1. 引言
电动汽车具有低能耗、低污染等优点 [1] ,作为燃油车的理想替代品 [2] ,它在减少交通部门的温室气体排放方面正发挥巨大作用 [3] 。未来,电动汽车将会替代传统燃油汽车成为主要的交通出行工具。2021~2023年中国纯电动汽车保有量逐年增加。据预测,2023年底纯电动汽车保有量将突破1000万辆 [4] 。2022年第一季度美国市场累计注册158,689辆电动汽车,电动汽车目前占轻型汽车市场的4.6% [5] 。然而电动汽车的普及还面临着许多技术问题,首先受制于车载电池的容量限制,电动汽车的续航里程普遍低于传统的燃油汽车;其次受限于电池技术,电动汽车电池充电速度远低于燃油车加油速度;最后电动汽车基础配套设施建设缓慢,目前城市和城际交通网络中,电动汽车充电站的数量普遍低于燃油汽车加油站的数量。以上因素使得电动汽车驾驶员经常受到里程焦虑问题的困扰。“里程焦虑”,其定义是电动汽车驾驶员在电动汽车在到达目的地之前对电池电量耗尽的担忧 [6] 。电动汽车驾驶员的出行行为往往会受到里程焦虑的负面影响。如何科学合理地引导电动汽车出行,完善电动汽车交通网络布局,缓解出行者的里程焦虑,促进电动汽车的有序发展成为政府关注的问题。本文通过建立网络设计模型和设计匹配算法,以便政府能够合理地完成车道扩展和充电站选址,以减少系统总出行成本。
2. 文献综述
2.1. 网络设计问题
Beckmann [7] 首先提出了网络设计问题(NDP)的理论。网络设计问题一直被认为是富有挑战性的。许多后续研究将NDP表述为混合整数线性规划问MILP [8] 。到目前为止,网络设计问题有许多研究方向。Bell等 [9] 将NDP问题应用到解决轮渡网络设计问题(FNDP)。Scherr等 [10] 考虑了城市物流环境中包裹递送战术规划的服务网络设计问题。Meng等 [11] 研究了货运网络设计问题。由于电动汽车兴起的较晚,电动汽车网络设计问题还在逐步完善。在近年来的网络设计研究问题中,我们只回顾了与电动汽车有关的网络设计问题。与研究NDP的大量文献相比,Lee等 [12] 在网络设计模型中考虑了用户的充电行为和出行偏好,结合用户均衡模型进行流量分配,建立了城市快速充电站的选址模型。由于出行者的选择偏好存在显著的异质性 [13] 、对事物的心理认知不同等主观因素,出行者的时间价值会直接影响出行选择行为 [14] 。Chen等 [15] 考虑了时间价值系数不同的出行者的选择行为,研究了充电道和充电站两种类型的充电设施沿着交通走廊的部署,分析了电动汽车网络的充电设施选择均衡。在考虑用户出行选择行为的网络设计问题中,大多数都采取了双层模型去求解。He等 [16] 考虑了用户选择行为和充电计划,充电站选址问题被表述为一个双层数学模型,并通过遗传算法来求解。Wang等 [17] 提出了一种基于用户均衡的全局优化方法,解决了具有多个容量级别的离散网络设计问题(DNDP),并建立一个双层规划模型,上层模型旨在通过向候选路段添加新车道来最小化系统总出行时间,而下层模型则是传统的用户均衡(UE)问题。很少有研究考虑在BEV网络领域涉及充电时间和里程焦虑因素的网络设计问题,He等 [18] 对BEV用户的行为进行了建模。Chen等 [19] 考虑了无线充电通道的NDP。这些研究可以为我们的论文提供理论基础。
2.2. 电动车路径问题
