1. 引言
随着微控制技术的不断发展,无人机技术逐渐兴起。无人机又称空中机器人,是由遥控站管理的航空器,可以脱离人的控制,自主完成飞行任务。近年来无人机技术迅速发展,在各个领域都有应用。在军用领域,无人机主要用于低空侦查,电子干扰等作战任务。可以减少人员伤亡,提高作战效率。在民用领域,无人机可以用于通讯中继、环境研究、防汛抗旱监测等领域 [1] 。无人机还可以用于农业勘探、边境巡逻等方面,具有广阔的市场应用前景。
飞行控制系统是现代无人机的核心,对于无人机来说不可或缺,其能使无人机不需要人的干预自主平稳飞行。无人机的快速发展对飞行控制系统提出了更高的要求。随着现代控制理论和技术发展,以及集成电路、嵌入式微处理器和微机电技术的成功应用,无人机在软件与硬件等方面都取得了长足的进步。由于无人机作为一个复杂的现代控制系统,涵盖了通讯、电子、控制、信号处理等各方面专业技术,这些都对无人机的飞控提出了更高的要求。
目前市场上主要流行是以旋翼无人机、固定翼无人机为研究对象的飞控系统,而将两者相结合的复合式无人机飞控系统正在快速发展阶段。由于其兼具两者优势,具有重要的研究价值 [2] 。复合式无人机由于结构复杂,对飞控系统的要求则更高。本文针对复合式无人机的特点,以目前开源的APM、PixHawk等飞控为基础,设计针对于复合式无人机的飞控电路图,制作飞控板并同时编写复合式无人机飞控软件。
2. 复合式无人机简介
复合式VTOL无人机是旋翼无人机与固定翼无人机相结合的产物,如图1所示。旋翼无人机配有单个或多个朝正上方的螺旋桨,由螺旋桨的动力系统产生向下的气流,并对飞行器产生升力,在一定速度范围内可以任意的速度飞行,但其飞行速度有限,飞行航程一般较短。它的特点是可以垂直起降,对场地要求低。固定翼飞行器靠螺旋桨或者涡轮发动机产生的推力作为飞机向前飞行的动力,主要的升力来自机翼与空气的相对运动。所以固定翼飞机必须要有一定的无空气的相对速度才会有升力来飞行。因为这个原理,固定翼飞行器具有飞行速度快,比较经济,运载能力大的特点,但是其不足之处在于悬停较为困难。
复合式无人机兼具两者的优点,既能以固定翼无人机的方式滑行,提高航程,又可以以旋翼无人机的方式垂直起降,自由悬停。复合式VTOL无人机的组成主要有机体结构,动力装置,飞行控制系统三部分组成 [3] 。

Figure 1. The Pterosaurs A7 hybrid drone
图1. 翼龙A7复合式无人机
3. 复合式无人机工作原理
3.1. 机体结构
3.1.1. 机身
复合式无人机机身为飞机的主体,用于连接飞机的其他部分,包括机翼,尾翼,起落架,机臂等部分。机身内部一般有用于放置控制系统与动力系统的机舱。制作材料目前多用碳纤维材料,让飞机整体达到轻量化 [4] 。
3.1.2. 机翼
机翼是飞机产生升力的部件,机翼后缘有可操纵的活动面,靠外侧的叫做副翼,其内部均安装有舵机,用于控制飞机的飞行姿态。靠内侧的则是襟翼,用于增加起飞着陆阶段的升力。机翼与尾翼配合形成良好的操作性与稳定性。
3.1.3. 尾翼
尾翼主要提供稳定性和俯冲、偏航控制,同时它还有配平的作用。水平尾翼由固定的水平安定面和安装在后部的升降舵组成。升降舵是水平尾翼中可操纵的翼面部分,其作用是对飞机进行俯仰操纵。
3.1.4. 起落架
起落架是用来支撑无人机停放、滑行、起飞和着陆滑跑的部件。一般由支柱、缓冲器、刹车装置、机轮和收放机构组成。
3.1.5. 机臂
机臂主要是旋翼飞机所具有的结构,通常有四旋翼,六旋翼,八旋翼等,根据负载的需求各有不同。复合式无人机的机臂一般安装在机身两侧,用于固定电机。
