1. 引言
1.1. 传统飞艇简介
飞艇是人类发明的第一种可以自由控制的航空飞行器。如今飞艇作为一种重要的飞行平台在多个领域发挥着重要作用。为了发挥飞艇的优势,要求飞艇能够长时间稳定的滞空,但由于高空作业环境常常会出现风向和风速不定期的改变,加上由于飞艇体积大、惯量大、操控性较差,易受外界扰动,所以要求飞艇的工作环境相对空旷,须在较大空间内实现飞艇的控制。
1.2. 传统飞艇结构
飞艇从机械结构上来说,一般由艇体、尾面、吊舱和推进装置等部分构成,如图1所示。
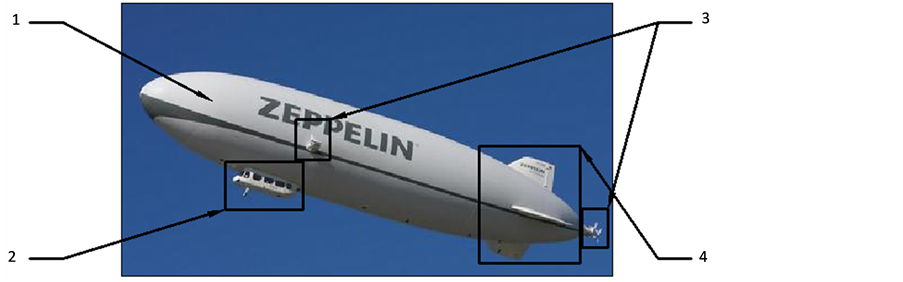 1. 艇囊;2.吊舱;3.推进装置;4舵面
1. 艇囊;2.吊舱;3.推进装置;4舵面
Figure 1. The diagram of airship structure
图1. 推进系统结构图
艇体在飞艇中是最大且最重要的部分,内装有储存工作气体,一般呈流线型,以减小前行阻力,降低迎面来凤影响。飞艇一般分为硬式和软式和半硬式三种主要区别在于艇体的外壳材料 [1] 。硬式飞艇代表为德国齐柏林飞艇,半硬式飞艇代表有俄罗斯的“MD-900”飞艇,软式飞艇代表有美国的sentinel 1000飞艇。
飞艇的尾面分为水平尾面和垂直尾面,各尾面又分为安定面和控制舵面,用来控制飞艇姿态和改变飞行状态 [2] 。
吊舱为载人、载物平台,载人飞艇中为人类提供舒适的乘坐环境,货运飞艇或无人飞艇中主要提供载物仓。
推进装置为飞艇的动力来源,一般载人飞艇使用燃油动力引擎,小型无人飞艇一般使用“锂电池 +电机”的形式。
1.3. 室内飞艇设计的起源
近些年随着大疆、零度、极飞等一批无人机公司的出现,影视航拍、监控、农药喷洒、航磁探矿等诸多领域引入了无人机元素。但市面上的无人机大部分都是螺旋桨外露设计,高速旋转的螺旋桨在遇到人或其他物体时会造成严重的伤害,所以现有无人机的作业环境限于空旷无人的环境。但随着对技术要求的逐渐提高,已有在室内环境、人群上方飞行的需求,但现有无人机不能够满足此场景的应用。若能够设计出来一种安全、静音、长时间稳定续航的飞行器,就能够填补市场空白。在这样的前提下,提出了将飞艇引入这样的环境中,代替现有的多旋翼飞行器,来安全、高效的完成航拍、转播、监控的功能。
2. 无舵面飞艇的设计
推进系统结构如图2所示。
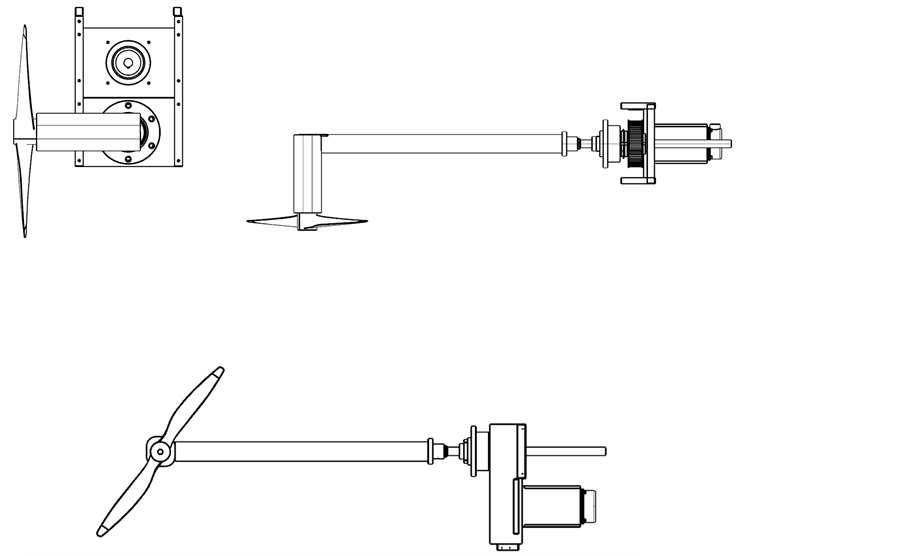
Figure 2. The diagram of propulsion system structure
图2. 推进系统结构图
2.1. 三维推进装置的设计
2.1.1. 动力系统选择
动力系统包含螺旋桨、电机、电机调速器、电池等组成,为飞艇姿态调整、运动状态改变提供动力。
在飞艇设计中,动力系统的选择具有一定技术难度,要考虑到飞艇的推重比、电机和螺旋桨的效率、续航时间等参数。在传统飞艇设计中,巡航推重比达到0.1 [3] ,则飞艇有较好的可操控性。在本方案中,类似地将推重比设置为0.1。本方案中飞艇重量为10 kg,则两个推进装置需分别提供500 g左右的推力。4010无刷直流电机可以满足推力需求,且力效高达10.8 g/W (500 g推力下),单个电机重量较轻,在170 g左右。无刷电机驱动器的选择根据电机的参数而定,在这里选择4s (耐压18 V) 30 A (180 s)的无刷电机驱动器。螺旋桨使用1448碳纤维螺旋桨。电池使用4s锂电池,标准电压为14.8 V。为满足动力和安全两个要求,使用松下18650GA电芯进行电池组焊接,整块电池的能量密度能够达到200 wh/kg以上 [4] ,同时能够满足大功率放电(3c)。综上,可以估计整套推进系统的重量约为1500 g。