车辆路径规划问题(VRP)广泛存在于车辆调度问题中,许多学者对其展开了研究,并产生了诸多变种。节能减排和时间窗是车辆路径问题中的两个重要考虑因素。Schneider等 [20] 首次提出了带有时间窗的EVRP (EVROTW),在有时间窗约束的车辆路径问题(VRP)中,是以最小化车辆数量为主要目标,以最小化行驶距离为次要目标,同时不违反时间窗、路径持续时间或通行能力约束。Goeke等 [21] 应用领域搜索算法,解决含有时间窗问题的车辆路径规划问题。对于传统的VRP,许多专家已经进行了大量探索与研究,逐渐趋于成熟。电动汽车路径问题(EVRP)在经典路径问题上考虑了电动车的特性。Wang等 [22] 提出了一个多目标模型来优化出行成本的三个组成部分(即行驶成本,能耗和充电成本)。电动汽车特性的其他典型研究考虑了不确定的能耗特性 [23] 、非线性充电函数特性 [24] 。总体而言,解决电动汽车路由问题可以对电动汽车的微观特征进行深入分析。学者们主要关注如何合理地建立电动汽车车队的调度方案以及如何调度电动汽车以适应运输网络,而很少关注运输网络的扩展或调整。
大多数宏观研究都致力于讨论交通网络平衡或充电设施的建设。微观层面的研究主要涉及电动汽车的调度、运营管理以及电动汽车驾驶员的心理特征。总体而言,对于BEV的系统设计层面(即交通网络设计层面)的理论研究还比较缺乏。同时,针对NDP开发的大多数算法都是基于进化算法(例如遗传算法,模拟退火)的框架。当网络规模变大时,求解NDP所需的时间和计算复杂度将显著增加。本文通过建立考虑异质BEV驾驶员特性(即充电时间和里程焦虑)的BEV交通网络设计模型和匹配算法,填补了上述研究空白。
3. 问题描述和模型建立
3.1. 基本假设和符号
由于本文的目标是考虑异质BEV驾驶员行为特征来确定最佳车道扩展方案和充电站建设方案,因此基于UE理论建立了BEV网络设计模型。为了简化问题并便于建模,下面列出了模型的基本假设。
1) 本文考虑的电动汽车为纯电动汽车,不考虑混合动力汽车等其他类型的新能源汽车。
2) 本文不考虑道路的交通拥堵条件。
3) 我们假设BEV驾驶员在所有可用路径中选择旅行时间最短的路径,对于每个O-D对,至少存在一条可用路径。
4) BEV的能量消耗与交通拥堵无关。
5) 用户可以在充电站为电动车充电。电池电量与充电时间是线性关系,并且随着时间的增加而增加。BEV的充电量应允许用户完成行程。由于里程焦虑,假定用户将保证BEV的电池容量在任何时候都不小于一个常数(与旅行的起点和目的地有关)。
6) 本文所假设的充电站都是同一种类型的快速充电站,并且充电站处的充电器的数量是足够的。
7) 本文所考虑的电动汽车具有相同电池尺寸和初始充电状态,电池的能量消耗仅与行进的距离有关。
8) 城市交通网络中的行驶时间是基于路段函数(BPR)设定的,并且满足可加性定律。
9) 对于每条路段,假设政府最多只能加三条车道。图1显示了政府在原路段上增加两条车道的过程。

Figure 1. The process of the government adding 1 lane to a link
图1. 政府在一个路段上增加1条车道的过程图

Table 1. Definition of the parameters and variables
表1. 决策变量和参数的定义
3.2. BEV交通网络描述
将BEV交通网络表示为
,A是路段集。N是顶点集合。
代表有充电站的节点集合,
代表没有充电站的节点集合。
车辆在路段a上的行驶时间是路段a上的交通流量与通行能力比值的非线性函数,当路段a上的交通量
增加时,车辆在该路段上的行驶时间也会逐渐增加(称为拥堵效应)。因此,路段a上的性能函数被设置为严格单调递增函数。在本研究中,我们采用BPR函数,该函数的数学表达式如式(1)所示,式中
是自由通行时间,
和
是两个正参数,取决于交通网络实际情况。
表示路段a上的交通流量;
表示路段a上的初始通行能力;
表示在路段a上扩展一条车道可以增加的容量;
和
是两个0-1变量,表示了政府可以扩展路段a的程度。当
的时候,表示在原有的路段a上增加k条车道,其中k = 1,2。
(1)
3.3. 网络均衡的定义
