1. 引言
近年来,实景三维技术得到了快速发展,多种建模技术方法日趋成熟,实景三维模型能够真实、立体地表现地球空间信息,实景三维包括地形级三维、城市级实景三维、部件级实景三维 [1] ,城市级实景三维在城市中得到了越来越多的应用,实景三维技术在公路勘察设计、南水北调等重大工程也得到了深入应用,产生了良好的应用效果。基于倾斜摄影进行三维建模较为常见,一些学者做了其他探索,如,结合近景摄影、采用MVS点云数据辅助及多源数据融合等方式来提高模型完整度 [2] 。本文中对基于倾斜摄影的实景三维建模及精细化建模方法进行了研究,结合济泰高速公路项目,对实景三维技术在公路勘察设计中的应用做了进一步研究。
2. 公路勘察制图技术的演进
公路勘察制图技术经历了3个阶段:第一阶段野外实测,公路纵横断面主要依靠野外测量工作完成;第二阶段航测立体测图,随着数码航空摄影仪分辨率的提高,公路的重要工作点及横断面图采用立体采集的方法完成;第三阶段三维模型测量,机载激光雷达测量在公路三维测设中具有非常广泛的应用 [3] ,利用机载激光雷达数据建立DOM + DEM三维模型自动绘制横断面图,或者基于实景三维模型采集地物及自动绘制横断面图。伴随着测绘科技的进步,大量的外业测绘工作转移到内业开展,提高了制图效率及精度。
2.1. 航测立体法采集断面技术
作业方法:根据原始影像、空三成果、中线坐标、中桩高程等成果,逐桩在立体像对上采集地形地物等断面数据,一个断面宜在同一立体像对上采集。利用航测法进行断面采集存在适用于树木稀少地面可见地段的局限性。内业提供断面成果需外业实地核查,如遇有阴影、实景三维建模遮挡、植被落水等则要重点核实。
2.2. 三维模型采集横断面技术
在当今随着三维技术的成熟,实现了断面数据在三维模型上的软件自动采集。如,ContextCapture软件。可以利用ContextCaptureEditor的高级三维建模、横截面切割、断裂线和地形提取功能,既可以快速高效地进行建模,又可以更好地评估点云并生成更精确的工程模型,还可以生成用于展示的动画和渲染。
3. 实景三维高效建模方法
3.1. 倾斜摄影建模流程
目前,基于无人机的倾斜摄影测量技术已逐步取代传统成本高、耗时长的人工测绘方法 [4] [5] [6] 。倾斜航空摄影技术已经成为构建实景三维模型的主要手段 [7] 。在无人机或直升机等飞行平台上搭载五台高分辨率传感器同时从前后左右四个方向45˚角倾斜采集目标区域立面纹理信息和垂直下视方向的顶面信息,GPS、IMU分别获得飞行位置和飞行姿态信息并记录坐标、航高、姿态角等POS信息,获取全方位影像,三维建模流程主要包括航飞数据预处理、空中三角测量、三维模型重建等。倾斜摄影三维建模流程见图1。
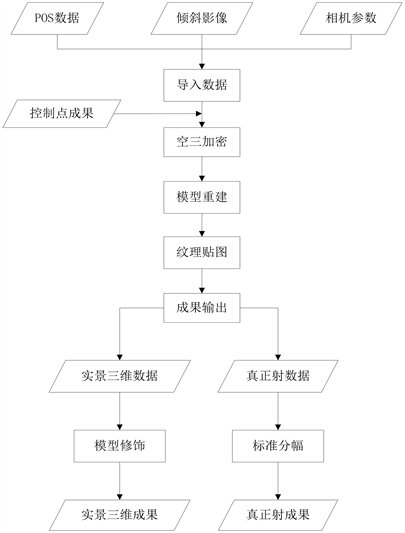
Figure 1. Flow chart of tilted photography 3D modeling production technology
图1. 倾斜摄影三维建模生产技术流程图
3.2. 内业数据处理软硬件装备
实景三维系统利用集群式高性能计算机,运用多种软件,保证空三加密顺利通过,极大提高了出模效率。
4. 精细化建模方法
4.1. 精细化建模流程
精细化建模流程包括数据预处理、空中三角测量、控制点量测、三维模型重建、模型修补和重建五个环节。水面和破碎房屋时常需要进行人工模型修补,且修补后还需要重建才能得到最终成果。
4.2. 机载LiDAR点云和倾斜摄影影像融合建模
激光雷达测量系统(Light Detection and Ranging,简称LiDAR)是集激光测距技术、惯导系统、GNSS差分定位技术、计算机技术于一体的主动式测量系统 [8] 。利用该技术,可以直接获取高精度的地面点的三维坐标。系统一般还集成高分辨率数码相机,可同时获取数码影像。经过点云附色、点云重建、空三配准,最终实现融合建模。