2.1.2. 支撑结构设计
飞艇整体的支撑结构由碳纤维管材和铝加工件连接构成。根据需求,在除推进系统的支撑杆外,其他均采用直径15 mm壁厚0.8 mm的碳纤维管材,推进系统的支撑杆选用直径15 mm壁厚1.0 mm的管材。通过管材围成飞艇吊舱的外形骨架。碳纤维的特点是结构强度高,重量轻,尤其是管材,这两方面优势更为突出。能够有效的承受拉力、压力以及传到扭矩 [5] 。支撑系统重量约为800 g。
2.1.3. 转动系统
转动系统负责将电机的朝向改变,从而向飞艇提供矢量动力 [6] 。在本方案中,通过转动系统的设计,可以使电机在半球面任意转动,为飞艇提供多方向的推力。
转动系统中,因为在飞艇的控制中,不需要有特别快的响应速率,更需要的是大扭矩和动作的精准性。所以这里采用了无刷电机伺服器,配有1:400的减速器,扭矩在15 kg/cm左右,足以应对转动系统的需求。而且这种伺服器的重要要较其他伺服器轻许多。单个重量只有15 g左右。
2.2. 飞艇整机设计
材料选择:艇囊材料选择pvc,结构强度大,气密性好,韧性好,不易破损,密度小,耐高温。机身结构支撑件材料为碳纤维和铝合金。碳纤维管强度高,重量轻。铝合金易加工,成本较低。
气动布局:三个安定面,安定面上无舵面。为避免推进系统的推力产生力矩改变飞艇姿态,推进系统安装在飞艇靠近重心的位置(由于无人飞艇吊舱重量较轻,所以中心位置靠近艇囊中心位置)。艇囊成流线型,安定面为对称翼形(图3)。
吊舱内装有载荷,种类包含云台相机、图传发射机、灯光设备、条幅等。
2.3. 运动设计
由于这种飞艇要实现前飞、退飞、左右转弯、侧飞等动作,要求飞艇的结构有高度的对称性。所以我设计的飞艇的尾面并不在尾部,而是将尾面前移至飞艇中部。尾面为对称翼形,并无向某方向偏向 [7] 。
2.4. 室内环境特征
室内环境与室外环境有着很大的不同处,尤其像国家体育馆等带有屋顶的密闭空间。一般这种环境中,气温的变化范围较小,一般在0℃~30℃。气流一般为固定方向气流,不会有很大变化。但由于一般屋顶有空调出风口,人为的造成了室内流向固定的气流。而且有着较多的风切变。这种空调出风口造成的现象是每个出风口向下垂直方向会有5 m左右的向下气流。
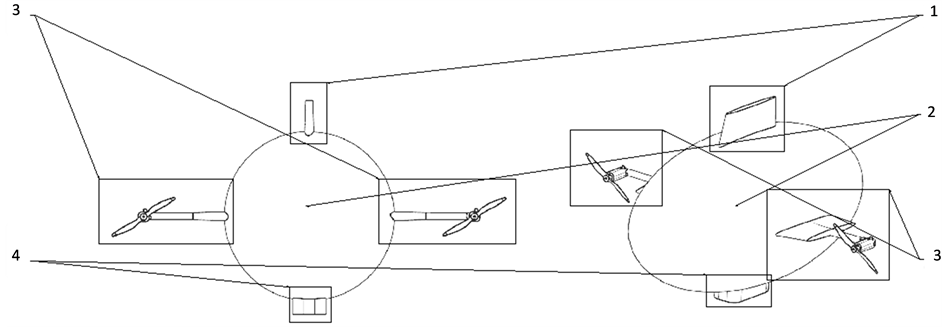 1.安定面;2艇囊;3.推进装置;4.吊舱
1.安定面;2艇囊;3.推进装置;4.吊舱
Figure 3. The diagram of the without rudder surface of airship structure
图3. 无舵面飞艇结构示意图
3. 无舵面飞艇运动模型的研究
3.1. 坐标系
3.1.1. 地面坐标系
地面坐标系是与地球表面相对固定的的一种坐标系。地面坐标系的原点 ,位于地面任意固定点,
