1. 引言
随着人们生活水平的提高,生活中自动化程度越来越高,全球用电量急剧上升;如何利用新能源发电解决能源危机和环境污染问题成为当下面临的挑战。中小型自主发电近几年得到政府有关政策的支持;[1] 有风无电的偏僻地带以及部分企业的自备电厂运用较广,尤其是在偏远山区、边防哨所、孤岛,大型农、牧、渔业以及油田等。直驱同步永磁风力发电机(D-PMSG)近年来受到重视,PMSG有控制精度好、效率高、维护少等诸多优点,因此在风力发电中应用较多,已逐渐成为市场主流风力发电机。
以往大多数研究人员采用Simulink等软件对风力发电机组的控制进行研究,但这些软件功能覆盖面广,含有器件较多,因而仿真速度慢,模型搭建复杂,设计周期长。本文采用专业的传动控制仿真软件PSIM,PSIM中含有SIMCAD模型搭建软件和SIMVIEW仿真分析软件。PSIM主要特点有用户界面简单,学习易懂、操作方便以及仿真速度快、仿真波形清晰直观等。另外,软件中元器件丰富,封装的风力机模块更是为本文D-PMSG的设计提供了优越的条件和基础。结果表明PSIM9.0仿真环境下可以快速直观的搭建本文要求的控制系统模型,实现发电机转速和并网电压的准确控制。
2. 永磁风力发电机组结构
直驱永磁风力发电系统主要由风力机、发电机、全功率变流器以及控制系统组成,图1为其结构图。D-PMSG去掉了沉重的齿轮箱,直接与风力机耦合,有效的提高了机组的可靠性和风能利用率。永磁体不需要外部励磁,因此和电网没有无功交换,并网侧为单位功率运行,全功率变流器能够实现低压穿越。总之,D-PMSG拥有如下一些特点[2] :1) 发电机体积小且发电机重量较轻;2) 电磁干扰小且电磁兼容性良好;3) 结构简单,可靠性好,使用寿命长;4) 效率高,节能效率明显;5) 恶劣环境下的适应能力强;6) 电压波形质量好,能适应各种负载变化。
3. 永磁同步风力发电机组数学模型
3.1. 风力机的功率特性
风力机的主要功能是将迎风能量截获并有效的转换为风力发电机的机械动能。
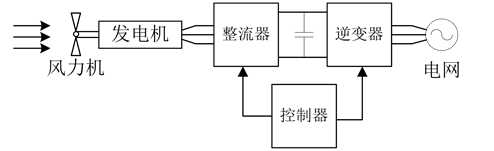
Figure 1. Structure of PMSG
图1. 直驱永磁同步风力发电机组结构
由空气动力学可知,气流扫过风轮机叶片时所捕获的风能即是风力机的输入功率,其表达式为:
 (1)
(1)
式中: 为截获空气质量;
为截获空气质量; 为风叶扫过面积;
为风叶扫过面积; 为风速;
为风速; 为空气密度。
为空气密度。
根据贝茨极限理论[3] ,风力机理论上能输出的最大功率为
 (2)
(2)
式中: 为风能最大转换系数,其值为0.593。
