1. 引言
机载激光LiDAR是一种机载激光探测和测距系统,可以量测地面物体的三维坐标。它集成激光器、GPS和惯导(IMU),是一种主动式对地观测系统 [1]。一种新兴的测绘手段,不受阴影和植被覆盖的影响,可以广泛的应用于现代测绘工作中。
随着激光雷达的快速发展,该技术也被迅速的运用于各个领域之中。因激光特有的高穿透性,可透过一定厚度植被获得其覆盖区域下的地面数据,能够弥补传统航空摄影测量技术的不足,其也被迅速的用于测量和地质勘测中。尤其在地势险峻且人烟稀少的未开发地带,植被的覆盖区域相当广阔,仅依靠传统的航空摄影测量很难获取到高精度的地表数据,因此依靠机载激光雷达技术来获取高植被覆盖区域点云数据,且将所获得数据进行高效处理,已经为当下激光雷达研究中的重点。
针对激光雷达点云的分类问题,经过许多科研人员的长期研究下,已经有了相当多的有效的分类方法,已经能够运用在相当程度要求的工程或测绘实验当中。在最为早期激光雷达技术尚未成熟时,进行人工分类是当时最为主流的方法,其弊端也相当明显,耗时长、处理慢且仅可用于数据较少的情况,对于大量数据的处理和复杂地物的分类的效果也不甚理想。在激光雷达技术不断发展后,点云数据的分类技术也有了长足的进步,并以滤波法分类为主,但大部分滤波法只能运用于较为平缓的地势区域,在地势陡峭起伏不定的区域分类效果欠佳。在高植被覆盖的复杂山区,渐进加密三角网 [2] 滤波是较为有效方法,可以实现高坡度区域的地面点分离。通过分类后的地面点则可用于生成一系列数字地形模型,可用于实验或工程当中。
2. 研究区域概况
研究区域位于重庆市奉节县竹园镇百步村附近(图1),主要以侵蚀、剥蚀的中低山斜坡地形为主,地形总体北西高南东低,紧邻斜坡顶部有陡崖分布,斜坡坡面主要为乔、灌木草丛,植被相对较发育。场区高程在618~1082 m之间,相对高差302 m,最低点位于南侧斜坡底部,最高点位于调查区北部斜坡顶部。从纵向上看斜坡坡角陡、缓不一,坡体地形呈阶形,从横向上看斜坡表面凹凸起伏状。在调查区多数地段地形较平缓,地形坡角一般为2˚~38˚ [3]。实验使用飞行平台为防水型六轴无人机(2镜头摇摆倾斜摄影系统)和索尼航摄仪(DSC-RX1RM2)倾斜影像数据采集。测区范围内合理布置像片控制点数量及位置,利用RTK采集高精度像片控制点,并根据其规模特征,航飞面积1.2平方公里,飞行高度设定坡顶为300 m,航向重叠率80%,共计获得点云数据427,527,703个(图2)。
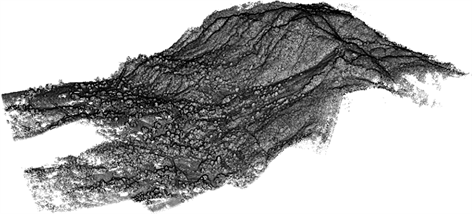
Figure 2. LiDAR data in the research area
图2. 研究区LiDAR数据
3. 技术与方法
3.1. 点云预处理
受到设备本身精度、人为操作或者物体表面材质等因素的影响,或是采集数据的过程中受到飞行物的影响,都会使数据产生相当程度的噪点,从而影响数据的精度。常见的噪声包括高位粗差和低位粗差,高位粗差通常是由于激光雷达在采集数据的过程中采集到低空飞行物所反射的信号,所以显示在所采集数据的上方。而低位粗差则是由于测量过程中的多路径误差或者激光测距仪的误差导致产生的极低点。
对于噪点的处理,通过K-近邻搜索建立散乱点云之间的拓扑关系 [4],进而采用高斯影响函数作为核函数来估计当前测点对周围邻近点的影响力,从而限制噪声并剔除离群点。噪点一般呈现为无序且无规律,选择建立数据点之间的空间拓扑关系 [5] 进而搜索每个点的K-近邻。目前常见的K-近邻计算方法有空间单元格法、八叉树法和K-d树法。其中,前两种方法都是基于包围盒的划分,后一种方法通常用来查找距离最近的两点。实验中选择的是空间单元格法。通过反复操作以及人机交互可以达到更好的去噪效果。
在研究区的原始LiDAR数据中,存在明显偏离地面,在整体数据上方的离散点,在经过一次去噪后可发现去噪效果明显,图内已无明显离散点,图3为一处噪点密度较高截面去噪前后对比。