,位于地面任意固定点, 轴指向地平面某任意方向(本文选取飞行器初始航向在地面投影方向);
轴指向地平面某任意方向(本文选取飞行器初始航向在地面投影方向); 轴铅垂向下;
轴铅垂向下; 轴垂直
轴垂直 平面,由右手定则确定 [8] 。
平面,由右手定则确定 [8] 。
3.1.2. 气流坐标系
气流坐标系的原点 位于飞行器质心(本文中将风轴系原点与体轴系重合,便于计算),
位于飞行器质心(本文中将风轴系原点与体轴系重合,便于计算), 轴始终指向飞行器空速方向;
轴始终指向飞行器空速方向; 轴位于飞行器对称平面内,垂直于
轴位于飞行器对称平面内,垂直于 轴,指向下;
轴,指向下; 垂直于
垂直于 平面,指向右。后文中用到的气动力三个分量(升力
平面,指向右。后文中用到的气动力三个分量(升力 ,阻力
,阻力 ,侧力
,侧力 )是沿气流坐标系三轴定义的。
)是沿气流坐标系三轴定义的。
3.1.3. 机体坐标系
机体坐标系是固联于飞行器并与其共同运动的动坐标系。其原点位于飞行器质心处。 轴取在飞行器对称平面内,并平行于机身轴线,指向前;
轴取在飞行器对称平面内,并平行于机身轴线,指向前; 轴也取在对称平面内,垂直于
轴也取在对称平面内,垂直于 轴,指向下;
轴,指向下; 轴垂直于对称平面,指向右。后文中用到的气动力矩三个分量(滚转力矩
轴垂直于对称平面,指向右。后文中用到的气动力矩三个分量(滚转力矩 ,偏航力矩
,偏航力矩 ,俯仰力矩
,俯仰力矩 )即以机体坐标系下的三轴定义。
)即以机体坐标系下的三轴定义。
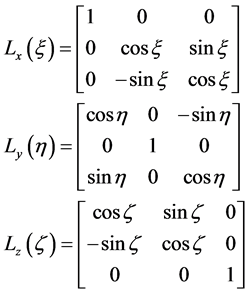
3.2. 任意两个三维坐标轴系的转换
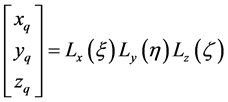
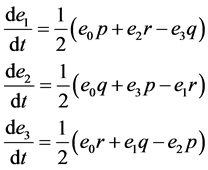
对于任意两个原点重合的三维笛卡尔坐标系,两者关系可以用三个欧拉角 确定,即按顺序通过三次旋转就可以重合(图4)。
确定,即按顺序通过三次旋转就可以重合(图4)。
由此坐标系 中的坐标可通过如下关系转换至坐标系
中的坐标可通过如下关系转换至坐标系 下
下
 (3.1)
(3.1)
其中:
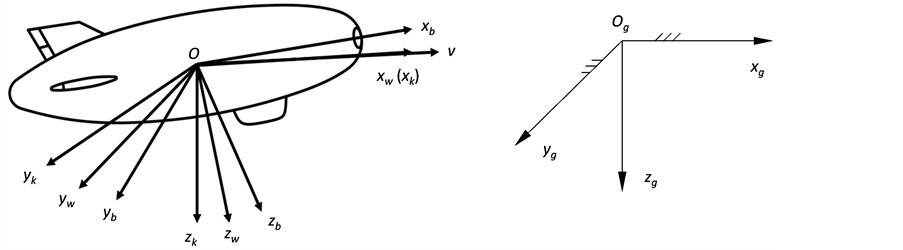
Figure 4. The diagram of ship coordinate system
图4. 机体坐标系示意图
 (3.2)
(3.2)
3.3. 质心运动学方程
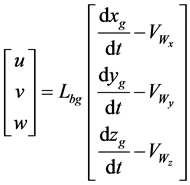
质心运动学方程可以对飞机的空间运动轨迹进行求解,从而对飞机的运动状态进行分析,因而需要将动力学方程求解出来的飞行速度投影到地轴系上 [9] ,得到质心运动学方程如下:
 (3.3)
(3.3)
其中 为体轴系下的飞艇速度分量,
为体轴系下的飞艇速度分量, 为体轴系向地轴系转换的转换矩阵,与
为体轴系向地轴系转换的转换矩阵,与 互为转置。
互为转置。
考虑风的影响 [10] ,飞艇对地速度失量 、空速失量
、空速失量 以及当时当地(飞行器质心处)的风速失量
以及当时当地(飞行器质心处)的风速失量 构成下面的三角形关系式:
构成下面的三角形关系式:
