1. 引言
压缩感知技术在信号重构问题中有着广泛的应用,而稀疏性是压缩感知中的重要问题。2006年,E. Candes,J. Romberg和T. Tao在文献 [1] 中提出,若矩阵A满足RIP条件,则可以通过下述模型(1)精确恢复信号:
(1)
其中
为观测矩阵,
为原始信号,
表示0范数,即稀疏信号x中非零元素的个
数。但该问题是NP-hard问题 [2] ,因此学者们考虑了如下的凸优化问题:
(2)
(2)称作1范数模型,在适当的假设下,由文献 [3] 的定理1.3可知,模型(2)可以较精确地恢复原始信号。
由于问题(2)的凸性,有许多有效算法可求解之,如基追踪法 [4] ,迭代阈值方法 [5] 。近年来,p (
)拟范数模型受到学者们的青睐,因p范数较1范数更能得到稀疏解,尤其是徐宗本提出p = 0.5时具有较好的计算效果 [6] 。p范数模型为:
(3)
由于
,故问题(3)为非凸问题,且与0范数同样是NP-hard问题。文献 [1] 中作者利用光滑逼近
函数进而光滑逼近p范数。受到该文的启发,本文利用文献 [7] [8] 中的光滑逼近
函数技术光滑逼近p范数,且结合p范数与2范数各自的优点,利用p范数与2范数加权的方法弥补由于p过小而引起的数值不稳定,从而应用共轭梯度法进行信号恢复,并在适当的假设下,证明了算法的全局收敛性,同时进行了数值测试,测试结果证明我们的方法是有效的。
2. 模型及其性质
我们考虑如下模型:
其中
。该问题的正则化问题为:
(4)
其模型较p范数模型(3),加入了一项2范数项进行调节p过小时目标函数的非凸程度,以p = 0.3时为例,依次做
时的范数图像,如图1至图4所示:
可见通过适当调整
取值在保证产生稀疏解的同时可以增强问题的凸性。由p范数的定义
可知,由于
的非光滑性,导致
是非光滑的,因而我们通过光滑绝对值函数
对
进行光滑逼近。文献 [8] 中对绝对值函数提出如下两个光滑函数:
及
(5)
利用
,我们得到的模型为:
(6)
其中,
(7)
为叙述方便,令:
(8)
计算函数
的梯度:
(9)
引理1 设D为
中的紧集,若
是D上的光滑函数,则h在D上满足Lipschitz条件,即:
其中
称为Lipschitz常数。
证明:对
,由
的光滑性及Lagrange中值定理可知:
,其中
位于
之间。
因D为紧集,则
,
,从而
。
引理2设
为紧集,
在D上Lipschitz连续,则
在D上Lipschitz连续。
证明:因D紧且f和g均在D上Lipschitz连续,则
,满足:
对
,有:
引理3 若
由(5)定义,则
在紧集D上Lipschitz连续。
证明:对于
的情况,我们有:
当
时,有:
当
时,有:
当
时,有:
当
时,有:
当
或
时,有:
令
,同理可证存在常数
使得
在紧集D上Lipschitz连续。
最终令
,我们得到:
引理4 函数
由(7)所定义,则
在紧集D上Lipschitz连续。
证明:计算得:
因
连续可微,且
,我们有
和
均连续可微。假设集合D有界,则D为紧集,由引理1知
及
在紧集D上Lipschitz连续。
同时由引理3可知
在紧集D上Lipschitz连续,则由引理2可知:
在紧集D上Lipschitz连续,记Lipschitz常数为
,那么有:
即
在紧集D上Lipschitz连续。
引理5
在紧集D上Lipschitz连续。
证明:计算得
,由引理1可知
在水平集上光滑,则
在紧集D上Lipschitz连续,记Lipschitz常数为
,则:
引理6 目标函数梯度
由(9)所定义,则
在紧集D上Lipschitz连续。
证明:计算得
,则:
3. 基于非精确线搜索的三项共轭梯度法
求问题
的共轭梯度法的具体迭代过程如下:
其中
代表当前迭代点,
代表当前搜索方向,
代表搜索步长,
,不同的
代表不同
的共轭梯度算法。Shouqiang Du和Miao Chen在文献 [9] 中提出了一种新型三项共轭梯度法。具体迭代过程如下:
其中新加入项
可以每步迭代确保目标函数值严格下降,使计算效率更高.本文将利用该共轭梯度法解决信号恢复问题。
算法1 (基于非精确线搜索的共轭梯度法)
步0给出初始参数
,置
。
步1若满足终止准则
,停止计算,输出结果
;否则,转步2。
步2计算搜索方向:
其中,
步3令
,同时满足:
步4令
,计算
。
步5令
,转步1。
假设1令
为常数,假设水平集
是紧集。
定理1 若
是由算法1产生的序列,则:
证明:由文献 [9] 中定理6,本文引理6及假设1可得。
4. 数值实验
本节实验在Intel Core i7-6500U 2.50GHz CPU,8G RAM,Windows10 64位操作系统,MATLAB R2016a环境下进行,所有数值实验结果为测试十次取平均值。
