1. 引言
如今,在轻工业以及医药业等新兴行业中,企业的生存发展和生产效率的高低息息相关,因此大量物品的分拣、分装费时越短越好。这类操作重复性强,劳动强度大,效率要求高,并且食品和药品的生产过程对卫生条件要求苛刻,因此需要开发一种可用于完成上述操作的自动化设备来代替常规的人工操作 [1] [2]。高速并联机器人凭借其高速度和高加速度等特点在这些行业中得到了广泛的应用,高速并联机器人的引入很好地克服了由人工完成分拣、装箱等大量简单重复性工作时存在的易污染、效率低、成本高等缺点 [3] [4]。
考虑到规模效益对生产率,卫生条件对生产环境以及品种多样性对生产柔性的要求,国外的以上领域中正在越来越多的应用高速机器人来完成抓放任务,例如,美国Adept Technology公司生产的Cobra系列SCARA机器人 [5],ABB公司生产的IRB 340 Flex Picker机器人,德国Bosch SIGPack Systems公司生产的X系列机器人等已在北美和欧洲开始用于食品、日用化妆品及瓶(袋)装药品的包装 [6] [7]。目前,在我国多数企业的生产制造环节中,仍然是采用传统费时费力的人工操作方式,并且精度和生产效率也较低。因此,开发和研究应用于该类生产线的高速机器人装备具有重要的现实意义 [8]。
本文主要研究一种四自由度高速搬运并联机器人机构,用SolidWorks软件完成对并联机器人机构的机械结构设计和建模,再建立四自由度高速并联机器人机构的位置闭环方程 [9]。通过计算分析得到其位置逆解,利用有限元软件ANSYS完成在典型位型下四自由度并联机器人机构的模态分析,最后利用数值分析和逆解模型对机构的工作空间求解,同时利用MATLAB编程得到机构可达工作空间。
2. 整体机械结构设计
本文所研究的并联机器人属于高速抓放机械手的一种,根据工作状态的不同,可以进行抓取和放下两种动作,因此机构主体部分需要能够实现空间内三个方向的平动和一个方向的转动。其中,三方向的平动用于实现抓放目标物品的空间移位,而调整目标物品的摆放姿态则要依靠转动,最终才能实现移位和摆放在同一道工序内完成。机构的整体结构如下图1所示 [9]。
该机械手结构拥有以下优点:1) 整体采用并联机械结构,所有驱动器均安装于机架上,既可以减低构件惯性,又能提高机构承载强度,并且更有利于机构的组装和模块化。2) 创新地采用了对称的四导轨机架结构,可以有效地减轻高速运作时机械结构中铰链和螺母的摩擦,提高了动平台的刚度,延长了机构的使用寿命。3) 动平台的设计分开为主、副平台俩部分,通过齿轮齿条结构将支链末端的主平台和副平台在竖直方向内的相对移动转化为末端执行器在正负180˚范围内的转动 [10] [11]。
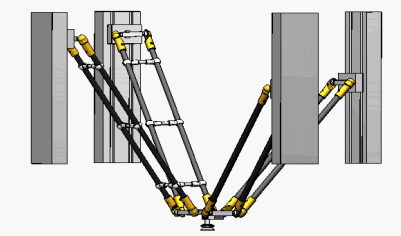
Figure 1. Mechanical overall structure diagram
图1. 机械整体结构简图
3. 运动学建模
本文所研究的是一种三平动一转动的四自由度高速并联机械手,该机构主要的结构包括:静平台、动平台以及四条连接静、动平台的支链。
3.1. 系统简介与坐标系建立
如图2所示,三平一转的四自由度机高速并联械手机构的主要结构有:静平台、动平台以及四条连接静、动平台的支链。
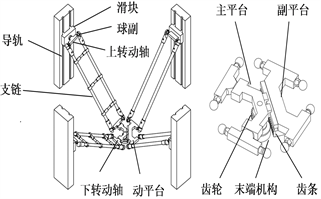
Figure 2. Three dimensional modeling of mechanism
图2. 机构三维造型