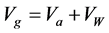 (3.4)
(3.4)
于是有风的情况下就变成了如下形式:
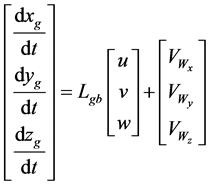 (3.5)
(3.5)
变形后即得到如下形式:
 (3.6)
(3.6)
式中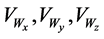 为风速在地轴系下的三个分量。得到了飞艇的机体轴下的速度
为风速在地轴系下的三个分量。得到了飞艇的机体轴下的速度 ,就可以由下式得到飞艇的空速
,就可以由下式得到飞艇的空速 ,迎角
,迎角 和侧滑角
和侧滑角 [11] 。
[11] 。
 (3.7)
(3.7)
3.4. 绕质心转动运动学方程
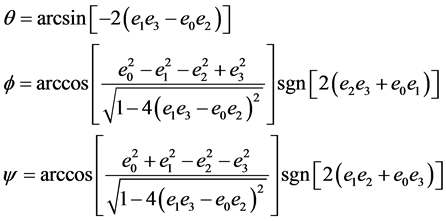
飞机的姿态角是通过机体轴系相对于地面坐标系的三个欧拉角 来表示的。其变化规律与飞机的旋转角速度
来表示的。其变化规律与飞机的旋转角速度 密切相关(图5)。有两种方法可以建立他们之间的相互关系,分别为欧拉角表示法和四元数表示法。由于欧拉角表示法没法表示出俯仰角
密切相关(图5)。有两种方法可以建立他们之间的相互关系,分别为欧拉角表示法和四元数表示法。由于欧拉角表示法没法表示出俯仰角 超过90度的运动,因此本文在进行仿真计算时选用了四元数表示的办法。
超过90度的运动,因此本文在进行仿真计算时选用了四元数表示的办法。
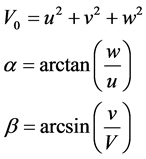
首先定义四元数,考虑的是空间两个同原点的坐标系 和
和 ,
, 和
和 总有一个固定的轴OR存在,可以使坐标轴
总有一个固定的轴OR存在,可以使坐标轴 绕其转动一个角度
绕其转动一个角度 与
与 重合,该转轴OR与空间坐标形成三个角度
重合,该转轴OR与空间坐标形成三个角度 ,于是四元数可以被表示成为:
,于是四元数可以被表示成为:
 (3.8)
(3.8)
对于四元数有如下约束:
 (3.9)
(3.9)
可以证明,四元数与欧拉角速率之间存在如下微分方程式(证明过程从略) [12] :
 (3.10)
(3.10)
Figure 5. The diagram of rotating coordinate system
图5. 旋转示意图
通过对上式求积分,就可以得到四元数的时间响应,再由下面的公式反算三个欧拉角为:
 (3.11)
(3.11)
其中 函数的含义是:当自变量为正时,函数值取+1;当自变量为负值时,函数值取−1。利用四元数求三个欧拉角在时
函数的含义是:当自变量为正时,函数值取+1;当自变量为负值时,函数值取−1。利用四元数求三个欧拉角在时 不会出现奇异情况,这样就能避免优化过程中出现极端情况的时候优化程序
不会出现奇异情况,这样就能避免优化过程中出现极端情况的时候优化程序
的报错,减小了优化出错的可能性。
致谢
在完成本文设计的过程中,我的朋友杨威在飞艇方案的机械结构上提出了很多改进意见和建议,最终形成了此方案。我的同事马聪,在飞艇模型的建立上给予了莫大的帮助,后又协助我将模型导入飞行模拟软件中进行仿真飞行,对于设计方案的修改提供了支持。我还要真诚的感谢我的导师王磊老师和我的同学浮颖彬,没有他们的支持和帮助我也不能完成此文章。