为风能最大转换系数,其值为0.593。
风力机输出转矩公式为
 (3)
(3)
式中: 为风力机输出功率;
为风力机输出功率; 为功率利用系数;
为功率利用系数; 为风轮旋转角速度。
为风轮旋转角速度。
3.2. 永磁同步发电机模型
PMSG在运行过程中,转子和定子始终保持相对运动状态,绕组与绕组,永磁体与绕组之间互相影响,再加上磁路饱和等非线性因素,电磁关系十分复杂,要建立永磁发电机的精确数学模型相当困难。因此,为了分析方便,通常作如下假设[4] :1) 定子绕组为Y型连接;2) 反电动势为正弦,不考虑空间谐波和磁路饱和的影响;3) 不计涡流和磁滞损耗;4) 励磁电流无动态响应过程。
PMSG的电压和电磁转矩在d-q轴旋转坐标系下的数学关系式如下所示
电压方程:
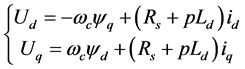 (4)
(4)
磁链方程:
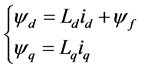 (5)
(5)
电磁转矩方程:
 (6)
(6)
式中: 和
和 分别为
分别为 轴和
轴和 轴磁链;
轴磁链; 和
和 为两相定子绕组
为两相定子绕组 轴和
轴和 轴自感;
轴自感; 为定子电阻;
为定子电阻; 和
和 为
为 轴和
轴和 轴电枢电流;
轴电枢电流; 为转子旋转角速度;
为转子旋转角速度; 为微分算子符号;
为微分算子符号; 为电机极对数;
为电机极对数; 是永磁体产生的磁链,
是永磁体产生的磁链, 为常数。
为常数。
4. 控制策略及建模
4.1. 发电机侧控制策略及仿真模型
本文采用双PWM调制信号控制全功率变流器,机侧控制回路如图2所示;控制目的为:风速变化过程中,控制发电机转矩和转速,实现最佳功率输出[5] 。控制回路由双闭环回路构成,外环为发电机转速控制,内环为电流控制。发电机侧三相电流在 、
、 轴同步旋转坐标下进行解耦变换,分别得到
轴同步旋转坐标下进行解耦变换,分别得到 、
、 轴的电流分量,电流分量分别与内外环信号比较,然后通过PI控制器调节和坐标逆变换得到调制信号输入值,最终实现整流器的控制。式(6)中
轴的电流分量,电流分量分别与内外环信号比较,然后通过PI控制器调节和坐标逆变换得到调制信号输入值,最终实现整流器的控制。式(6)中 ,因此理论上内环电流应该为0,整个控制过程只与
,因此理论上内环电流应该为0,整个控制过程只与 轴电流分量有关。
轴电流分量有关。
4.2. 并网侧控制策略及仿真模型
网侧同样采用双闭环的控制回路,控制的目的为:使得直流母线电压稳定,并将直流电转化为可以并网的交流电,控制模型如图3所示。传统中小型风力发电系统控制采用单电流控制方法,针对此方法
