1. 引言
二氧化碳驱采法作为近年来有效提高低渗及超低渗油藏采收率的采油技术,但却面临着注采管腐蚀损坏的风险,而且常规腐蚀检测装置在地下复杂环境中难以起到预防警示的作用。因此,需要建立精准可靠的井筒注采管内腐蚀预测模型,对制定注采井长期安全运行对策具有重要意义 [1] [2] [3] 。
在注采管腐蚀预测方面,已有不少的预测模型,主要分为三类:经验模型、机理模型和机器学习模型。李碧曦 [4] 等根据注采管内压力、温度耦合关系,构建了Norsork模型预测CO2腐蚀速率,预测结果与实际值误差较小,但是这种模型只考虑了压力和温度两种因素。NESIC [5] 等通过研究金属表面发生的电化学反应建立了预测腐蚀速率的机理模型,但由于未充分考虑腐蚀产物膜的影响造成预测结果往往大于实际结果。骆正山 [6] 等构建了KPCA-IGWO-ELM腐蚀速率预测模型,对于盐穴储气库注采管腐蚀速率预测具有较高的精度,但其腐蚀预测指标体系不具有普适性。
综合上述理论研究的基础,由于目前的诸多神经网络算法存在特征因素考虑不全、结构冗余、精度不高的缺陷,因此,现针对CO2驱环境下注采管柱内腐蚀构建ECOSSA-AMLP预测模型,通过注意力机制实现对井下复杂环境中腐蚀因素重要性的分析,针对目前SSA存在搜索能力不足进行改进,充分发挥MLP的拟合优势。最后将模型应用于工程实践,检验其效果。
2 基础模型
2.1. 多层感知机模型
多层感知器模型。也被称作多层前馈神经网络,是人工神经网络模型中一种经典模型,用输入层、隐含层、输出层的组织结构描述变量间复杂映射关系 [7] [8] 。
如图1所示,xi为输入神经元的给定i个特征值样本,传入隐藏层进行信息加权wi加工,最后经过激活函数由输出层输出结果y。其中:
(1)
式中,b为偏移量。再经过激活函数处理得到y。
(2)
2.2. 注意力机制
在原始注采管腐蚀数据中存在着大量冗余信息,运用注意力机制可以有效提取重要信息。注意力机制是根据人脑会首先处理自己所认为最重要的信息这一特点所构建的,其核心在于从先验信息中提取各个特征间的联系,并按其紧密程度分配权重,后期由权重决定对信息进行加工的程度。其公式如下:
(3)
式中,Source为信息源,Query为先验信息,Value为值,similarity (Query, Keyi)表示Query查询元素和Keyi序列元素地址的相关度。将原始注采管腐蚀数据作为信息源传入,通过注意力机制提取数据中包含的大量信息:各个特征因素之间的关系以及特征因素与腐蚀速率的关系,按照相关度进行权重赋值,最后进行归一化处理得到Attention注意力值,作为多层感知机的初始权重wi将输入传递到隐含层进行训练。
2.3. 樽海鞘群算法
樽海鞘群算法 [9] 区别于其他智能算法的是,樽海鞘群以头尾相接组成的“链”的形状进行觅食,而不是“群”的形式,领导者在头部进行搜寻,追随者根据领导者或前位追随者位置进行更新,这就使得这种算法具有更强的传递性和多样性,具体算法如下。
樽海鞘群初始种群随机散布在搜索空间,计算出所有个体的适应度值,根据适应度值,从最优到最差依次为食物源位置、领导者位置和追随者位置,在迭代过程中分别进行位置更新。领导者位置更新公式描述如下:
(4)
(5)
式中:
为第t + 1代樽海鞘群领导者位置的第i维;F(t)为第t代时食物源位置;c1为收敛因子,控制迭代过程的搜索能力;tmax为最大迭代次数;c2、c3为[0, 1]之间的随机数,c2为樽海鞘群领导者移动步长,控制收敛速度,c3决定樽海鞘群移动方向。
追随者根据链式规则,顺次跟随移动,其数学模型描述如下:
(6)