本文进一步假设有限数量的充电站位于网络的某些节点处,因此沿路径行驶的车辆可能会经过充电站。因此,我们有以下定义:
定义1:如果BEV能够在不充电或充电的情况下到达目的地,且可以为BEV保留足够的电池能量以应对行驶时的里程焦虑,则该路径是可用的。
如果汽车在行驶途中没有充电站的话,那么可用路径的距离必须在电动汽车的行驶范围内。否则,只要电动车可以在沿途的充电站充电,以避免在到达目的地之前耗尽电量,路径就是可用的。
图2是进一步说明定义1的简单示例。在这个小型交通网络中,节点1~2之间由三个路径连接,即1-2、1-3-2和1-4-2。充电站位于节点3和4上,电动汽车可以在此充电。假设BEV的满载电量为20 kWh;其初始充电状态为5 kWh,能量消耗率为0.4 kWh/mi。可以通过简单计算看出来路径1~2不是可用路径。沿着另外两条路径BEV可以到达节点3或4。因为车辆可以在节点3或节点4充电,如果充满电,可以达到50公里的续航里程,因此可以成功到达目的地。因此,路径1-3-2和路径1-4-2均为可用路径。
定义2:在网络均衡状态下,所有已用的路径都是可用的。并且一个O-D对的所有已用路径的行驶时间相同,小于或等于同一O-D对的任何未被使用的可用路径的行驶时间 [18] 。
根据上述定义我们建立多类用户的交通网络均衡模型。在[UE]模型中,
表示在O-D对
之间允许第
类用户沿着可用路径行进的最少的出行成本,同时考虑了能量消耗和里程焦虑;
表示在O-D对
之间第
类用户的所有可出行路径构成的集合;
是路径–路段的关联变量,若路段a在路径p上,
,反之
。
表示在O-D对
之间,通过路径
的第
类用户的流量。
表示在O-D对
之间的总旅行需求。
表示在O-D对
之间,第
类用户的旅行需求。[UE]模型如下所示:
(2)
(3)
(4)
(5)
(6)
在[UE]模型中,式(2)为目标函数,约束(3)~(6)为网络流守恒约束。本文假设BEV驾驶员的里程焦虑是与O-D对w有关的常数。因此,对于在O-D对
之间的特定路径,可以确定最小出行成本
。
本文首先证明BEV交通网络存在网络均衡,且路段流量是唯一的。
证明:给定交通网络扩展计划
,[UE]模型的拉格朗日函数如下所示:
(7)
其一阶条件如下:
(8)
(9)
那么,可以得到[UE]模型的KKT条件:
(10)
(11)
其中
是与约束(4)相关的乘子。
显然,式(3)~(6)、(10)~(11)等价于定义2中给出的关系,这表明网络均衡的存在。由于假定路段性能函数是严格单调增加的。因此,路段性能函数的Hessian是正定的。因此,路段流量是唯一的。
其次,定义集合:
(12)
以及一个车道扩展方案
。证明均衡条件(3)~(6)、(10)~(11)等价于找到满足以下变分不等式的集合
,变分不等式[UE-VI]如下所示:
(13)
证明:
令
,
,可以得到如下的不等式:
(14)
接着令
,
,可以得到如下的不等式:
(15)
因此,结合约束(14)~(15)得到如下的等式:
(16)
将约束(3)代入到约束(16)中,得到如下的等式:
(17)
令
,
,其中
表示在n维向量中第i个位置等于1,或者等于0;因此,最后得到如下的不等式:
(18)
综上均衡条件(3)~(6)、(10)~(11)等价于变分不等式[UE-VI]。
3.4. 模型建立
建立交通网络设计模型,我们将[UE]模型的KKT条件引入[ND]模型。在[ND]模型中,
代表在路段a上增加一条车道的成本,
表示建设一个充电站的成本,B代表政府投资上限。最后,考虑出行者异质和里程焦虑的BEV网络设计模型可以表示为[NE-UD]模型。该模型如下所示,该模型除了以下的约束,还包含约束(1),(3)~(6),(10)~(11)。
(19)
(20)
(21)