我们对两个不同的绝对值近似函数
和
分别在信号维数n取2048,4096,8192三种情况下,测试随机信号在无噪声和存在噪声干扰时的恢复效果.通过对比信号恢复时间t,相对误差e和迭代步数k来比较范数p和R对算法对信号恢复效果的影响。参数取值如下:A为
的随机高斯矩阵,x为n维随机初始信号,
为初始点,
是一个平均值是0,标准差是0.01的对观测向量b的噪声干扰,p取0.3,0.4,0.5,0.6,R取0,1,10,100 (当R = 0时代表2范数项为0,即目标函数为p范数模型),其他参数取值如下:
1) 我们先对绝对值近似函数
的信号恢复问题进行数值实验,结果如表1至表6所示:

Table 1. Signal dimension n = 2048, no noise interference
表1. 信号维数n = 2048,无噪声干扰
Table 2. Signal dimension n = 2048, Gauss noise interference
表2. 信号维数n = 2048,高斯噪声干扰
Table 3. Signal dimension n = 4096, no noise interference
表3. 信号维数n = 4096,无噪声干扰
Table 4. Signal dimension n = 4096, Gauss noise interference
表4. 信号维数n = 4096,高斯噪声干扰
Table 5. Signal dimension n = 8192, no noise interference
表5. 信号维数n = 8192,无噪声干扰
Table 6. Signal dimension n = 8192, Gauss noise interference
表6. 信号维数n = 8192,高斯噪声干扰
2) 我们再对绝对值近似函数
的信号恢复问题进行数值实验,结果如表7至表12所示:
Table 7. Signal dimension n = 2048, no noise interference
表7. 信号维数n = 2048,无噪声干扰
Table 8. Signal dimension n = 2048, Gauss noise interference
表8. 信号维数n = 2048,高斯噪声干扰
Table 9. Signal dimension n = 4096, no noise interference
表9. 信号维数n = 4096,外界无噪声干扰
Table 10. Signal dimension n = 4096, Gauss noise interference
表10. 信号维数n = 4096,高斯噪声干扰
Table 11. Signal dimension n = 8192, no noise interference
表11. 信号维数n = 8192,无噪声干扰
Table 12. Signal dimension n = 8192, Gauss noise interference
表12. 信号维数n = 8192,高斯噪声干扰
5. 主要结论
通过在不同维度n = 2048,4096,8192下做信号恢复效果分析,我们主要得出以下结论:
1) 相对于p范数模型,
范数模型具有更好的恢复效果,二者在时间和迭代步数相近的情况下,
范数模型对初始信号的精度更高。
2) 做
的值对信号恢复效果影响的横向对比,
的取值对信号恢复的时间和迭代步数影响并不明显;但是
或
时信号的恢复具有更高精度,这是由于当
取值为1~10时2范
数项对p范数的调节使得函数模型的非凸性程度降低,因而提高信号恢复的精度。
3) 做p的值对信号恢复效果影响的纵向对比,显然范数p = 0.6时信号恢复的精度最高,p = 0.3时精度最低。
注:1) 文献 [10] 中提出的模型为
即利用
范数加权从而产生稀疏阶,而本文考虑p范数比1范数更易得到稀疏解,从而利用
范数加权进行信号恢复。
2) 文献 [10] 中的光滑化绝对值函数是文献 [8] 中
。
3) 文献 [11] 中的模型为:
而
较
不易产生稀疏解。取p = 0.3,R = 100对比图形如图5和图6所示:
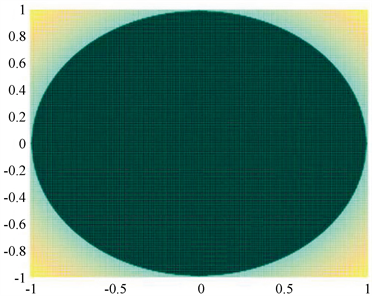
Figure 5.
norm image
图5.
范数图像
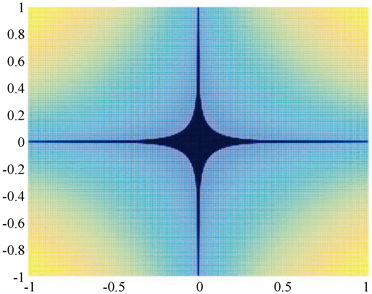
Figure 6.
norm image
图6.
范数图像
基金项目
内蒙古自然科学基金(2018MS01016)。
NOTES
*通讯作者。