在对所有个体进行位置更新后,会进行边界处理,超出边界的个体会在搜索空间中随机生成,位置更新如下:
(7)
式中,r为[0, 1]的随机数。
3. 樽海鞘群优化算法模型改进
3.1. 改进Tent映射的种群初始化
在以往研究中发现,种群初始化分布不均匀将导致种群陷入局部最优解,致使迭代提前结束 [10] 。因此,引入Tent映射对种群进行初始化,在搜索空间中形成随机均匀分布的遍历种群,提高樽海鞘群的多样性,进而提升SSA算法的收敛速度和寻优精度。通过Tent映射在[0, 1]区间产生混沌序列,樽海鞘群个体将在混沌序列空间中进行勘探和开发。为了完善这一算法,在原有的Tent混沌映射中加入一个随机变量r/N,可以再生成运算效率更高的初始化种群同时,克服原本Tent映射的周期短且不稳定的缺陷,改进后的Tent映射的种群初始化如下:
(8)
式中,
为第i个樽海鞘个体在j维的位置,r为[0, 1]之间的随机数;
是混沌参数,
越大,混沌性越好;N表示种群规模。
设置粒子数量为70,改进前后粒子初始化结果如图2、图3。
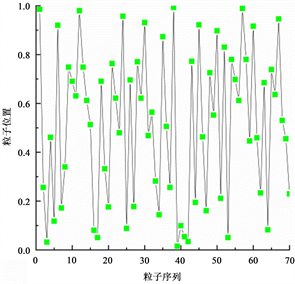
Figure 2. Improve the preparticle initialization
图2. 改进前粒子初始化情况图

Figure 3. Imfied particle initialization case
图3. 改进后粒子初始化情况
3.2. 精英质心遗传策略
传统樽海鞘群中追随者的位置更新只受上一代位置的牵引,当上一代陷入局部最优解的时候,无法跳出局部最优解,追随者也会陷入迭代停滞,最终影响算法的求解精度 [11] 。为了避免追随移动的盲目性,选出樽海鞘群中适应度值最优的精英个体并利用精英个体对樽海鞘群进行更新引导,可以将上一代的有效信息并传递至下一代,以此加快寻优速度,同时增强追随者的搜索能力,精英质心的定义如下:
(9)
式中
是从樽海鞘群体中按适应度值排序最优的p个个体作为精英个体;Mj为第j维空间中精英质心的位置。
因此,樽海鞘群中的领导者不仅受到食物源的牵引,还能充分利用精英个体的信息,改进后领导者的位置更新如下:
(10)
3.3. 反向学习策略
为了充分利用精英质心的有效信息,通过透镜折射反向学习生成精英质心的反向解空间,将原本樽海鞘群领导者的搜索空间从单一的食物源扩大至反向解空间,扩展樽海鞘群体活动范围,提高获得最优解的概率。生成的精英个体的反向解空间如下:
(11)
式中:k为(0, 1)的随机数;Mij为第j维空间中第i个精英质心的位置;aj(t)、bj(t)为当前精英中的最优解和最差解;xij(t)为第t代的当前解;
为第t代反向解。樽海鞘领导者在当前解空间和反向解空间中同时进行搜索,选择两个空间中最优解作为下一代领导者的位置,这样算法更容易跳出局部最优解,提高算法的全局搜索性能。
改进后领导者位置更新公式如下:
(12)
式中:
为第t代领导者最终位置更新。
4. 模型构建
基于ECOSSA-AMLP的CO2驱注采管内腐蚀速率预测模型建模步骤如下:
步骤1 整理数据集,划分训练集和测试集
步骤2 归一化;
步骤3 注意力机制分配权值;
步骤4 初始参数设定:樽海鞘群种群规模N × D、最大迭代次数Tmax、种群位置的上限与下线uj和lj;
步骤5 定义适应度函数:适应度函数定义为预测值与真实值的均方差,并计算出每个个体的适应度,选择出当前适应度最佳的个体,将该个体的位置为当前最优位置;
步骤6 确定食物源、领导者、追随者位置;
步骤7 位置更新:每次迭代后,重新计算适应度并进行比较,找出并更新至最优位置,若满足终止条件,则输出最优个体位置,否则返回步骤6继续执行,直到得到最优值;