(22)
(23)
(24)
在该模型中,式(19)表示目标函数,表示BEV网络的总出行成本最小化,第一项表示行驶时间成本,第二项表示充电延误时间成本。约束(20)表示政府投资扩建车道和建设充电站的成本不能超过相应的投资上限。式(21)和(22)是变量
的0-1约束。式(23)和(24)是变量
的0-1约束。
4. 算法设计
4.1. 网络均衡的求解方法
[UE]模型是具有线性约束的经典凸数学问题,为了便于模型求解,我们通过间隙函数方法 [25] 进一步将[UE-VI]模型(等同于[UE]模型)转换为以下非线性规划问题(简称[UE-NLP])。该方法描述为:如果[UE-NLP]模型的目标值等于0,则计算出的流量
将满足定义1和2定义的UE条件。
(25)
(26)
(27)
(28)
(29)
(30)
(31)
其中
、
是与约束条件(26)和(27)有关的乘子,
是路径与路径之间的关联变量,当
,
。由于[UE-NLP]模型是基于路径流量构建的,因此在求解该模型时需要事先进行路径枚举。本文采用有效的最短路模型来避免路径枚举 [19] ,该模型简称为[CGA]模型。
由于本文考虑了异质用户,因此构建了每类用户对于每个O-D对w的[CGA]模型:
(32)
(33)
(34)
(35)
(36)
(37)
(38)
(39)
(40)
(41)
(42)
(43)
(44)
(45)
式(32)是目标函数,并得出了对于与O-D对w相关联的可用路径p的最短行驶时间。其中,
是一个0-1变量,当O-D对w包含路段a时
,否则为0,
和
分别表示在充电站i处的操作时间和每单位电量的充电时间,
是一个0-1变量,表示驾驶员是否在节点i充电,
表示电动汽车在节点i的充电量。约束(33)表示了决策变量
与节点–路段关联矩阵Δ之间的关系,使得新生成路径的原点为o(w),目的地为d(w),其中,
是长度为
的向量,向量由两个非零分量组成,一个值为1,与w的原点相关联(表示为o(w)),另一个值为−1,与w的目的地相关联(表示为d(w))。约束(34)要求BEV电池电量水平变化的连续性,电动汽车到达目的地的电量等于在路段a原点的电量减去在路段a上的电量消耗,其中,
表示电动汽车在节点i充电后的电池电量状态,
表示每千米电池的功耗,
表示路段a的长度。约束(35)要求电动汽车在节点i处充电后的电量可以满足电动汽车下一次旅程的需要,在路段a上行驶时电动汽车的电量在任何时候都不会低于
,其中,
是由于里程焦虑引起的BEV电池电量的下限。约束(36)表示当
等于1时,
等于0,否则等于1。约束(37)要求在节点i处的充电量不能超过
,其中,
表示节点i可以提供的电量上限,且如果节点i处没有充电站,
等于0,否则,
是一个足够大的常数。约束(38)表示BEV的电池电量不能超过其上限
。约束(39)表示了BEV的初始电量状态
,以满足第3.1节中的假设(6)。约束(42)表示了
和
之间的关系,如果运输网络中没有充电站,则此约束条件要求BEV无法充电。约束(43)表示
等于
的最大值。此外,模型中的M和K是两个足够大的常数。
为了求解[CGA]模型,采用列生成算法,该算法是求解大规模线性规划问题的最有效的算法之一。列生成算法的思路是更新最短路径时,将新的路径加入到最短路径集合,并将某条路径为零的最短路径去除。由于网络中可用路径的数量是有限的,该算法能在有限迭代次数下终止 [26] 。针对BEV运输网络的UE模型进行求解所涉及的具体步骤如下:
Step 1:初始化,对每类驾驶员的每一个O-D对
,用
,构造一个与
有关的集合
,计算与
相关的
。
Step 2:求解基于
的[UE-NLP]模型,并将该模型的最优解集表示为
,其中
是和约束条件(27)有关的乘子。
Step 3:为每一个O-D对
