1. 引言
随着能源需求的急剧增加和环境问题的日益突出,可再生能源利用引起了越来越多的关注。近年发展起来的微网技术能够整合可再生能源发电技术、电力电子技术、电力系统控制技术,微网的推广成为可再生能源利用的有效途径之一[1] 。
出于经济性和可靠性考虑,微网可运行于联网和孤岛两种模式。无论微网运行于哪种模式,都需要对微网内的DG进行有效控制,以保证微网电压和频率的稳定[2] [3] 。特别在孤岛运行时,失去了公用电网的功率支持,微网必须依靠自身的调节容量来维持电压和频率的稳定[4] ,这对DG及微网运行的控制策略都提出了挑战。
孤岛运行的微网可以采用两种控制策略。1)对等控制。即采用下垂控制方法,利用有功–频率和无功–电压下垂曲线将微网负荷分配给微网内部的DG [5] [6] 。此类方法根据DG自身局部信息进行独立控制,各DG间不需要通信,可以实现DG的即插即用,灵活方便的组成微网[7] 。但是由于下垂系数的存在,导致调节结束后新的运行点偏离DG额定工作点,产生频率和电压偏差。尽管可以通过各种手段减小遗留的压差和频差[8] ,仍无法从根本上消除,这也是下垂控制的固有缺陷[9] 。而频差的消除只能依靠微网二次频率调整[10] [11] 。2)主从控制。微网采用主从控制时,微网某一个DG控制器为主控制器,其余为从控制器。主控单元采用U/f控制以稳定微网的电压和频率[12] ,从控单元采用PQ控制以使其输出功率跟踪参考值变化。如果微网主控单元的DG容量足够大,通常可以将电压和频率稳定在参考值,其做法是采用PI控制器实现U/f控制[13] 。此类控制策略中的控制器参数多根据经验值选取,或采用试探法得到。这就导致了对具体的微网系统可能失去了最优参数下的运行方案。并且自然变动电源的输出功率受天气影响较大,加之负荷波动,都可导致微网运行状态的变化。此时若采用恒定的PI控制器参数,通常不能得到理想的效果[14] 。
本文针对主从控制中采用U/f控制的主控单元的PI控制器参数不易选取的问题,提出了一种在线整定参数的电压电流双闭环的PID控制器结构。运用MATLAB中的M文件来编写神经网络算法,通过搭建S-function功能模块调用该文件,并将S-function功能模块嵌入到仿真模块中。
2. 基于PI结构的控制器模型
作为研究对象,本文以图1所示的微网结构为例。该微网包含3个DG和3个本地负荷。微网孤岛
运行时采用主从控制,DG1为主控制单元,采用U/f控制;DG2和DG3为自然变动电源,为最大程度利用自然资源,体现微网运行的经济效益和社会效益,采用PQ控制。作为主导电源,应具备容量大、响应迅速的特性。本文采用分布式电源与储能单元的混合系统作为主导电源。各DG均假设为直流源或经整流后的直流源,经电压型逆变器、滤波电路、交流线路连接到微网交流馈线。