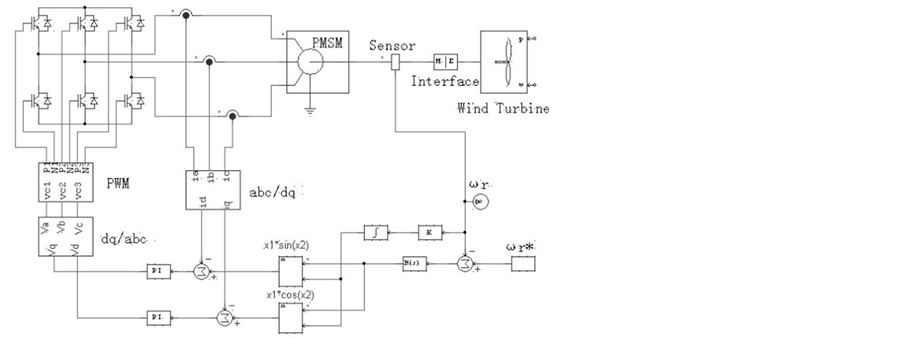
Figure 2. The generator-side control model of PMSG
图2. 发电机侧整流控制仿真模型
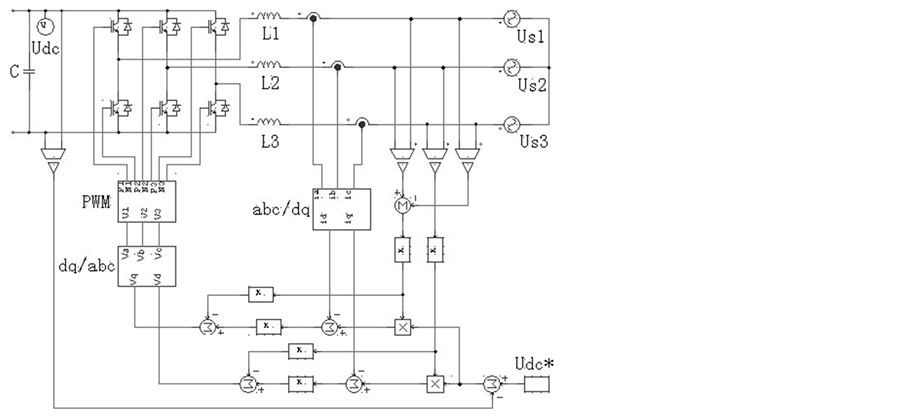
Figure 3. The grid-side control model of PMSG
图3. 并网侧逆变控制仿真模型
的不足,本文采用电压定向矢量控制方法[6] [7] 。电压定向矢量控制分为间接控制和直接控制法,本文采用动态性能更佳的直接电流控制方法,直接电流控制采用电流闭环控制,电流响应速度快,鲁棒性好[8] 。网侧三相电流经过Park变换得到同步旋转坐标下的 、
、 轴电流分量,内外环给定信号与反馈电流信号分别作差,再经过前馈电压补偿得到
轴电流分量,内外环给定信号与反馈电流信号分别作差,再经过前馈电压补偿得到 、
、 轴电压分量,电压分量通过坐标反变换形成PWM信号,完成逆变和直流电压控制。
轴电压分量,电压分量通过坐标反变换形成PWM信号,完成逆变和直流电压控制。
5. 仿真结果分析
本文在PSIM9.0中的SIMCAD软件界面搭建整个D-PMSG模型,其主要的参数如下:PMSG额定容量为3 kW;电感 ;定子电阻
;定子电阻 额定风速为
额定风速为 ;定子转速为26 rad/s;风力机风轮半径为2 m;空气密度
;定子转速为26 rad/s;风力机风轮半径为2 m;空气密度 ;变频器开关频率为10 kHZ;直流母线电容
;变频器开关频率为10 kHZ;直流母线电容 ;直流母线电压
;直流母线电压 。
。
仿真时间统一设为4 s,仿真基于额定风速以下的阶跃变化对系统参数的影响,因此风力机的桨距角固定为最优桨距角。图4中表示风速从9 m/s跃变到额定风速12 m/s的变化过程,图5~11表示风速突变
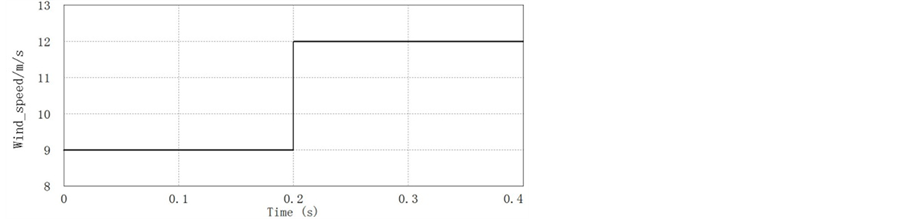
Figure 4. Abrupt change in wind speed
图4. 风速跃变
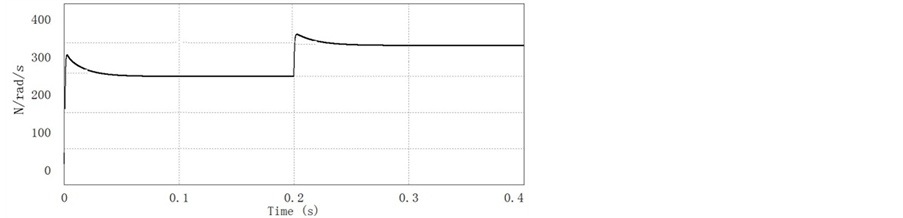
Figure 5. Generator rotational speed changing
图5. 发电机转速变化
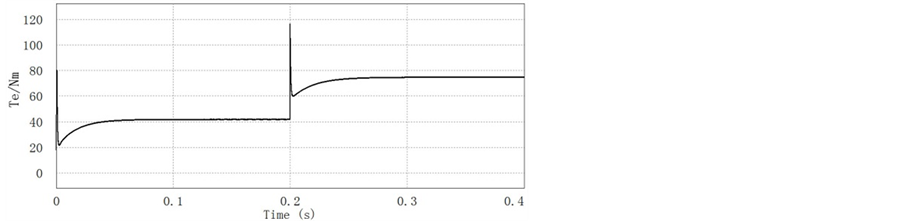
Figure 6. Electromagnetic torque
图6. 电磁转矩