4.3. 实景三维模型水面修补
实景三维建模时水面往往因为光照原因匹配不到足够的特征点,导致出现破洞情况,利用实景三维模型漏洞快速修复技术进行水面修补。修补步骤:① 首先划取修饰区域范围线,通过立体选择生成修饰区域范围盒。② 选取范围内进行模型漏洞检索、网格修复、纹理映射与周围场景的匀光匀色等步骤,实现漏洞修补。
4.4. 模型单体化
1) 单体化方法
模型单体化实质是通过模型重构,在三维模型基础上实现分离效果,将要素对象变为一个可单独编辑和处理的个体,并带有需要的相关信息 [9] [10] 。目前三维模型单体化的主要方式分为逻辑单体化和物理单体化两种方式 [11] 。本文着重分析,采用倾斜摄影测量数据作为基础数据源模型,基于DP-Modeler物理单体化重建方法实现模型的单体化,重构模型在原始场景上实现分离 [12] [13] ,该方法建模有着快速和自动化程度高的优点,但由于建筑物结构的复杂性,经常会出现一些信息缺失或者物体扭曲等问题,在前述建模基础上进行人机交互式操作,对自动构建的模型的瑕疵进行修饰或者直接对物体的结构进行精细化建模,从而构建出完整度好、模型变形小、精度高的实景三维模型 [2] 。
2) 单体化步骤
物理单体化主要步骤:① 选择多角度倾斜影像,从不同角度构建建筑物模型轮廓。② 建筑物屋顶建模可采用复杂屋脊脊房几何重建,影像上获取建筑物高程与轮廓线。③ 单体化模型进行纹理自动映射。④ 纹理映射完成后检查贴图情况,存在瑕疵的进行人工修饰模型贴图。⑤ 依次构建场景内建筑单体化模型,并进行纹理自动贴图。⑥ 单体化模型与实景三维数据融合。
5. 实景三维模型在济泰高速公路勘察中的应用
5.1. 研究区域
1) 飞行参数设计:测区位于济南市至泰安市,济泰高速连接山东省省会济南市和泰安市,主线长度56 km,比较线16.8 km。倾斜影像数据获取:项目采用飞马V10垂直起降固定翼无人机,搭载D-OP4000倾斜摄影模块进行影像数据采集,单镜头有效像素6100万,航飞高度450米,影像的地面分辨率优于0.05米,共获取9211张影像。
2) 航线设计:由于测区高差大,地形情况复杂,考虑到设备及飞行安全,作业前先规划预扫航线,航高设计450 m获取测区点云数据。下视影像的航向重叠度≥80%,旁向重叠≥70%,同一航线上相邻像片的航高差不应大于10米,最大与最小航高之差不应大于20米,实际航高与设计航高之差不应大于30米。下图2为航线规划示意图。

Figure 2. Schematic diagram of route planning
图2. 航线规划示意图
5.2. DLG、DEM多类成果输出
基于获取的倾斜航空影像数据,采用集群式影像处理系统,经空三加密、点云匹配、DSM编辑、模型构建、纹理贴图等工序制作实景三维模型。在济泰高速公路施测中即建立了济泰高速公路实景三维系统,图3即为该系统平台界面截图。
1) 1:500工点图采集
随着实景三维技术在工程中的大量应用,利用三维模型测图成为重要发展方向。通过倾斜摄影拍摄的多视角影像为基础、外业像片控制测量为辅助,结合相机参数文件、POS数据文件、像控点文件,利用Context Capture软件进行三维模型的构建,采集河流岸线、建筑物、道路等地形要素,绘制DLG,图4即为采集图件样例。济泰高速公路工程复杂、地形险峻,通过实景三维技术成功地解决了常规测量的困难,可以多角度采集地物无遮挡,大大减少外业工作量。
2) 多种成果输出
济泰高速公路实景三维系统在实景三维环境下,采集编辑及符号化显示同步,并完成属性录入及图面编辑工作,测图完成后,可输出图件、点云等成果,极大地方便了工程用图及存档。下图5为点云渲染效果图。