求解[CGA]模型,得到新的可用路径
,如果所有O-D对的CGA模型的目标函数
,则停止,这种情况下
就是满足定义1和定义2的BEV网络均衡状态,否则转到Step 1。
4.2. 网络设计模型的求解方法
为了求解网络模型,本文采用活动集算法(ASA)来求解该模型 [27] 。该算法的基本思想是首先求解[NE-UD]模型的松弛版本(简称[NE-R]),并获得与活动集相关的约束的乘子。然后,建立背包问题模型(简称[KP]),以验证[NE-R]模型是否达到局部最优。此外,通过[KP]模型得到的解,更新[NE-R]模型中的活动集。该模型除了以下的约束,还包含约束(20)~(27)。
(46)
(47)
(48)
(49)
(50)
为了实现ASA算法,我们首先定义关于车道扩建和充电站建设相关的四个集合,
,
,
,
。
和
;
和
加起来是一个全集。即
,
;
,
。对于BEV网络模型中,[NE-R]模型如下所示,网络中所有的车道根据集合
和
进行了不同程度的扩展,网络中的充电站也根据集合
和
进行建设。ASA算法步骤如下:
Step 1:令
,
,
。
,
。基于
,
求解每类驾驶员的CGA模型,根据得到的结果求解[UE-NLP]模型。
Step 2:构建一个集合
来求解[NE-R]模型。再次求解[NE-R]模型,得到约束
和
相关的乘子
和
,以及约束
和
相关的乘子
和
。令BEV交通网络出行总时间为
:
Step 3:令
,通过
来求解下列[KP]模型。
该模型中
和
,
和
是都是0-1变量,
和
,
和
。如果
,那么
就会从集合
转移到集合
中;
则代表了相反的过程。如果
,那么i就会从集合
到集合
中,
则代表了相反的过程。如果该模型的目标函数等于0,则停止循环,
是局部最优解,否则,进入Step 4。
Step 4:计算
,
,
,
,
,并转到Step 5。
,
Step 5:根据新的车道扩展方案
以及新的充电站建设方案
来求解BEV运输网络[UE-NLP]模型。如果
,转到Step 6,因为集合
,
导致BEV运输网络中的总出行成本减少,否则,令
,其中
是一个足够大的数,转到Step 3。
Step 6:令
,
,
,
,
,转入Step 2。
5. 数值算例
在本章节中,将采用Nguyen-Dupuis网络来验证所提出的算法的有效性和合理性,并对不同投资预算进行了敏感性分析。本文所有算例都在一台配置MacBook Air-Apple M2处理器和8GB内存的计算机上运行。所涉及的混合整数线性规划问题借助了数学规划求解软件GAMS 40.0。
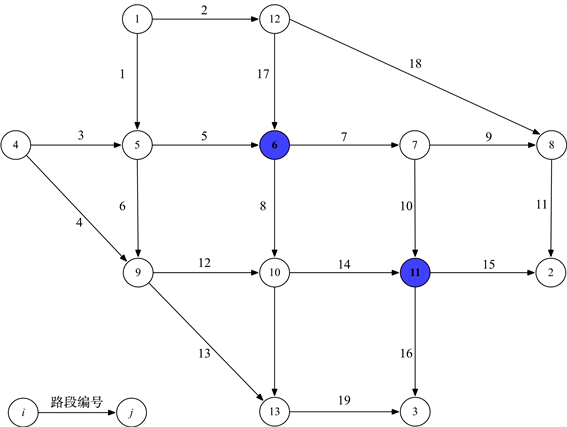
Figure 3. Nguyen-Dupuis network
图3. Nguyen-Dupuis网络
5.1. Nguyen-Dupuis网络
本章节所采用的Nguyen-Dupuis网络由13个节点,19个路段和4个O-D对组成,如图3所示。相关的参数设置如表2所示,OD需求如表3所示。本文假设路段距离(即
)是路段自由流行进时间的1.5倍 [26] 。最大电池容量
,设置为24 kwh,初始电池容量为最大电池容量的0.2倍,
,能耗率为0.29 kwh/mi。
,
。
。Nguyen-Dupuis网络中存在两个充电站,均为快速充电站,分布在节点6、11。假设充电站建设成本都相等,均为0.085亿美元。充电站充电功率为90 kwh。在路段a上扩展一条车道的成本
被假定为路段通行能力的千分之一 [19] 。
Table 2. Nguyen-Dupuis network related parameters
表2. Nguyen-Dupuis网络相关参数
Table 3. Nguyen-Dupuis network OD demand