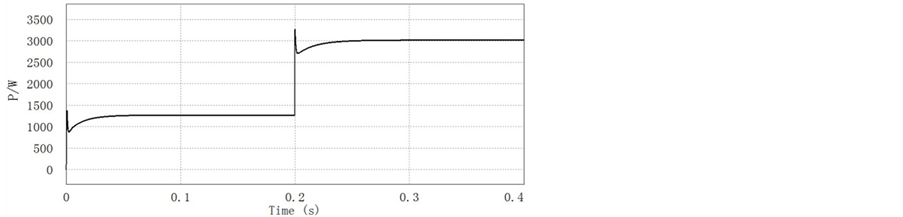
Figure 7. Output power of PMSG
图7. 发电机输出有功功率
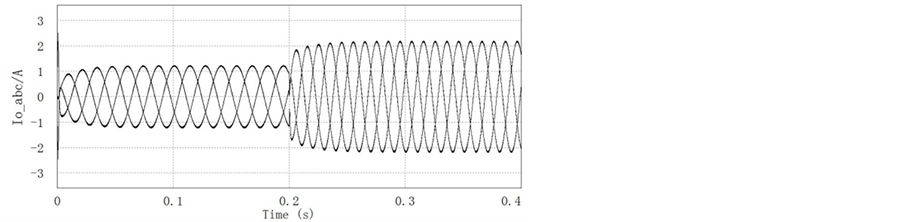
Figure 8. 3-phase current signals
图8. 坐标变换三相电流信号
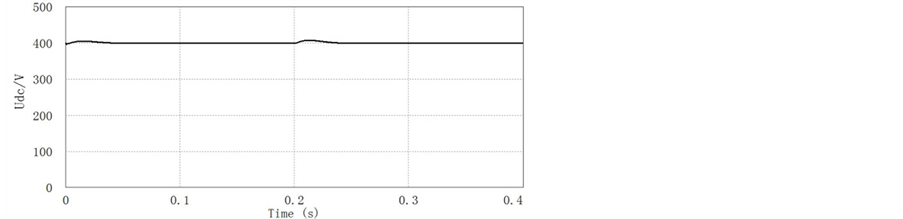
Figure 9. DC voltage
图9. 直流电压
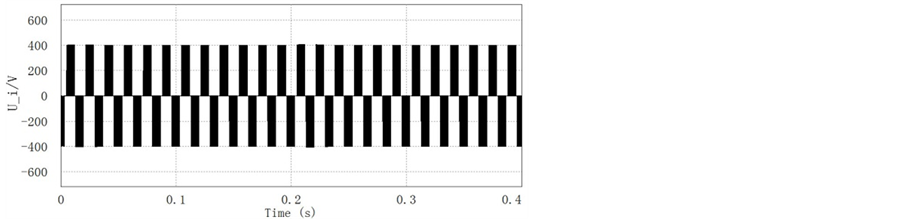
Figure 10. Output voltage of the inverter
图10. 逆变器输出电压
过程中D-PMSG中的主要物理参数变化情况。D-PMSG控制的主要目的是使得发电机获得最优转速从而发出最佳的有功功率,从图5可以看出风速处于9 m/s和12 m/s 时,转速相当稳定,当风速跃变时,转速响应十分迅速,很快能达到稳定转速;同时图6中发电机的电磁转矩也几乎没有谐波,风速突变时同样具有很快的恢复速度,说明发电机运行状态十分良好。从图7发电机侧坐标变换三相电流输入信号
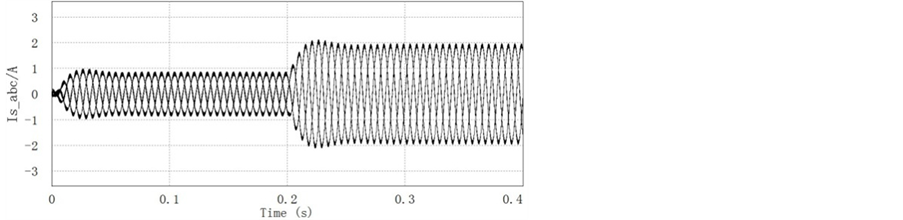
Figure 11. The three-phase grid connected current
图11. 三相并网电流
也可以看出,整个机侧控制策略下的参数波形完全符合要求。图9所示直流电压表明网侧电压反馈达到控制目标值,并且直流电压利用率十分的高,风速变化并未给直流电压带来过大的冲击,这为并网创造了良好的条件。逆变器将直流电转换成交流电的效果可以从图10和图11看到,未经过电感的电压波形十分的标准,电流波形中只有很少的谐波信号,可以达到并入电网的要求。
综上所述,从各物理参数仿真结果知,风速发生阶跃过程中,发电机转速和转矩响应迅速,十分稳定,网侧直流电压控制情况良好,能达到并网要求,这充分说明系统控制策略优越,模型和仿真结果准确,较好的反映了D-PMSG中各个物理参数的特性。
6. 结论
在PSIM9.0的SIMCAD软件中搭建直驱永磁风力发电机组仿真模型,各个物理参数均经过准确计算,最终利用SIMVIEW软件观察到各个仿真结果与理论计算值相符,表明D-PMSG模型设计合理。PSIM软件中,PMSG模型简单,控制回路清晰直观,仿真界面有利于结果分析,大大缩短了研究周期,为D-PMSG进一步研究提供了基础,同时为其它传动控制的建模和仿真提供了新的途径。
基金项目
本研究受四川省教育厅自然科学基金项目(12ZB161)资助。