目前主控制单元通常采用U/f控制,其控制策略如图2所示。其中Lf、Cf为滤波电感和电容,串联小电阻Rn用以增加阻尼抑制振荡。为得到SPWM驱动电路的电压信号,采用电压电流双闭环控制。对于电压外环,经过abc/dq变换后,直流电压ud、uq与给定电压参考值udref、uqref比较形成偏差信号,经控制器调节后作为d、q轴电流参考值信号。对于电流内环,三相输入电流采样后经坐标变换形成d轴和q轴分量,分别与各自参考值比较,其偏差信号经控制器调节生成SPWM驱动电路的参考值信号。
目前,在电压电流双闭环控制中,通常采用PI控制器,其参数根据经验值选取。研究表明[15] ,电流控制器比例参数Kip值越大,电流环的动态响应越好,但是Kip过大会导致系统稳定性变差。而电压控制器比例参数Kvp越小逆变器的输出阻抗阻性越明显;Kvp越大其感性阻抗的频带越宽。同样,积分参数的选取对逆变器输出阻抗的特性也有显著的影响。换言之,DG输出的稳态特性和动态特性取决于控制器的参数设计,而这些参数的选取又需要经过多次试探或依据经验值。并且当控制器参数为固定值时,难以满足微网孤岛运行中负荷大幅度变化及自然变动电源波动引起的电压幅值和频率的调整要求。因此有必要采用合理的控制器结构和参数整定方法,实现微网孤岛运行时电压和频率的稳定控制。
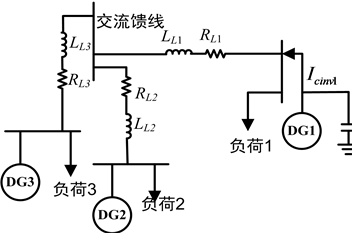
Figure 1. Structure of the microgrid
图1. 微电网结构
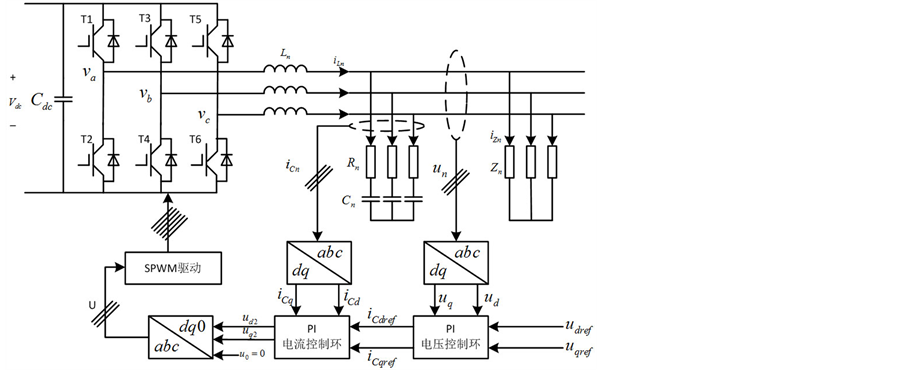
Figure 2. Schematic of the U/f control
图2. U/f控制策略框图
3. 基于BP神经网络学习算法的PID控制
3.1. 控制器总体结构
神经网络具有任意非线性逼近能力,对于非线性系统具有良好的适应性[16] 。本文将传统的电压电流双闭环控制中的PI环节加以改进,加入微分环节并引入BP神经网络算法优化控制器参数,将其设计成具有自适应调节功能的电压电流双闭环PID控制器,其结构如图3所示。
该控制器将下垂控制器输出的三相参考电压信号分解成d、q轴参考电压信号,并将其作为双环控制的输入参考信号,然后分别进行自适应在线跟踪调整。以d轴信号为例,通过比较n时刻d轴电压的期望输出Vdref(n)与实际输出Vd(n),计算电压误差信号 ,然后计算神经网络各层神经元的输入量和输出量。输出层神经元的三个输出即为双闭环PID控制器三个可调参数Kp、Ki、Kd。在此基础上进行BP神经网络的学习,在线调整突触权值,从而实现PID控制参数自适应调整。随着控制器不断变化的输出信号作用于系统对象可以不断地调整微电网主电源的输出电压。不断地迭代重复以上过程,使实际值最终追踪到参考值。