3.2. 动力系统
复合式无人机的动力系统结构比较复杂,主要包括:动力电池、舵机、电机、螺旋桨、电子调速器等。因为其结合了多旋翼无人机与固定翼无人机的双重特点,所以动力系统需要各部分相互配合,如图2所示。控制系统为动力系统的指挥核心,其发出的控制信号。电子调速器是连接控制系统与电机的桥梁,动力电源提供动力。无人机两侧各有两个动力电机和一个舵机,尾部有两个舵机和一个推力电机。
3.2.1. 动力电池
所谓聚合物锂电池是指运用了聚合物作为电解质的锂离子电池。此电池在电压、容量和放电能力上都表现优异。其结构简单、重量轻、使用方便,可根据实践需求,添加或削减电芯厚度,充分利用内部空间。
3.2.2. 螺旋桨
螺旋桨是产生力的器件,会对无人机功率产生重要影响,进而影响无人机飞行。螺旋桨需要电机、电调、螺旋桨需相互匹配使用,才能发挥最大效率。
3.2.3. 电机
无人机主要以无刷电机为主,用于带动螺旋桨旋转,产生拉力或推力。螺旋桨越大,较大的转动力和较小的转速即可提供足够大的力。
3.2.4. 电调
电调全称电子调速器,针对不同的动力电机,可分为有刷电调和无刷电调,它根据控制信号调节电动机转速。因此,电调是给电机供电、控制电机转速的电子调速器,是飞控连接电机的桥梁。
3.3. 飞行控制系统
复合式VTOL无人机的飞行控制系统是无人机最核心的部分,主要包括:主控制芯片,气压计、加速度计、陀螺仪、磁力计、GPS、数传电台、PWM信号输入输出、接收机、发射机等。本文设计的整体飞控设计框图如图3所示。
3.3.1. 主控芯片
本文采用STM32F407VET6芯片作为主控芯片。主控芯片主要用于无人机的各种数据处理,姿态解算,位置控制。此芯片内核采用ARM结构32位Cortex-M4内核,采用1.8~3.6 V直流电压供电,支持SWD和JTAG两种程序下载模式。
3.3.2. 气压计
气压计通过读取当前的大气压值和温度值,解算出当前相对于海平面的高度值。本文采用的气压计芯片是MS5611芯片,通过测量气压确定无人机高度,其分辨率可达10cm,工作温度范围:−40℃~85℃,供电电源:1.8 V~3.6 V。
3.3.3. 陀螺仪
陀螺仪是用于感受无人机各个方向角度的传感器,本文采用MPU6500芯片为6轴加速度陀螺仪传感器芯片,与HMC5883L芯片配合用于姿态结算,计算当前姿态角,采用SPI通讯协议,内置16位AD转换器,16位数据输出。本文采用双陀螺仪设计,通过两个陀螺仪的数据对比,增加系统的稳定性。
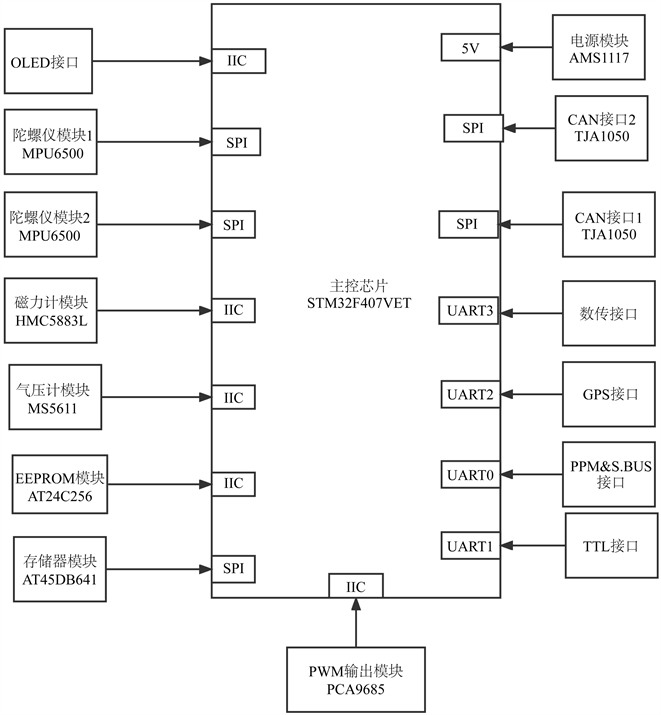
Figure 3. Flight control system framework diagram
图3. 飞控系统框架图
3.3.4. 磁力计
磁力计用于测量磁场方向和磁场强度的传感器,在惯性测量模块中,起到确定机体偏航角的作用。本文采用HMC5883L芯片,用来测量无人机方位角,与MPU6500模块配合用于姿态结算,采用3~5 V电压供电。采用IIC通讯协议。
3.3.5. 存储器
本文采用AT24C256芯片作为EEPROM存储芯片,存储飞控系统中的一些静态数据,传感器的矫正值,PID矫正值,航点位置信息等,这些数据传输给主控芯片,主控芯片通过计算控住无人机的性能,其采用IIC通讯协议,3.3 V供电。
3.3.6. PWM波输出
本文采用PCA9685芯片用于输出PWM波,采用IIC通讯协议。PWM信号进入电调系统,对电调的输出量进行调节,电调连接无刷电机,从而控制电机的转速。