步骤8 将寻优得到的最优参数权值和阈值带入多层感知机,得到腐蚀速率预测模型的输出。
具体流程如下图4:
5. 实例分析
5.1. 数据来源
杏河油藏是三角洲前缘水下分流河道与河口坝作用沉淀而成,渗透率低且不均,原始地层压力为10.2 MPa,饱和压力6.85 MPa,属于低压油藏。地层水为CaCl2水型,矿化度81.91 g/L。通过二氧化碳驱注采井腐蚀挂片实验,得到165条样本数据,每个数据包含10个特征值:温度(F1)、pH值(F2)、碳酸氢根含量(F3)、钠离子含量(F4)、氯离子含量(F5)、硫酸根含量(F6)、碳酸根含量(F7)、镁离子含量(F8)、钙离子含量(F9)、材质(F10),样本数据的标的结果是腐蚀速率。部分数据的样式如表1所示。
5.2. 结果分析
以python软件为仿真实验平台,利用表1中165组二氧化碳驱注采井腐蚀样本数据按照10:1的比例划分训练集与测试集,训练基于ECOSSA-AMLP的评估模型,首次将注采管材质作为输入变量,使得预测更加全面精确,并将评估模型得到的输出结果与真实值进行对比,评估模型对训练样本具有良好的拟合效果。
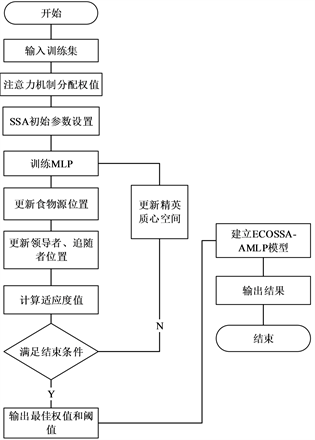
Figure 4. Flow chart of the ECOSSA-AMLP model
图4. ECOSSA-AMLP模型流程图

Table 1. Sample data of the wellbore part
表1. 井筒部分样本数据
经过多次训练测试,将种群数设置为30,ub = −0.01,lb = 0.01时,预测效果最好。由图5可知,改进后的种群在第51次就完成了迭代收敛,与未改进樽海鞘群预测模型相比,改进后的樽海鞘群优化算法可以加快迭代进程和寻优速度。
为了进一步对ECOSSA-AMLP模型的有效性进行验证,将输出结果反归一化,并选取MLP、基于SSA优化的AMLP与构建的ECOSSA-AMLP模型进行对比,利用表1中的测试数据对3种模型的预测效果进行对比,对比结果如图6所示,ECOSSA-AMLP的拟合效果最好,与真实值更接近。经过各种评价指标对比,如图7、图8、表2,MLP模型误差最大,虽然未改进的SSA-AMLP在个别样本点的预测误差小于ECOSSA-AMLP,但其波动较大,难以满足二氧化碳驱注采管腐蚀预测的要求。ECOSSA-AMLP模型平均误差降至0.0017,预测值与真实值误差降至0.0007,且较为稳定,鲁棒性优异。
6. 结论
针对井筒注采管腐蚀预测中样本数量少、实时监测难度大、发生事故后果严重等问题,提出一种基于ECOSSA-AMLP的新型腐蚀预测方法,通过建立造成腐蚀的特征因素与腐蚀速率之间的关系,实现注采管腐蚀的量化评估。得出主要结论如下:
Table 2. Comparison of the prediction model results
表2. 预测模型结果对比
1) 将注意力机制引入模型中,克服了传统神经网络中系统缺乏对输入特征的提取和强化致使计算效率低下的缺陷,使模型具有从大量信息中精准捕捉有效信息的能力,降低运算时间。
2) 引入Tent混沌映射、精英质心的概念对SSA进行改进,避免了原始算法陷入局部最优解的缺陷,提高算法全局开发性能及效率。
3) 构建ECOSSA-AMLP模型将评估的平均误差控制在2%以内,将均方根误差降低至0.078,证明了该预测模型可有效解决CO2驱注采管小子样腐蚀预测误差大的问题,为开展腐蚀风险评估提供了新思路,推进CO2驱采技术的工程应用。
NOTES
*通讯作者。