,然后计算神经网络各层神经元的输入量和输出量。输出层神经元的三个输出即为双闭环PID控制器三个可调参数Kp、Ki、Kd。在此基础上进行BP神经网络的学习,在线调整突触权值,从而实现PID控制参数自适应调整。随着控制器不断变化的输出信号作用于系统对象可以不断地调整微电网主电源的输出电压。不断地迭代重复以上过程,使实际值最终追踪到参考值。
由于增加了微分控制环节,系统的动态性能得到了改善。对于d、q轴电压输入信号需要不断的调整6个控制器参数:Kdp、Kdi、Kdd及Kqp、Kqi、Kqd。其电压环传递函数为:
 (1)
(1)
 (2)
(2)
其中,K1、K2为电流环d、q轴控制器参数;u为电压环的输出信号。
3.2. 基于BP神经网络算法的参数整定
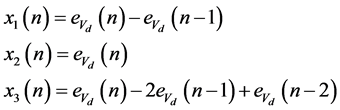
神经网络采用增量式PID控制,如图4所示,其输入变量分别(仅列出d轴变量):
 (3)
(3)
式中, ,为控制系统的误差;x1(n)为稳态误差,在稳态负荷分配中起主要作用;x2(n)反映误差累计的效果,相当于连续系统中的积分环节;x3(n)反映误差变化速率,相当于连续系统中的微分环节,用以改善系统的动态性能。
,为控制系统的误差;x1(n)为稳态误差,在稳态负荷分配中起主要作用;x2(n)反映误差累计的效果,相当于连续系统中的积分环节;x3(n)反映误差变化速率,相当于连续系统中的微分环节,用以改善系统的动态性能。
增量式数字PID的控制算法为:
 (4)
(4)
其中,
 (5)
(5)
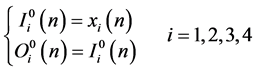
本文采用三层BP神经网络结构。为充分体现PID控制信号的特性,选择4个变量作为神经网络的输入层神经元,即:电压期望输出Vdref(n)、电压实际输出Vd(n)、电压误差信号以及阀值。输入层节点的输入、输出信号为
 (6)
(6)
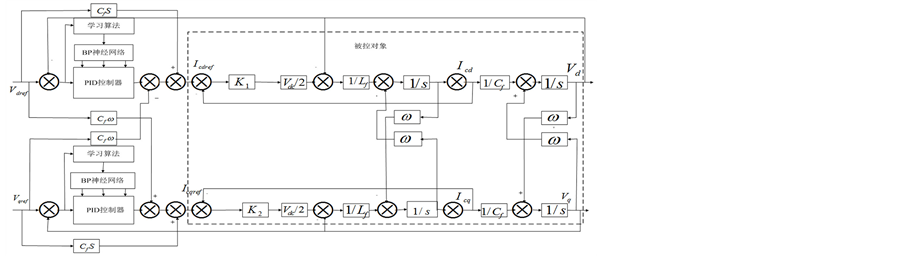
Figure 3. Voltage and current double-loop controller based on BPNN Algorithm
图3. 基于BP神经网络算法的电压电流双闭环控制器
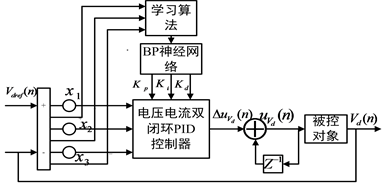
Figure 4. Voltage and current double-loop control system base on BP neural network on d-axis