3.3.7. 数传电台
本文采用74LVC2G240芯片用于接收遥控器无线电信号,并产生PPM信号。PPM信号是将多个控制通道集中放在一起调制的信号。这些信号作用于电调系统,控制无刷电机。这样就实现了一个遥控器上可以同时对对个电机进行控制。此芯片也兼容SBUS协议。通过串口与主控芯片相连接。供电电压为1.65 V~5.5 V。
3.3.8. 屏幕显示
本文加入OLED芯片,此模块用于显示飞控控制系统相关状态信息。本飞控采用0.96寸OLED显示屏,具有可视角大,耗电量低,对比度高等特点。采用IIC协议与主控芯片链接。
3.3.9. 日志存储
本文采用AT45DB161芯片为大容量存储芯片,用于存储飞行日志相关数据。采用SPI通讯协议。存储容量为16MB,组织为4096页,每页有512字节。
本文飞控三维PCB图如图4所示。
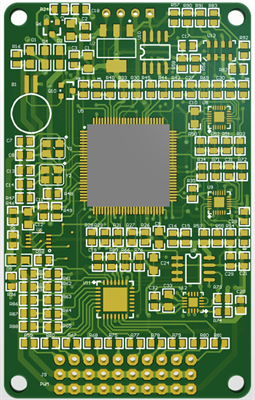
Figure 4. Flight control 3D PCB diagram
图4. 飞控三维PCB图
4. 飞行控制系统
飞行控制系统是飞控系统的核心部分,不同的算法对无人机的飞行影响很大。复合式无人机的控制系统主要任务是对无人机进行姿态控制与位置控制 [5] 。
4.1. 姿态控制
复合式无人机的飞行姿主要通过三个传感器采集,分别是加速度计、陀螺仪、磁力计传,通过姿态解算算法解算当前的飞行姿态 [6] 。无人机的姿态主要有三个角度组成,分别是俯仰角,滚转角,偏转角。在无人机系统中,测量单元对角速度的感知要比角度更加灵敏,因此在串级反馈控制中,将角速度控制作为内环,将角度控制作为外环,组成一个双环串级反馈控制系统。整个姿态控制流程如下图5所示。
4.2. 位置控制
位置控制与姿态控制对于无人机同样重要,这也是无人机全自动飞行的基础 [7] 。为了确定无人机的位置,无人机飞行位置主要通过两个传感器采集,分别是GPS与气压计。当前的空间位置信息与地面站输入的航点位置信息做对比,用于位置控制,经过混控算法计算输出PWM信号,最后通过控制电机转速或舵机偏转角度,控制复合式VTOL无人机的飞行位置。由于无人机测量系统对速度较位置更为敏感,因此位置控制也采用了双环反馈控制方法。其内环为速度控制环,外环为位置控制环,整个位置控制流程如下图6所示。
4.3. 软件系统
控制系统软件代码编写,采用C语言为主,对各个传感器的驱动进行封装。软件调试在Windows7系统下,使用Keil uVision5调试系统。创建工程后,选择STM32F407VET6芯片,配置相关设置。编写代码后编译应用程序,生成“.hex文件”,通过ST-Link下载器把该文件下载到飞控中。飞控部分代码展示如下图7所示:
5. 实验结果
5.1. 飞控实物图展示
如下图8所示,为飞控板实际运行效果。
5.2. 传感器数据的读取
如下图9~11如所示,分别为气压计数据读取,陀螺仪数据读取,磁力计数据读取。
6. 结束语
本文以复合式无人机飞行控制系统为研究对象,以目前开源的APM、PixHawk等飞控为基础,针对复合式无人机的特点对飞控的硬件与软件进行设计。使用了STM32芯片作为主控芯片,加入双陀螺仪设计,并把PCA9685芯片引入飞控系统,提高了飞控的性能,并增加了显示等模块,使飞控的数据交互更为直观。在软件方面,摒弃了许多飞控常用的LUNIX开发环境,使用MDK开发环境,对各个模块底层驱动进行设计,源码思路清晰,整个飞控具有很大的实用性与经济价值。
参考文献