表3. Nguyen-Dupuis OD需求
本文算例中设置三类用户,时间价值系数分别为0.25,0.5,1.3。其里程焦焦虑分别为2,1和0 kWh。对于每个O-D对,三类用户的行驶需求分别为1:2:1。每个路段上的平衡流量如表4所示。最佳车道扩展计划为路段4扩展3条车道,路段6和10分别扩展一条车道,节点9处建设一个充电站。
如表4所示,某些路段上的平衡流量等于0。造成上述现象的原因是复杂的。一些路段可能有很长的距离,这可能导致BEV电量耗尽,而其他路段可能导致BEV驾驶员里程焦虑。因此,在BEV交通网络中,一些路段的存在是毫无价值的。在规划建设BEV交通网络基础设施时,政府应考虑在此类路段附近建设更多充电站。
5.2. 不同投资规模的敏感性分析
本文以Nguyen-Dupuis网络为测试网络,探讨不同政府投资规模下的车道扩展和充电站建设问题。本文将政府投资规模设为0~3.5一定区间的8个值。随着政府投资规模的增加,扩展车道的数量逐渐增加。不同投资规模下的最优方案和系统总出行成本如表5所示。随着投资规模的增加,系统总出行成本从56,089下降到28,619 min,下降了29.27%。在不同的场景下,最多扩展7条车道。在不同的投资规模下,路段4和10反复出现,该结果表明,基于当前的运输需求情况,BEV网络中的关键路段是4和10两个路段。系统总出行成本在投资规模1.5和2之间出现了显著下降。因此,政府最好将目前的BEV交通网络投资规模设定为2。当政府制定计划时,投资预算也应被视为一个重要因素。
Table 5. Optimal solutions under different investment scales
表5. 不同投资规模下的最优方案
6. 结论
随着电动汽车数量的显著增加,政府迫切需要交通网络建设指南来缓解拥堵。然而,现有的针对BEV运输网络的NDP研究通常集中在网络平衡和设施建设上,缺乏系统的网络优化理论。针对上述缺点,我们为BEV运输网络设计了一个新颖的最佳车道扩展和充电站建设问题。具体来说,我们首先考虑异质BEV驾驶员的充电行为和里程焦虑建立网络平衡条件。然后,将这些条件进一步引入到网络设计模型中。为了避免路径枚举,设计了一种嵌入列生成算法的活动集算法对模型进行求解。从计算时间的角度来看,我们提出的算法比进化算法(例如遗传算法)更有效。这使我们的方法适用于大中型BEV运输网络中的案例分析。通过对不同程度的投资规模的敏感性分析,我们可以得出以下结论:
1) 对Nguyen-Dupuis网络进行优化的结果表明,优化方案可以帮助减少29.27%的总旅行成本。从计算结果也可以发现,有些路段不会被使用。政府应考虑合理进行车道拓展和充电站布局,以确保BEV可以在交通网络的所有路段上行驶,以充分利用高速公路资源。
2) 随着总投资规模加大,系统总出成本降低。不管投资规模如何变化,总有一些路段值得拓展。这一发现表明,BEV运输网络中总是存在“瓶颈”或“关键环节”。政府应该优先考虑这些环节和附近节点的基础设施建设。
3) 基于Nguyen-Dupuis网络的数值实验表明,政府具有最优投资规模。政府的过度投资不会带来交通网络的持续改善。政府应根据单位投资的效果,审慎确定车道扩建计划的投资规模。
4) 城市交通系统的可持续发展离不开城市空间结构设计和交通拥堵的缓解。在城市建设的初始阶段,良好的城市空间结构将引导城市交通向更加绿色的方向发展。世界各国政府也应将减排和缓解拥堵作为城市交通治理的重点,并促进各种绿色交通政策。鼓励市民购买电动汽车也是一种选择。
总体而言,本文可以为政府设计BEV运输网络和相关的可持续政策提供一些有用的见解。当考虑涉及BEV的网络设计问题时,政府应该关注BEV驾驶员的里程焦虑和时间价值的特征。