图4. d轴BP神经网络电压电流双闭环控制系统
其中,i为输入层节点号;I为输入层节点的输入量,O为输入层节点的输出量;上角标0、1、2分别代表输入层、隐含层和输出层。
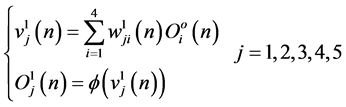
对于隐含层,其节点数过多会增加计算量,过少则不能精确逼近给定函数。经测试,本文中隐含层的节点数取5。网络隐含层的诱导局部域和输出分别为:
 (7)
(7)
其中j为隐含层节点号;wji为突触权值; 为隐含层神经元激活函数,此处取双曲正切函数:
为隐含层神经元激活函数,此处取双曲正切函数:
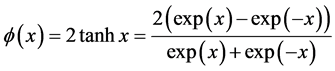 (8)
(8)
输出层神经元个数选为3,分别对应PID控制器的三个可调参数Kp、Ki、Kd。输出层的诱导局部域和输出分别为
 (9)
(9)
其中p为输出层节点号;wpj为突触权值; ,
, ,
, 。由于这三个参数不能为负值,输出层的激活函数取指数函数与非负的sigmoid函数组成的复合函数:
。由于这三个参数不能为负值,输出层的激活函数取指数函数与非负的sigmoid函数组成的复合函数:
 (10)
(10)
4. 算例分析
利用simulink搭建如图1所示的微网模型,验证采用BP神经网络算法整定参数的PID控制的有效性。其中,通过搭建S-function功能模块调用M文件编写的神经网络算法。微网额定电压为380V,额定频率为50 Hz。计算中采用标幺值,基准电压为310 V,基准功率为10 kVA。各交流线阻抗均为0.641 + j0.002 Ω。微网采用主从控制策略,DG1作为主控制单元采用U/f控制,稳定运行时输出功率为10 + j0 kVA;DG2和DG3作为从控制单元采用PQ控制,初始功率参考值分别为8 + j0 kVA、10 + j2 kVA。负荷1由三个大小为5 + j0.628 Ω的负荷并联而成,负荷2、3分别为10 + j12.56 Ω、10 + j12.56 Ω。
在0.2秒和0.4秒时,分别切除负荷1处的一个负荷。采用文[17] 的方法(以下简称方法1)和本文所提的方法(简称方法2)分别对微网的电压和频率响应进行仿真分析。采用方法1在孤岛运行模式下微电源由功率控制环节与电压电流双闭环控制结构构成。电压控制环采用电压有效值并且采用比例积分控制,能够快速有效地生成调制信号,控制参数易于设计。采用方法1在4组随机选取的PI控制器参数下分别计算。其中,KI = 10、KP = 50的情况下微网电压和频率控制效果最好,如图5、图6所示。采用方法2搭建S-function功能函数,构造BP-PID控制器。计算中取学习率η = 0.28,惯性系数α = 0.04。采样时间为0.001 s,权值系数初始值在区间[−0.5, 0.5]上随机选取,运行稳定后用稳定权值代替随机值,其电压和频率曲线如图7、图8所示。