其中第一条支链和第二条支链的结构完全一样,由滑块、上转动轴、平行且等长的两个从动臂和下转动轴构成,其中滑块与固定板以移动副的形式相连接,上转动轴与滑块以转动副的形式相连接,从动臂的上端通过两个对称的球副与上转动轴相连接,而下端通过两个对称的球副与下转动轴相连接,下连接轴与动平台以转动副的形式相连接 [12]。需要指出的是,平行且等长的两个从动臂之间固接有支撑杆,故该支链的连接方式可视为PRRRR结构,将前两个R副和后两个R副分别组合,可视为PUU结构,其中P为移动副,R为转动副、U为虎克铰。第三支链和第四条支链的结构完全相同,由滑块和两个平行且等长的从动臂构成,其中滑块与静平台以移动副的形式相连接,从动臂的上端通过两个球副与滑块相连接,下端通过两个球副与动平台相连接,其连接方式可视为P(SS)2结构,其中S为球副 [13]。
此外,动平台包含主平台和副平台,且主平台和副平台通过移动副连接,并采用直线导轨副导向。在主平台上设置有齿轮,在齿轮的下端设置有末端执行器,在副平台上设置有齿条,齿轮和齿条相互啮合传动,因此在主平台和副平台做相对移动时,通过齿轮齿条机构的传动,下方的末端执行器便可获得转动自由度。
图3示出了四自由度机械手的结构简图,图中
为静平台上的定点,
为支链i与动平台连接的铰链中心,Bi为连接滑块(或上下转轴)和从动臂的铰链中心。在A1A2A3A4和C1C2C3C4上分别建立固定参考系
和
连体系,且满足原点O为
与
的交点上,x与
重合,y与
重合,原点
在为C1和C2所在点的末端转轴延长线的交点,x与x平行,y与y平行,则
设置在了主平台上。设
为
对应且设置在副平台上的点,且当机构处于初始位型时,
与
重合。
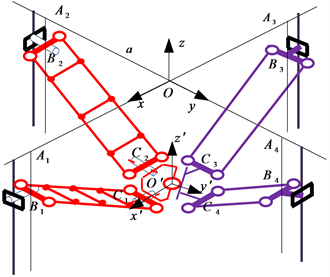
Figure 3. Schematic diagram of mechanism
图3. 机构原理简图
3.2. 位置逆解模型
本文建立的位置逆解模型主要是为了求解机构下方动平台的空间位置与机构驱动杆长之间的关系 [14]。位置逆解的主要作用是为后续机械结构设计和机构模态分析奠定理论基础。
2PUU-2P(SS)2并联机构的位置逆解分析可归结为已知尺度参数和末端点
的位矢及主副平台之间的距离d,求解驱动杆长qi [15]。
参见图3,末端参考点
在系
中的位置矢量
可表示为:
,
,
(1)
式中,
表示第i条支链从动臂的杆长,
表示它的单位方向矢量,
和
分别为由点O到
和
到
的位置矢量,
为主副平台移动副方向的单位方向矢量,且有
,可得:
(2)
3.3. 算例
根据所给CAD三维模型,可以量出以下数据:
,
,
,
选取任意两个不同位形1和2,如表1所示,令位形1:
,
,位形2:
,
。代入(2)式可得q的值,由以上的推导过程可以得出不同位形下的模型位置。

Table 1. The position and length of the mechanism
表1. 机构的位置及杆长
图4和图5为机构在SolidWorks软中对应的位形,对比可知,逆解模型正确。
3.4. 模态分析
研究系统结构动力学特性的一种重要办法就是模态分析。并且这种研究方法在机械学的振动领域也有广泛的运用。获得模态参数的方法主要有计算模态分析和试验模态分析两种方法。
文主要采用计算模态分析的方法,研究机构各零部件振动特性的固有频率和模态振型 [16]。动平台的工作空间如上图6所示,选取其中三个典型的位置(图中a,b,c)分析。
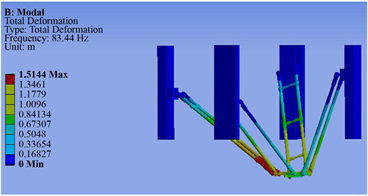
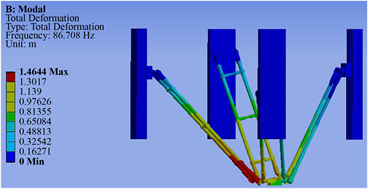
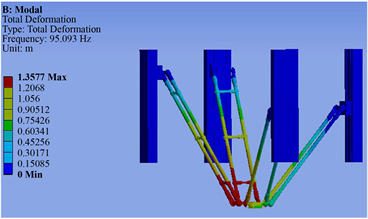
模态分析前需要先为零部件选择合适的材料,修改好其间的接触关系。动平台的末端执行器不必添加载荷,只需将四个固定板作为约束面。运用ANSYS workbench对动平台位于工作空间的典型位置进行模态分析,前四阶固有频率如下表2所示。其对应的模态振型图如下图7~图9所示。