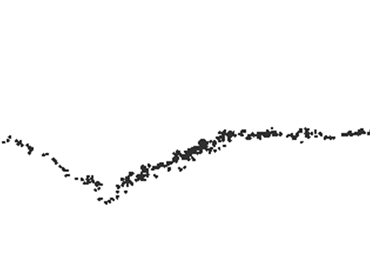 (a) 去噪前
(a) 去噪前  (b) 去噪后
(b) 去噪后
Figure 3. Contrast before and after denoising
图3. 去噪前后对比
3.2. 点云数据分类
机载激光LiDAR早在多年前便已经运用在森林和植被覆盖的区域,使用自动化的算法进行地面点与植被等地物分类是处理原始激光雷达数据必不可少的步骤。现有的大多数滤波算法仍只适用于地形平坦,地形起伏较为连续的区域,在地形的崎岖、植被覆盖广、地形不够连续的地区 [6] [7]。因此我们实验需要选择一种适用的滤波算法进行点云数据的地面与地物分类。
实验使用的地面点与地物分类的算法为一种渐进加密三角网滤波算法 [8],该算法可以处理多种林地覆盖地区,特别是地形和环境较为复杂的区域。此算法通过种子点生成一个稀疏的三角网,然后通过迭代处理逐层加密直至将所有地面点分类完毕。基本步骤为选取局部窗口内的最低点作为初始地面种子点,以此构建不规则三角网,然后计算剩余点到相应三角形的距离和角度,与设定的阈值比较,迭代加密三角网 [9] 得到最终的地面点。
在实验中我们设置不同的坡度阈值,观察在不同情况下的地面点分类情况。实验选择一处坡度较为陡峭且有明显变化的区域作为观察区域,观察在不同坡度阈值分类后的地面点分类情况。在坡度阈值为50,仅能提取出底部坡度较低区域地面点,点位连续效果较好。当阈值设置为80时可识别完整地面点,分类情况较好且点位连续,坡度明显变化区域地面点分类成功(图4)。将阈值80所分类地面点与原始数据对比观察,地面点分类准确无明显跳跃点和错误分类点 [10]。
在坡度阈值的选择上,应根据当前数据条件选择不同的阈值,在起伏较大区域选择较大的坡度阈值,在地势平缓区域应选择较小阈值避免分类错误。
3.3. 数字高程模型
分类后的地面点可用于处理制作多种数字地形图像,本实验选择制作最常见的数字高程模型(DEM),我们使用2 m × 2 m的栅格大小,使用IDW (反距离权重)插值法进行DEM的制作(图5)。IDW插值是通过对已知采样点赋权得到未知点的值,由未知采样点和已知采样点间的距离远近来决定权重,IDW对邻近区域离散点群的平均值运算来获得内插单元,是一种逐点内插方法,其基本思想是当预测一个点的值时,接近预测点的值对预测点的影响更大,相反影响越小,即周围点对预测给出的权重与预测点的距离成反比。反距离加权插值作为一种简单有效的数据插值方法,其运算速度相对较快。
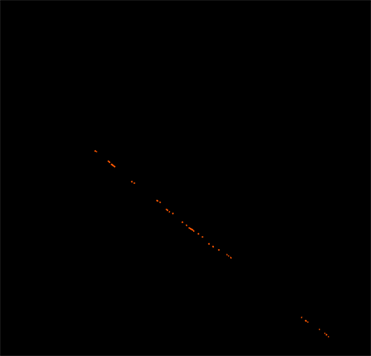 (a) 原始LiDAR数据
(a) 原始LiDAR数据 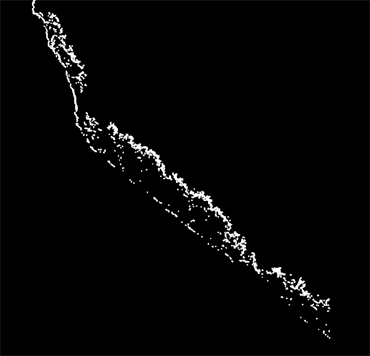 (b) 坡度阈值50
(b) 坡度阈值50  (c) 坡度阈值80
(c) 坡度阈值80  (d) 提取地面点与原数据
(d) 提取地面点与原数据
Figure 4. Classification and comparison of point cloud data at different slope thresholds
图4. 不同坡度阈值点云数据分类对比
4. 结束语
本实验尝试了在高植被覆盖的山地区域,使用机载激光LiDAR进行数据的采集、预处理、数据分类并生成数字高程模型一整套完整的操作。实验选择了适用于该区域的算法和理论,在就特殊地形情况下的激光雷达技术的实用性进行了分析。可知在现有技术与理论条件的基础上,LiDAR技术已经能够满足一定程度的工程项目或地质灾害识别应用。
基金项目
重庆市科学技术局科研机构绩效激励引导专项:基于机载激光雷达的高陡危岩体调查、特征识别与监测技术及其应用研究(项目编号:cstc2018jxjlx0001)。