对比图5、图7可知,采用方法1时稳态运行电压比较稳定;当负荷发生波动时,也不会产生较大的电压暂降和电压骤升,两次电压波动分别为1.018~1.140、1.020~1.093,波动范围分别是0.122、0.073。而方法2通过自适应调整PID控制器参数,能在稳态运行和负荷变化时进一步改善电压稳定性,两次电压波动分别为1.017~1.050、0.998~1.045,波动范围分别是0.033、0.047,波动范围明显小于前者。因此从电压控制效果来看,方法2优于方法1。
图6、图8为2种方法下的微网频率波形。总体来看,2种情况下的频率响应特性均较好。相比较而言,稳态运行时方法1的频率波动略大,两次频率波动约为0.07 Hz、0.06 Hz,而方法2两次频率波动约为0.02 Hz、0.03 Hz,基本实现了频率的恒定控制。可见采用自适应调整参数的PID控制器不但可改善系统的动态性能,还能保证稳态运行时的频率稳定控制,这对孤岛情况下维持恒定的系统电压和频率是极
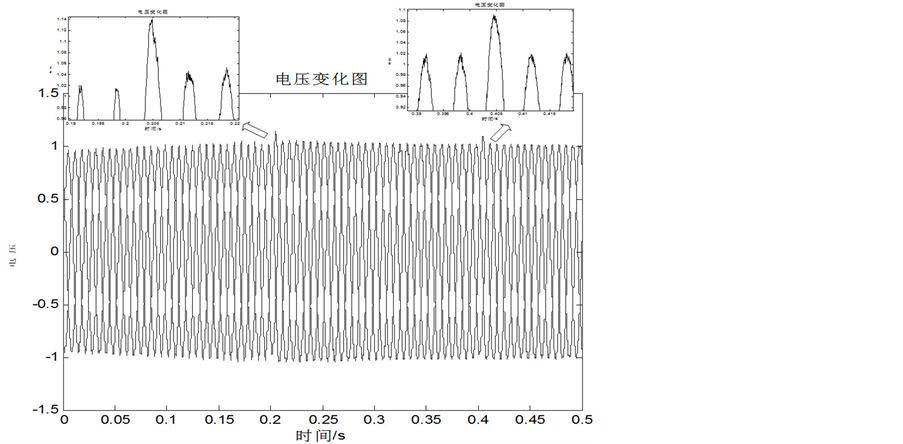
Figure 5. Output voltage of DG1 using Method 1
图5. 采用方法1时DG1的母线电压
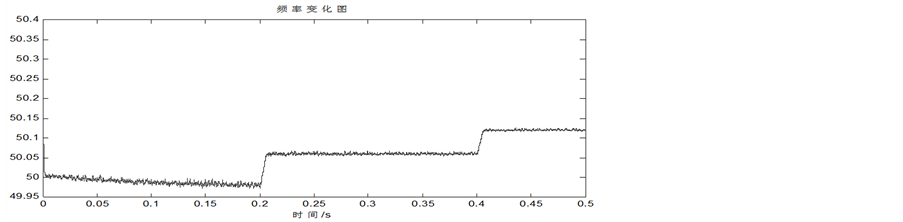
Figure 6. Microgrid system frequency using Method 1
图6. 采用方法1时的微网系统频率
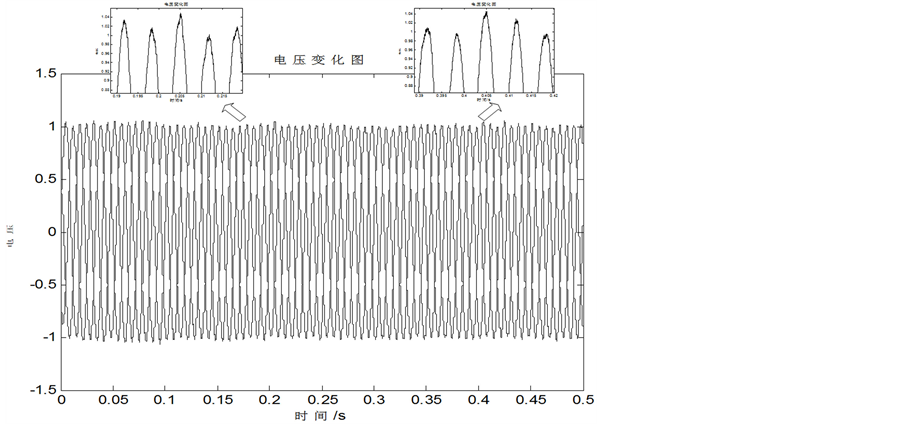
Figure 7. Microgrid system frequency using Method 1
图7. 采用方法1时的微网系统频率
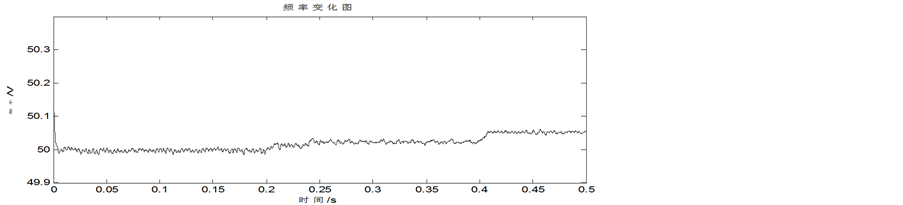
Figure 8. Microgrid system frequency using Method 2
图8. 采用方法2时的微网系统频率
为有利的。
5. 结论
本文提出了一种基于BP神经网络算法的电压电流双闭环控制策略,设计了可自适应调整参数的PID控制器。研究表明,基于BP神经网络算法的电压电流双闭环结构的控制策略可在微网孤岛运行时进一步提高其电压和频率的稳态性能;而在系统出现较大干扰时能也可迅速响应,较好地抑制电压和频率波动,改善电压和频率的动态性能。
基金项目
浙江省自然科学基金资助项目(Y107191)。