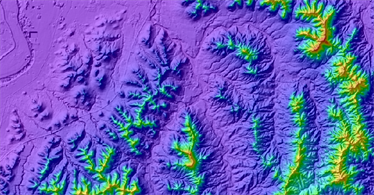
Figure 5. Standard point cloud result-elevation rendering
图5. 标准点云成果–高程渲染
3) 多源数据协同利用
支持多种数据源,如,利用通过改进的三维激光扫描车等获取的点云数据 [14] ,集成多源数据,有效弥补航摄影像中诸如城市部件等信息的缺失。
5.3. 横断面采集
工程部分线路充分利用机载地面三维激光扫描及倾斜摄影等手段获取数据并融合处理,实现断面线变坡点的自动提取,并与三维模型或激光点云叠加显示,剔除断面线中的粗差点,以提高断面的利用率,并通过交互式的方法录入变坡点的属性,快速获取断面数据,为设计提供依据。
5.4. 多种方法联合建模解决工程地质问题
在济泰高速公路实景三维系统中搭建了地质灾害评估模块,充分利用我院卫星应用中心的卫星资料,主要采用高分二号、资源三号卫星影像,建立三维模型,揭示研究区的深大断裂及滑坡错落,分析泥石流、冰川等地质灾害发育分布,绕避地质风险区,为工程前期选线提供了有力的保障。
对隧道进出口、危岩落石等区域,通过直升机倾斜摄影 + LiDAR扫描,部分直升机航飞获取数据不充分的地段,通过无人机LiDAR + 倾斜摄影 + 地面三维激光扫描的方式进行补充,联合建立实景三维模型定性判释及定量分析各种工程地质问题,如,地质滑坡体。无人机倾斜摄影三维建模在矿山地质环境治理中获取矿区地形图方面具有很大的优势 [15] 。
5.5. 实景三维选线踏勘平台
济泰高速公路实景三维系统中搭建了实景三维选线踏勘平台,在多条线路选线可行性研究阶段,利用高分辨率卫星影像和数码航空影像快速构建广域三维实景模型,解决前期方案多,海量方案比选的难题,实现了不出户对现场的虚拟踏勘,降低人员设备等风险,做出最优决策。
5.6. 沉浸式公路VR实景三维地理信息应用
工程完成后,开发了济泰高速公路VR实景三维地理信息应用平台,沉浸式公路VR实景三维地理信息应用平台设计了一种多模态多层次混合时空索引机制,建立了多尺度VR场景下的多用户、多样化交互分析技术体系,构建了沉浸式公路实景三维地理信息应用平台,实现了大范围公路VR场景的高效交互查询与可靠量测分析,实现了多模态数据的高效应用。图6为济泰高速锦绣川立交段实景漫游效果图。

Figure 6. Real roaming effect of Jinxiuchuan interchange section of Jitai expressway
图6. 济泰高速锦绣川立交段实景漫游效果
6. 三维模型精度检测及评价
三维模型的数据质量主要包括模型的数学精度、表达精细度、数据及结构正确性、逻辑关系、场景效果、资料质量。利用测区布设的15个检查点,通过实测的三维坐标与在济泰高速公路实景三维系统模型上(1:1000基础地理信息要素数据转换生产)量取的坐标,进行几何精度统计,结果见表1。

Table 1. Statistics of detection accuracy (unit: m)
表1. 检测精度统计(单位:m)
由表1可以看出:平面最大误差为0.248,最小误差为0.021;高程最大误差为0.211,最小误差为−0.019;三维模型成果可以满足相关规范的要求。
7. 结语
通过研究发现,基于无人机倾斜摄影的实景三维建模方法是一种非常高效且精度可靠的方法,正在各类工程中被越来越多地使用。三维建模技术在公路勘察设计中具有越来越广泛的应用,利用三维模型进行公路勘测设计成本低、效率高,但如何通过云服务、数据管理及分发等相关技术,建立更高精度的实时实景三维模型数据库,实现快速设计决策应用,仍有待进一步研究。另外,超大体量精细实景三维模型数据库管理及更新也将面临一定困难,实景三维建设及应用的整体技术有待进一步提高,各项标准也有待进一步完善。