认真分析表2和图7,可以发现:2PUU-2P(SS)2并联机构前四阶固有频率比较高,并且具有良好的动态特性。第一阶振型为沿x轴移动,第二阶振型为沿y轴移动,第三阶振型为沿x、y轴反向运动,第四阶振型为沿x、y轴同向运动,通过ANSYS软件对典型位置进行模态分析可以准确地得到振型,当有外部激励应该避开机构的前几阶固有频率,才能避免共振现象发生。
4. 并联机构工作空间分析
工作空间对于机构来说是至关重要的,它反映了机构运动的性能所以研究机构的工作空间是研究机构必不可免的环节。在现有的研究方法中,主要是利用数值分析、画图法和解析法三种 [17]。本文中采用
Table 2. First six natural frequencies of 4-DOF high speed parallel robot
表2. 由度高速并联机器人前四阶固有频率
 a处一阶振型
a处一阶振型 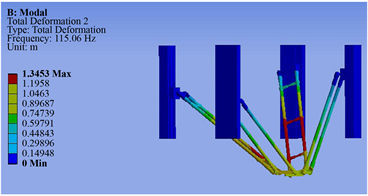 a处二阶振型
a处二阶振型 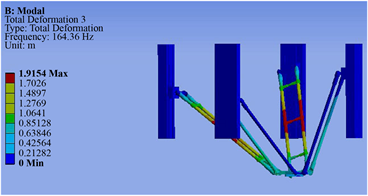 a处三阶振型
a处三阶振型 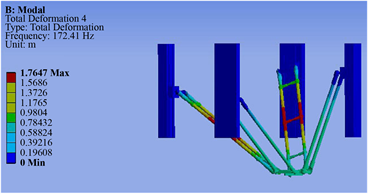 a处四阶振型
a处四阶振型
Figure 7. The fourth mode shape of point a
图7. a点位置前四阶模态振型
 b处一阶振型
b处一阶振型 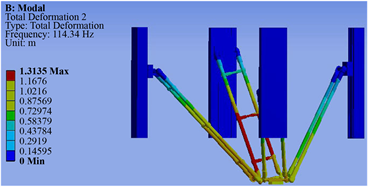 b处二阶振型
b处二阶振型 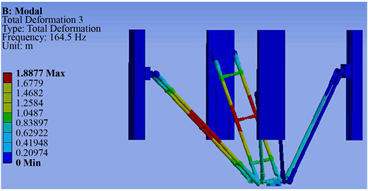 b处三阶振型
b处三阶振型 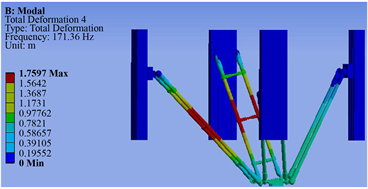 b处四阶振型
b处四阶振型
Figure 8. The fourth mode shape of point b
图8. b点位置前四阶模态振型
 c处一阶振型
c处一阶振型 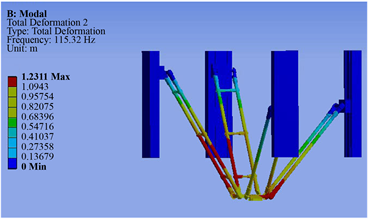 c处二阶振型
c处二阶振型  c处三阶振型
c处三阶振型 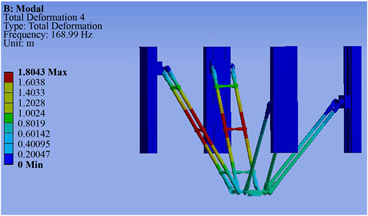 c处四阶振型
c处四阶振型
Figure 9. The fourth mode shape of point c
图9. c点位置前四阶模态振型
的是数值分析,机构的结构参数:
,
,
,
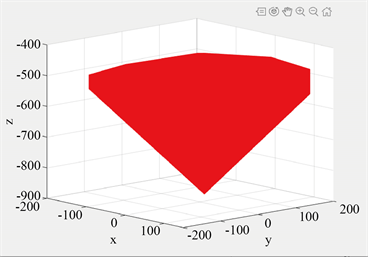
,并以四个固定板长度为550 mm为约束条件计,同时给机构添加驱动马达,采用数值搜索,将对所有位置导入MATLAB,利用MATLAB编程可得到机构的工作空间,得到工作空间如图10。
 (a) X-Y-Z三维图
(a) X-Y-Z三维图  (b) X-Y方向投影
(b) X-Y方向投影  (c) X-Z方向投影
(c) X-Z方向投影 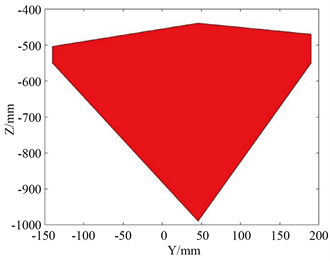 (d) Y-Z方向投影
(d) Y-Z方向投影
Figure 10. Reachable workspace of parallel robot
图10. 并联机器人可达工作空间
从图10中可以看出,并联机器人可达到工作空间并没有出现空洞的情况说明了其运动性能良好。
5. 结论
用SolidWorks软件完成对并联机器人机构的机械结构设计和建模,并通过运动学分析和逆位置求解,用算例对逆解模型验证结果表明模型的准确性。将实体导入ANSYS workbench之后对对并联年机器人机构进行模态分析,得到了其前四阶固有频率和对应的振型,通过分析机构的薄弱环节可以为后续的结构设计参数优化提供参考,也可以为并联机器人的动力学性能打下基础。从分析前四阶三个经典位置的固有频率达到了设计的要求,具有良好的动态特性。同时通过数值分析和MATLAB编程得到了机构的运动空间范围表明了机构运动性能的良好。
参考文献