入冬至第二年3月中旬为采暖季,该期间由于气象等自然因素以及燃煤取暖等人文因素的综合影响,大气污染现象严重,传统光学传感器成像过程容易受到云、雾霾等因素影响,成像数据质量较差。7~8月份是该区域秋收作物的生长旺季,然而该时间段同时也为该区域雨季,受云、雨等天气影响,光学遥感数据较易受到污染,缺值现象较为严重。因此,单纯依靠光学传感器难以获取区域农作物完整生长过程遥感数据,无法保障其特定生长物候节点数据的及时获取。相对于光学传感器,微波遥感具有全天候、全天时、不受天气等因素影响的优点,特别是随着哨兵1号及我国高分3号等一系列合成孔径雷达传感器的成功发射,SAR数据已成为当前遥感科学领域的研究重点。因此,如何充分利用SAR数据在时间序列上的优势进行特定区域农作物类别精细划分是当前研究的热点问题。
2. 研究区概况及数据预处理
2.1. 研究区概况
永年区位于邯郸市北部、黑龙港流域南部,地处北纬36˚35'~36˚56',东经114˚20'~114˚52'之间,全区地势西高东低,农作物以冬小麦–夏玉米为主,具备黑龙港流域典型的气候、地貌及农作物种植特征,因此本文选择该区域作为实验区域,探索基于哨兵1号雷达数据进行黑龙港流域农作物分类的最优技术方案。黑龙港流域及永年区地理位置如图1所示。
2.2. 数据预处理
2.2.1. 野外样本预处理
地面调查采样数据在提取农作物种植结构信息时,一方面用于建立地物类型的分类规则和解译标志,另一方面用于实验结果的精度验证。项目组成员于2022年6~11月到实验区通过无人机航拍及地面GPS测量进行地面样本数据采集工作,共进行6次野外调查取样。根据实验区内农作物分布情况及实地调查结果,最终将实验区内的地物类型分为10类:冬小麦–夏玉米、大蒜–夏玉米、蔬菜、棉花、谷子、建设用地、林地、裸荒地、果园、水体。
基于无人机航拍影像,实验区野外调查共采集到3169个地物样本数据,其中,冬小麦–夏玉米682个,水体172个,建设用地767个,裸荒地179个,林地152个,谷子209个,蔬菜330个,大蒜–夏玉米210个,棉花130个,果园338个。将采集的地物类型样本点按7:3的比例分为训练样本和验证样本,各地物类型样本数量情况见表1所示。
Table1. Field survey sample point data in the test area
表1. 实验区野外调查样本点数据
2.2.2. 哨兵1号雷达数据预处理
哨兵1号(Sentinel-1)卫星是欧洲航天局(European Space Agency, ESA)和欧洲委员会(Council of Europe, EC)针对“哥白尼计划”研发的对地观测卫星,于2014年4月发射升空。
本文选择的Sentinel-1遥感影像数据为IW GRD等级,并采用多时相VV、VH极化数据进行农作物分类,共选取了2018年10月~2019年10月期间32景影像数据,其具体获取时间如表2所示。

Table 2. Radar image data set of Sentinel-1
表2. Sentinel-1雷达影像数据集
本文使用SNAP (Sentinels Application Platform)软件对雷达影像进行精轨校正、辐射定标、滤波、地形校正、图像配准等预处理,以获取精准的地理位置信息,实现DN值向后向散射系数的转换,消除噪点的影响。
3. 雷达数据农作物分类方案
3.1. 分类方法
随机森林(Random Forests, RF)分类算法是2001年由Breiman等提出的一种有效的基于CART决策树(Classification and Regression Tree, CART)机器学习方法,是一种集成分类器 [13] ,利用集成学习的思想将多棵决策树进行综合,本质是决策树分类算法的改进。该算法特性良好,相对于单棵决策树而言,泛化能力更强、稳定性更高、运算速度较快且鲁棒性较好,能够避免因单棵决策树引起的过拟合现象,小样本容量情况下依旧能够保持较好的稳定性,具备良好的抗噪能力,容易实现,分类效果较好,在农作物种植信息提取应用中优势明显。基于已有研究基础,本文选择随机森林作为分类方法,在随机森林分类算法模型构建过程中,特征变量的数量m和决策树的数量n为需要设置的参数,根据应用不同其取值不同,根据多次实验对比,本文将n的值设置为1000,m的值设置为分类特征总数M的均方根。
3.2. 分类特征选择
雷达数据的影像特征因极化方式、成像时间不同而产生差异,为探究不同时相、不同极化方式的Sentinel-1雷达影像数据对农作物种植信息提取的影响,构建不同分类方案,基于随机森林分类算法(SF)分别对多时相单极化、多时相双极化、纹理特征、多时相双极化与纹理特征组合四方面进行农作物制图研究,具体方案及介绍如表3所示。
Table 3. Classification scheme table of Sentinel-1 data
表3. Sentinel-1数据分类方案表
4. 结果分析
4.1. 农作物后向散射系数变化趋势分析
利用实验区内训练样本提取多时相Sentinel-1数据中农作物后向散射系数值,并构建时间序列曲线,所得结果如图2所示。从图2中可以看到,在2021年10月~2022年10月期间,不同农作物的后向散射系数在VH和VV极化下区别显著。从总体上看,所有农作物的时序后向散射系数值在VH极化下均低于VV极化。其中,冬小麦–夏玉米的时序后向散射系数值在VH、VV极化下波动范围分别在−23.24~−15.67、−15.27~−8.45之间,两种极化方式下时序后向散射系数变化趋势基本相同;大蒜–夏玉米的时序后向散射系数值在VH、VV极化下波动范围分别在−21.03~−14.19、−12.55~−9.02之间,两种极化方式下时序后向散射系数变化趋势基本相同,并且VH极化下的时序后向散射系数较VV极化波动幅度更大;谷子的时序后向散射系数值在VH、VV极化下波动范围分别在−23.72~−15.63、−15.17~−8.74之间,两种极化方式下时序后向散射系数变化趋势基本相同;蔬菜的时序后向散射系数值在VH、VV极化下波动范围分别在−18.82~−14.46、−11.37~−7.31之间,两种极化方式下时序后向散射系数变化趋势基本相同;棉花的时序后向散射系数值在VH、VV极化下波动范围分别在−21.32~ −14.04、−14.35~−7.89之间,两种极化方式下时序后向散射系数变化趋势基本相同。
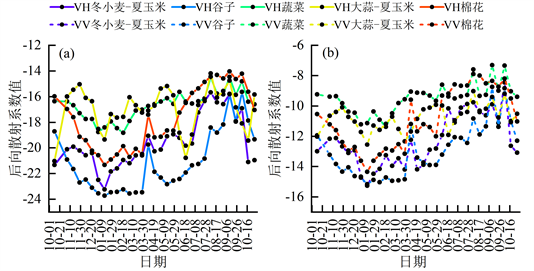
Figure 2. Backscattering coefficient characteristic curves of different crops after time series
图2. 不同农作物时序后向散射系数特征曲线图
4.2. 农作物分类结果分析

Figure 3. RF classifier crop classification results based on Sentinel-1 data
图3. Sentinel-1数据RF分类器农作物分类结果
使用多时相Sentinel-1 VH单极化数据作为分类特征,引入RF分类器中所得农作物分类结果如图3(a)所示。使用多时相Sentinel-1 VV单极化数据作为分类特征,引入RF分类器中所得农作物分类结果如图3(b)所示。使用多时相Sentinel-1 VH、VV双极化数据作为分类特征,引入RF分类器中所得农作物分类结果如图3(c)所示。单独使用纹理特征,引入RF分类器中所得农作物分类结果如图3(d)所示。联合使用多时相Sentinel-1 VH、VV双极化数据及纹理特征作为分类特征,引入RF分类器中所得农作物分类结果如图3(e)所示。
使用验证样本对上述分类结果进行精度验证,各分类方案在RF类器下所得混淆矩阵结果如表4所示。
从表4中可以看出,在RF分类器下,所有分类方案所得总体精度均在74%以上,Kappa系数均在0.70以上。分类方案A利用多时相VH单极化数据进行分类,总体精度为77.18%,Kappa系数为0.73。分类方案B利用多时相VV单极化数据进行分类,总体精度为74.34,Kappa系数为0.70,与分类方案A相比,总体精度降低2.84%,Kappa系数降低0.03。分类方案C利用多时相VH、VV双极化数据进行分类,总体精度和Kappa系数分别为80.86%和0.77,相较于分类方案A和B,总体精度分别提高3.68%和6.52%,取得所有分类方案中最优分类精度。分类方案D基于纹理特征进行分类,总体精度较分类方案A和B分别提高0.53%和3.37%。分类方案E联合使用多时相VH、VV双极化数据和纹理特征进行分类,与分类方案C相比,总体精度降低1.36%,Kappa系数降低0.01,表明纹理特征的加入未能有效提高多时相VH、VV多时相数据分类精度。各方案对冬小麦–夏玉米识别精度均高于86%,对谷子识别精度均高于74%,对蔬菜识别精度均高于72%,对大蒜–夏玉米识别精度均高于75%,对棉花识别精度均高于78%。
Table 4. Comparison table of RF crop classification accuracy of Sentinel-1 data schemes
表4. Sentinel-1数据各方案RF农作物分类精度对比表
5. 结论
1) Sentinel-1雷达数据受云、雨等天气状况影响较小,因此能够构建更加完整的特征曲线以反映农作物生长信息,在实验区内农作物种植结构提取中有较大的应用价值。
2) 使用Sentinel-1影像数据提取特征进行农作物分类的不同方案中,使用多时相VH、VV双极化数据取得最高分类精度,纹理特征的加入均未能够有效提升其农作物分类精度。
基金项目
河北省地质矿产勘查开发局资源环境监测仿真技术与应用创新团队,河北省自然科学基金(D2019402067)。
NOTES
*通讯作者。